高灵敏热式MEMS差压传感器:估算水下速度与偏航角、识别障碍物
2026-05-02 16:47:20 来源:麦姆斯咨询 评论:0 点击:
研究团队提出了一种具有高灵敏度的热式MEMS差压传感器,其特征在于将精确设计的热式测量组件集成于微悬臂梁结构上。该差压传感器在水下实现了优异的差压分辨率和较低的重复性标准差,在水下流场感知及水下机器人控制方面展现出广阔的应用潜力。
精准感知流体动力学信息对于水下机器人在复杂水下环境中的智能导航与控制至关重要。当前基于膜片的差压传感器通常受限于分辨率不足,难以满足流体动力学感知需求。
据麦姆斯咨询报道,近日,北京航空航天大学与西北工业大学组成的研究团队提出了一种具有高灵敏度的热式MEMS差压传感器,其特征在于将精确设计的热式测量组件集成于微悬臂梁结构上。该差压传感器在水下实现了优异的差压分辨率(18.9 mPa)和较低的重复性标准差(0.38%)。通过将由三个此类传感器构成的阵列集成到水下机器人模型中,可同时实现速度与偏航角的估算,其平均求解误差分别为2.9 mm·s⁻¹和0.94°。得益于其高灵敏度,通过感知卡门涡街(Kármán vortex street)中的流体动力学变化,还可实现对水下障碍物的识别,准确率达到97.5%。总体而言,该热式MEMS差压传感器在水下流场感知及水下机器人控制方面展现出广阔的应用潜力。上述研究成果以“Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception”为题发表于Microsystems & Nanoengineering期刊。
热式MEMS差压传感器的设计
为实现水下差压的高精度测量,研究人员设计了图1a所示的热式MEMS差压传感器,其由压力腔和传感芯片构成。该传感芯片包括一对带有微间隙的悬臂梁(800 μm × 500 μm),其端部集成了加热器和铂(Pt)热敏电阻。得益于悬臂梁结构,加热器和热敏电阻与衬底实现了良好的热隔离,从而有效降低了通过硅(Si)衬底的热传导。热式MEMS差压传感器的工作原理如图1b所示。
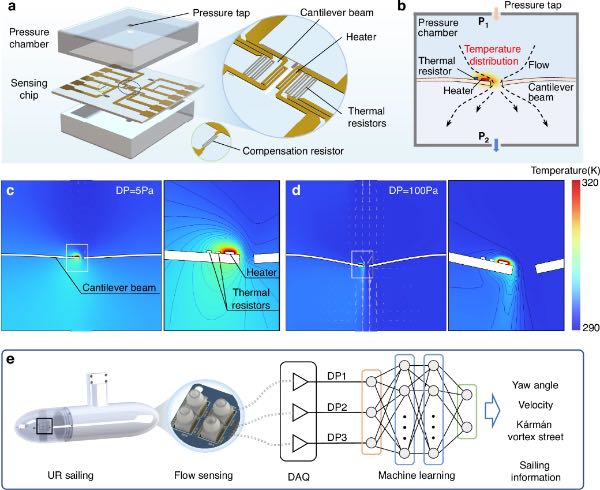
图1 热式MEMS差压传感器设计
为进一步阐明并验证热式MEMS差压传感器的工作原理,研究人员建立了一个热-流体动力学耦合仿真模型。如图1c所示,当微悬臂梁两侧施加5 Pa的差压时,在微间隙处会产生可测量的局部流动。该局部流动引起的热对流会降低靠近加热器的热敏电阻温度,从而产生包含流动压力信息的信号输出。当差压增大至100 Pa时,加速的局部流动会引发更强的热对流效应,进一步降低热敏电阻的温度(图1d)。这一基本原理使得热式MEMS差压传感器能够解析流体压力的变化。如图1e所示,热式MEMS差压传感器可被集成于水下机器人模型的前端。通过预训练的基于机器学习的神经网络模型,可以估算偏航角、速度以及涡源位置等多种航行信息。
