微型三维磁性力传感器,提升机器人灵巧操作能力
2026-06-13 16:45:04 来源:麦姆斯咨询 评论:0 点击:
这一突破使得开发紧凑型三维磁性力传感器成为可能,为微型触觉传感器和具身智能(尤其是机器人感知领域)开辟了一条可靠的技术路径。
采用向心磁化设计的磁性触觉传感器能够实现高效的三维(3D)力解耦感知,这对于提升机器人灵巧操作能力至关重要。然而,传感器的微型化仍面临挑战,主要源于此类平面磁结构精密制造的复杂性。
据麦姆斯咨询报道,近期,浙江大学赵朋教授和张承谦助理研究员等人提出了一种激光辅助折叠与磁化(LAFM)方法,用于制备向心磁化薄膜。通过激光刻蚀的沟槽实现了可控折叠,从而在小至5 mm × 5 mm的薄膜中实现了精确的磁化对齐。这一突破使得开发紧凑型三维磁性力传感器成为可能,为微型触觉传感器和具身智能(尤其是机器人感知领域)开辟了一条可靠的技术路径。相关研究成果以“Miniaturized 3D Magnetic Force Sensor via Laser-Assisted Folding and Magnetization for Enhanced Robotic Dexterity”为题发表在Advanced Science期刊上。
研究人员提出的激光辅助折叠与磁化(LAFM)方法,能够构建具有3D力解耦能力的小型磁性力触觉传感器。LAFM三维力传感器从上到下由三个功能层组成,包括向心磁化薄膜单元、刚度可调的弹性体和印刷电路板(PCB),其核心部件是霍尔效应传感器(型号为MLX90393)。弹性体是使用Ecoflex 00–30作为基材制造的,其刚度可以通过添加硅油或聚二甲基硅氧烷(PDMS)来调节。
