新型变色触觉传感器,让机器人“看见”触碰
2026-07-04 16:04:52 来源:麦姆斯咨询 评论:0 点击:
伦敦玛丽女王大学开发出一种新型变色触觉传感器,使机器人能够“看见”并实时“感知”触碰信息。该变色触觉传感器工作原理是将不可见的机械作用力转化为动态的色彩图案,使接触、应变和压力等触碰信息能够即时生成高分辨率分布图。
据麦姆斯咨询报道,近期,伦敦玛丽女王大学(Queen Mary University of London)开发出一种新型变色触觉传感器,使机器人能够“看见”并实时“感知”触碰信息。这一创新成果由该校工程与材料科学学院的博士后研究人员Giacomo Sasso提出并实现。该变色触觉传感器工作原理是将不可见的机械作用力转化为动态的色彩图案,使接触、应变和压力等触碰信息能够即时生成高分辨率分布图。相关研究成果以“High-resolution real-time mechanochromic tactile sensors”为题,发表在《科学进展》(Science Advances)期刊上。
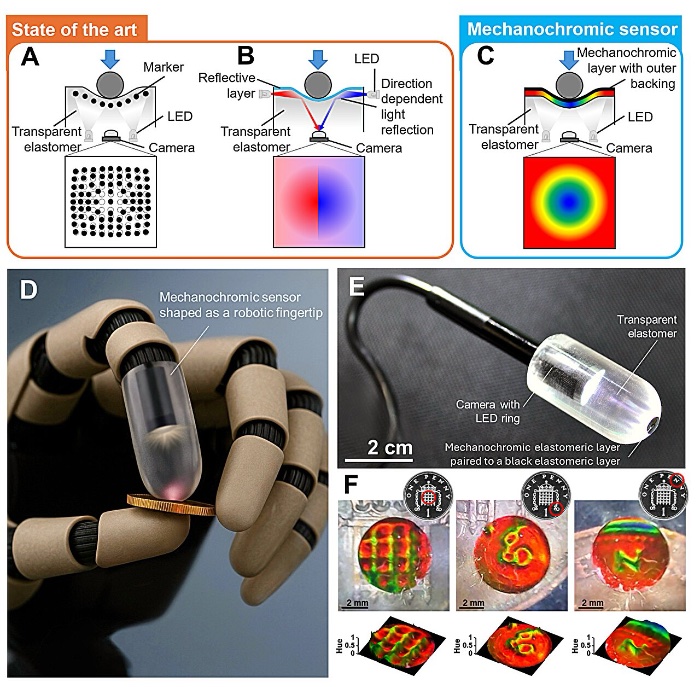
变色触觉传感器:与当前先进的视触觉传感器的对比,以及在机器人手指上的应用实例。
当压力施加于柔软的变色触觉传感器表面时,材料会产生空间变化的结构色(Structural Colors)。该结构色可由标准摄像头即时捕捉并转换为触觉信息,无需复杂的重建算法。
这项变色触觉传感器技术支持开发能够组装微型组件的机器人夹持器,使其具备精密制造所需的细腻操作能力,并能实时呈现机械作用力的每一个细微变化。该传感器也有望应用于医疗保健领域,使外部假肢(人工肢体)在执行精细的日常活动或临床任务时,获得更丰富的触觉感知。同时,该传感器还能让手术系统通过读取材料色彩响应所呈现的细微压力特征,从而区分健康组织与异常组织。
与传统的触觉传感器不同,该变色触觉传感器将传感功能直接嵌入材料本身。机械相互作用力被转化为色彩场,可由低成本USB摄像头实时读取,并且具有高分辨率、实时性等优点。
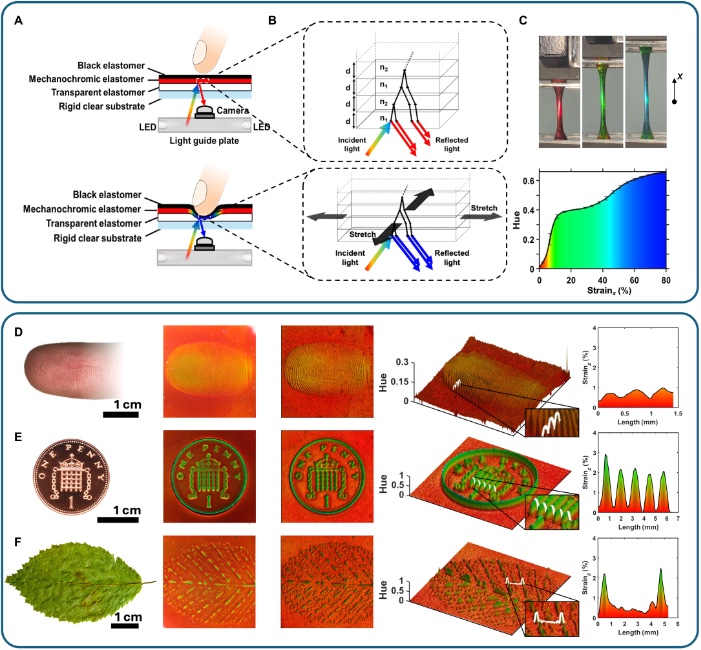
变色触觉传感器结构、工作原理及接触形貌图示例
Giacomo Sasso说道:“当你用手指按下电灯开关时,会产生海量的信息,这往往超乎人们的想象。人手包含超过10000个机械感受器来完成这一动作,然而触觉感知至今仍是机器人技术面临的主要挑战之一。我们此次研发的变色触觉传感器正是为了解决该挑战。”
本项目参与者James Busfield教授指出:“最令人瞩目之处在于,相关触觉信息已包含在光信号之中。这意味着你不再需要通过计算重构算法来感知触觉信息,而是能够直接观测到它。”来自意大利佛罗伦萨大学、的里雅斯特大学和特伦托大学的项目合作者们对此表示赞同。
这一创新构想源于克服基于视觉的触觉传感器领域中一个长期存在的权衡难题的需求:高分辨率系统通常需要复杂的计算流程来重构接触几何形状,从而导致延迟;而响应速度较快的系统往往又会牺牲空间细节。
该项目实现了软体机器人触觉传感技术与材料科学研究领域的融合。该研究团队基于在可拉伸传感器和聚合物特性表征方面多年的研究积累,不断提升了将机械柔性与功能性传感相结合的能力。在此框架下,力致变色材料开辟了一条新路径:这种材料无需依赖精密设计的微电子元件来解读形变(即触觉单元),而是自身充当传感介质,直接将机械相互作用力转化为可见的光学信号。
论文链接:https://www.science.org/doi/10.1126/sciadv.aee5236
延伸阅读:
相关热词搜索:触觉传感器
上一篇:微型三维磁性力传感器,提升机器人灵巧操作能力
下一篇:最后一页