热式MEMS差压传感器的制备
传感芯片是热式MEMS差压传感器实现高精度测量的核心部件。如图2a所示,研究人员提出的MEMS制造工艺流程为:首先,采用LPCVD工艺在双面抛光、晶向为(100)的硅衬底上沉积低应力氮化硅(Si₃N₄)薄膜。随后,采用离子束溅射结合lift-off工艺制备用于热敏电阻与补偿电阻的金属层,其电阻温度系数为1150 ppm/°C。电极与加热电阻同样采用相同工艺制备。通过双面光刻在背面Si₃N₄薄膜上图形化光刻胶,随后以该光刻胶作为掩膜,采用反应离子刻蚀(RIE)对Si₃N₄薄膜进行刻蚀。图形化后的Si₃N₄薄膜作为硬掩膜,在90 °C条件下使用25 wt% TMAH溶液对硅衬底进行各向异性湿法刻蚀。当刻蚀深度接近上层Si₃N₄薄膜时停止湿法刻蚀。随后,通过RIE刻蚀去除上层Si₃N₄薄膜,从而形成悬臂梁结构。最后,采用HNA溶液对硅衬底进行各向同性湿法刻蚀,以释放悬臂梁结构。完成制备的热式MEMS差压传感器如图2d所示。
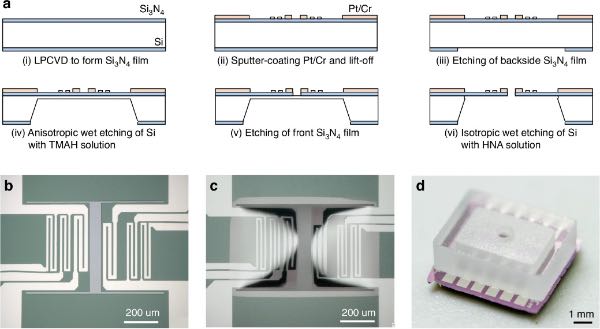
图2 热式MEMS差压传感器的制备工艺流程和照片
热式MEMS差压传感器的性能表征
为了表征热式MEMS差压传感器的性能,将其按照如图3a所示形式进行封装。该差压传感器的测压口通过硅胶管连接至移动液槽与固定液槽的底部接口(图3b)。
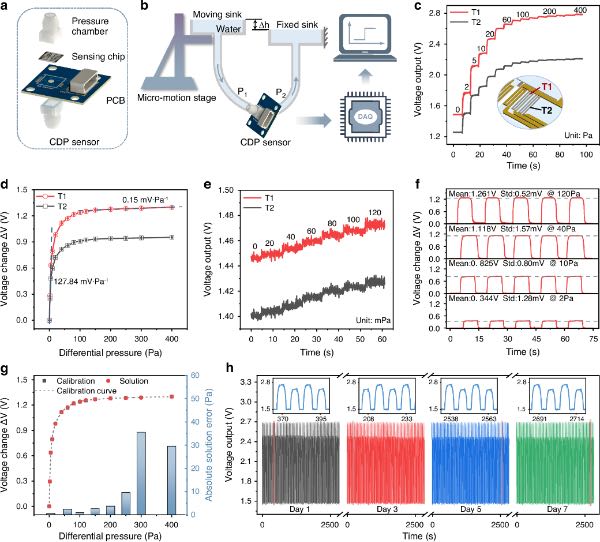
图3 热式MEMS差压传感器的性能表征
研究人员定义了两个热敏电阻,其按照与加热器的距离远近分别记为T1和T2,并与各自的补偿电阻一起连接至差分放大电路。该差压传感器工作在恒压模式下,加热电压为2 V,在该条件下可获得较高的信噪比。如图3c所示的响应结果表明,两个热敏电阻的输出电压均随差压的增加而单调上升。图3d展示了在0–400 Pa差压范围内两个热敏电阻的相对电压变化ΔV,结果表明距离加热器最近的热敏电阻通常表现出最高的灵敏度。研究人员对热式MEMS差压传感器的差压分辨率进行了评估,结果如图3e所示。
为评估热式MEMS差压传感器的稳定性,在为期一周的时间内,分别于第1、3、5和7天对其施加20 Pa和60 Pa的差压进行多次加载–卸载循环测试。图3h展示了该传感器稳定的动态电压输出响应,并且其零点漂移几乎可以忽略不计。
水下速度与偏航角的估算
热式MEMS差压传感器的高灵敏度与良好重复性使其特别适合用于水下航行器运动参数的测量。如图4a所示,该差压传感器被用于估算水下机器人模型的速度与偏航角。图4b展示了传感器在水下机器人模型上的压力测点分布。