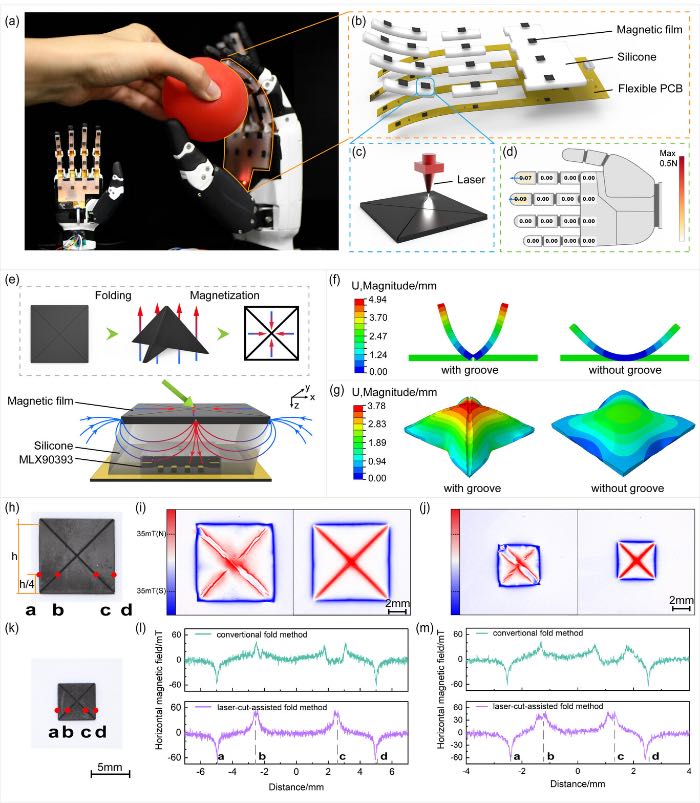
面向微型三维磁性力触觉传感器的LAFM方法
LAFM方法利用激光加工在薄膜表面创建沟槽结构,降低材料的局部刚度。在专用夹具的辅助下,薄膜进行受控折叠,然后在高强度外部磁场下磁化。使用这种方法,研究人员制备了具有精确磁化排列的向心磁化薄膜,其面积范围从400 mm²到25 mm²。仿真与实验均证实了LAFM方法的有效性。仿真结果表明,尽管沟槽结构略微降低了薄膜的磁场强度,但可以通过引入校正系数来补偿这种影响。实验证明,5 mm × 5 mm薄膜的磁场分布与理论模型高度一致(切向RMSE < 2 µT,法向RMSE < 5 µT)。
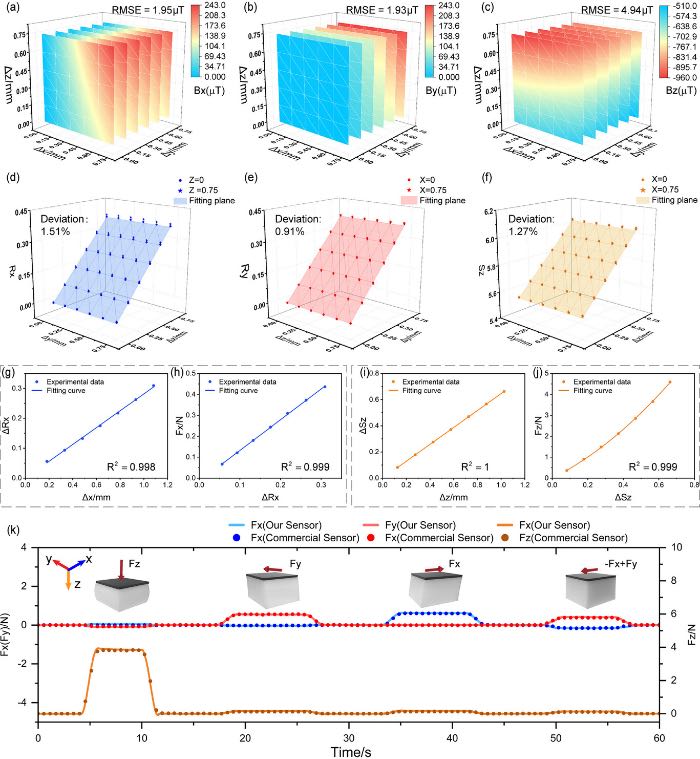
微型磁性力触觉传感器的三维力解耦特性
基于LAFM方法,研究人员开发了一种紧凑型三维力传感器,能够实现亚毫米分辨率(0.01 mm)的高精度位移解耦。该传感器在4.5 N(法向)和0.45 N(切向)的范围内实现了可靠的力测量,相应的分辨率为3 mN和9 mN。此外,该传感器展现出34 ms的快速动态响应时间,并在2500次加载循环中保持优异的稳定性(偏差< 1%)。
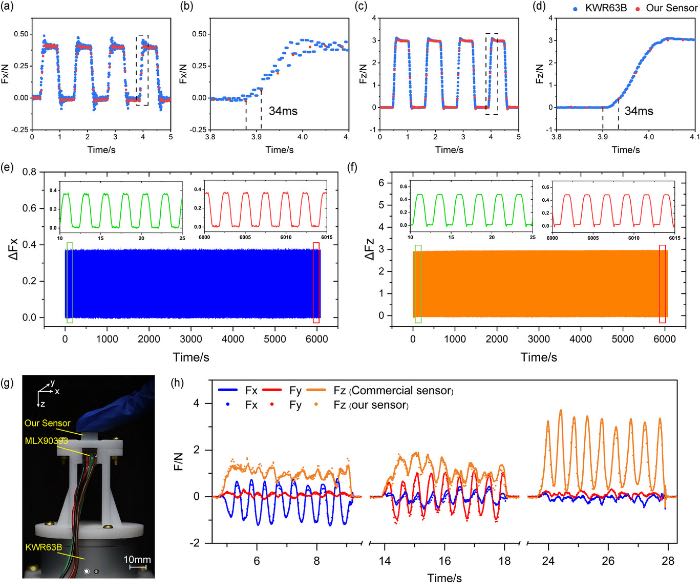
三维力传感器的动态响应特性、循环耐久性和实际交互性能
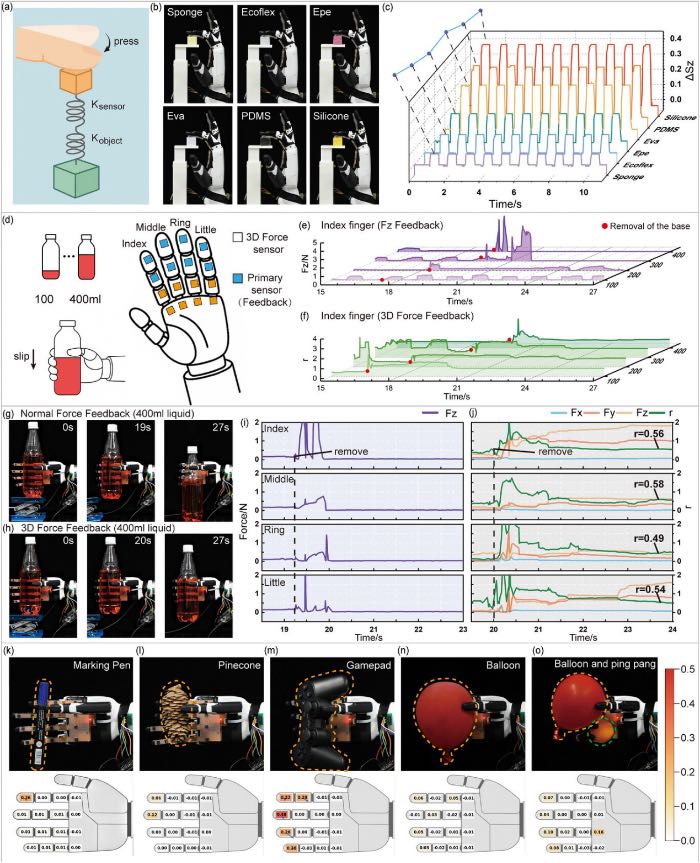