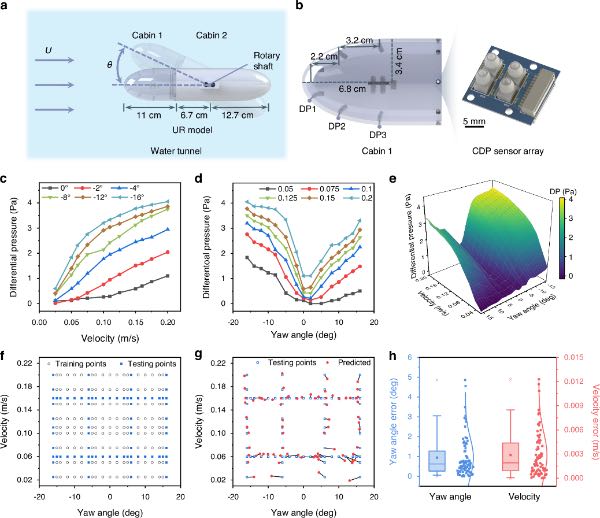
图4 基于热式MEMS差压传感器阵列的水下速度与偏航角估算
图4c表明,在不同偏航角条件下,DP2处的差压随速度增加而增大。在固定偏航角下,水下机器人模型前缘对称点处的流场畸变相对稳定;而速度的增加会放大这些对称点之间的差压。图4d展示了不同速度条件下,DP2处差压随偏航角的变化规律。偏航角的增大会导致水下机器人模型前缘对称点之间的流场差异更加显著,进而使压力梯度增大,从而导致这些对称点之间的差压进一步增加。如图4e所示的三维曲面图表明,DP2处差压随速度与偏航角变化呈现稳定的规律性变化,这为后续基于神经网络的速度与偏航角预测提供了有效支撑。
多层感知机(MLP)神经网络能够实现输入到输出之间的高度非线性映射,具有结构简单和较强泛化能力的特点。因此,采用MLP神经网络对测试数据进行训练,并用于航行参数的估算。热式MEMS差压传感器阵列(DP1–DP3)的数据作为输入层,MLP神经网络输出速度与偏航角。训练集如图4f所示,图4g给出了测试集的预测结果(红色点),其与实际值高度一致。图4h展示了速度与偏航角绝对估算误差的统计结果,平均估算误差分别为2.9 mm·s⁻¹和0.94°。
水下障碍物的识别
鱼类通过侧线系统感知并处理流场信息,能够基于流体动力学特征准确识别不同的猎物和物体,如图5a所示。受这一生物机制启发,研究人员在水下机器人模型中将该差压传感器阵列与机器学习算法进行了概念性整合,使其能够利用测得的流体动力学信息识别水下障碍物。
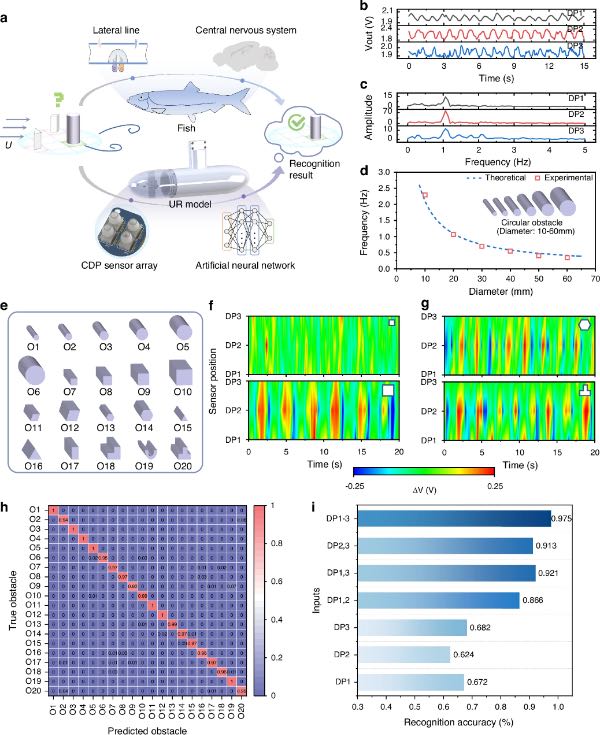
图5 利用热式MEMS差压传感器阵列进行水下障碍物识别
用于水下障碍物识别的20种障碍物示意图如图5e所示。采用MLP神经网络对测试数据进行训练,并用于识别水下障碍物。通过将流体动力学感知与基于MLP的机器学习模型相结合,研究人员成功验证了水下机器人模型具备识别水下障碍物的能力,其识别准确率高达97.5%(图5h)。
为验证热式差压传感器数量对识别精度的影响,研究人员在不同输入条件下对识别结果进行了比较。如图5i所示,随着热式差压传感器数量的增加,识别准确率逐步提升,表明多传感器融合的有效性。传感器数量的增加能够有效降低随机噪声对识别结果的干扰。此外,多传感器融合还可以整合多维度的流场特征,从而实现更加全面且精确的流体动力学感知。
论文链接:https://doi.org/10.1038/s41378-026-01270-9
延伸阅读:
《安费诺NovaSensor压力传感器芯片P883产品分析》
《Merit Sensor压力传感器及MEMS芯片产品分析》
上一篇:新型液态金属应变传感器,可用于手势识别和脉搏监测
下一篇:最后一页