该三维力传感器被部署在多个机器人平台上,展示了从自适应抓取到高级感知的进展。在移动机械手上,它确保在穿越障碍时牢牢抓住脆弱的樱桃番茄。随着任务复杂度的提升,配备了16个传感器单元的灵巧手提供了全方位的力反馈。这使得能够对六种代表性材料进行非破坏性的刚度辨别,并稳定地抓取不同的物体。此外,三维力反馈被证明是至关重要的,在突发干扰中能够可靠地处理可变质量的物体(例如100-400 mL的液体),其表现明显优于仅依赖法向力的系统。
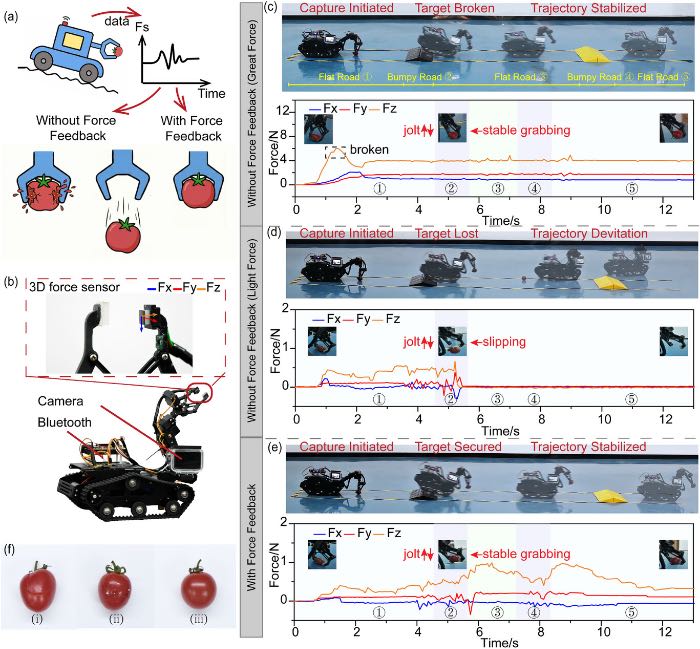
越障实验中的抓取性能对比
灵巧手上分布式三维力传感器实现的刚度感知与主动抓取
总之,LAFM方法能够实现微型薄膜的精确向心磁化,为高灵敏度和快速响应的三维磁性力传感器铺平了道路。这一进展提高了机器人在复杂环境中操作的灵巧性和稳定性。未来的应用仍有巨大的改进空间。一方面,必须进一步提高传感器的集成密度。通过引入飞秒激光和先进的磁化技术,有望实现大面积磁性薄膜阵列的单片生产。这种进展还将促进其在复杂曲面的无缝集成,从而满足不同机器人形态的多样化触觉传感需求。另一方面,传感系统的功能维度仍有很大的拓展潜力。除了力测量,系统的功能还可以扩展至位置检测和形状识别。这种多模态融合将有助于更全面地理解外部环境。此外,鉴于霍尔效应传感器的温度敏感特性,开发工作将集中在集成温度传感器和实时补偿算法上。这种集成对于提升系统的鲁棒性和环境适应性至关重要。基于LAFM方法的触觉传感器有望成为下一代机器人的核心传感元件,其不仅将赋予机器人更稳定、更精细的操作能力,还将推动其向自主执行日益复杂且多样化任务的方向迈进。
论文链接:https://doi.org/10.1002/advs.202524321
延伸阅读:
上一篇:基于悬臂梁压力传感器的可穿戴听诊贴片,助力远程医疗监测
下一篇:最后一页