新型柔性触觉传感器助力机器人精确感知力和温度
2025-09-14 15:53:44 来源:麦姆斯咨询 评论:0 点击:
F3T传感器能够精确解耦温度、法向力、全方位切向力。当与物体接触时,F3T传感器接收到的复合信号被分离出来。离子凝胶层首先解耦并测量温度。然后,通过结构设计和材料调控,浮动电容器精确测量法向力,磁性薄膜测量切向力。
据麦姆斯咨询报道,Engineering期刊上最近发表的一项研究论文展示了机器人触觉传感技术的重大进展。研究人员开发出一种名为“F3T传感器”的新型柔性触觉单元——其能够准确解耦三维力和温度测量值。
人体皮肤能够精确感知接触力和环境温度,但现有的柔性触觉传感器在精确解耦这些信号方面面临挑战。这一局限性限制了机器人执行高级任务的能力。本研究最新开发的F3T传感器的灵感源自人体皮肤的结构和功能,它采用四层设计,融合了多种材料和传感原理。
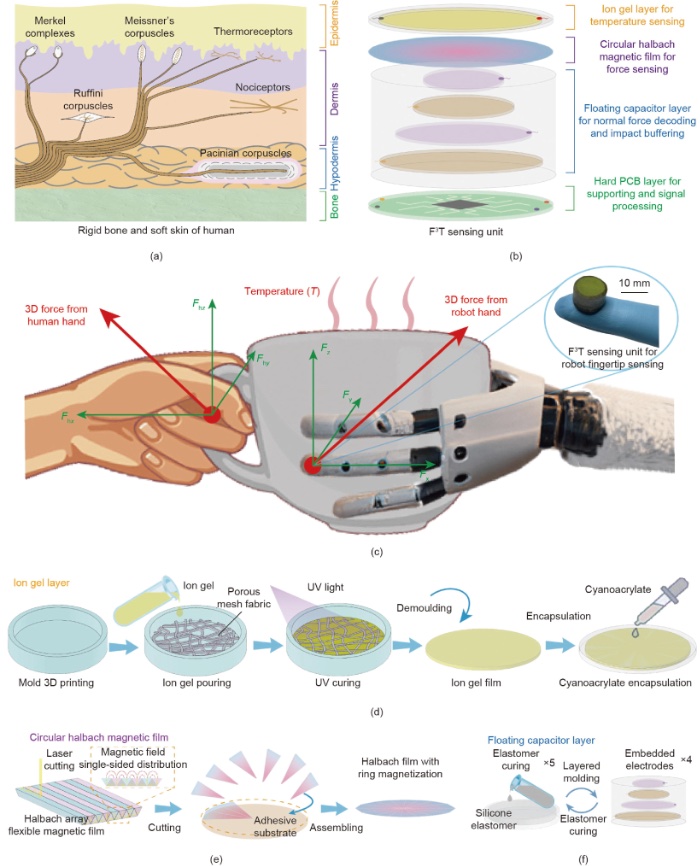
具有解耦三维力和温度传感能力的柔性触觉单元概览
最顶层是基于离子凝胶的温度传感薄膜。当温度变化时,凝胶中聚合物链之间的距离会发生变化,从而导致电阻的变化,这使得独立的温度测量成为可能。第二层是带有浮动贴装多层电容器的圆形同轴磁性薄膜。这种设计有助于物理解耦各个方向的法向力和切向力。第三层为浮动电容器,仅对法向力敏感,有效消除了切向力的影响。第四层为硬质PCB层,用于支撑和信号处理。F3T传感器内部的硅橡胶弹性体类似于人体皮肤的皮下组织,有助于连接元件并缓冲冲击力。
F3T传感器能够精确解耦温度、法向力、全方位切向力。当与物体接触时,F3T传感器接收到的复合信号被分离出来。离子凝胶层首先解耦并测量温度。然后,通过结构设计和材料调控,浮动电容器精确测量法向力,磁性薄膜测量切向力。
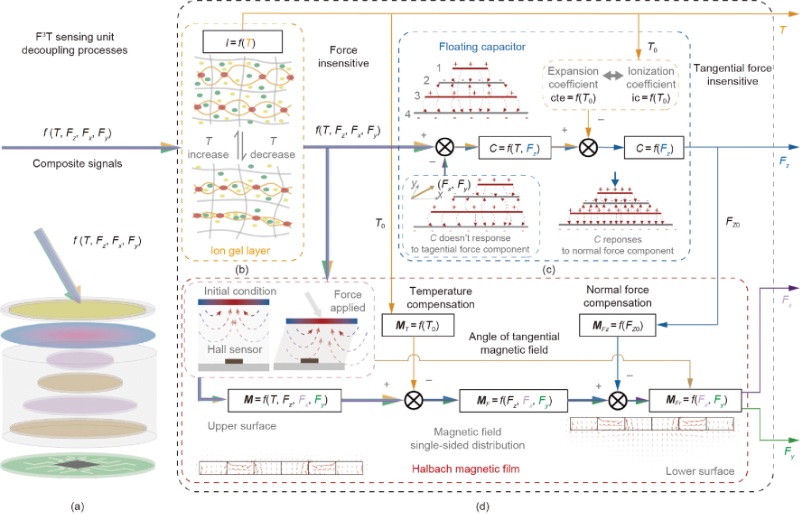
F3T传感器信号解耦流程及原理
特性测试表明,F3T传感器性能优异。离子凝胶中的接触温度与电流的关系经过校准,温度测量几乎不受外力影响。法向力测量精度高,切向力测量能够精确检测大小和方向。该传感器还具有快速的动态响应。
研究人员在静态和动态条件下评估了F3T传感器的性能。在静态测试中,它能够精确地测量三维力和温度,并且误差极低,优于传统的触觉传感器。在动态测试中,当集成到机器人夹持器中时,它能够使夹持器自适应地响应外部干扰并实现稳定的抓取。
F3T传感器还在自动化化学反应过程和人机协作场景中得到了验证。在聚乙烯醇(PVA)溶液的制备过程中,该传感器有助于精确控制加热和摇晃过程。在“送茶”任务中,该传感器使机器人能够感知人类意图并完成平稳的交接。
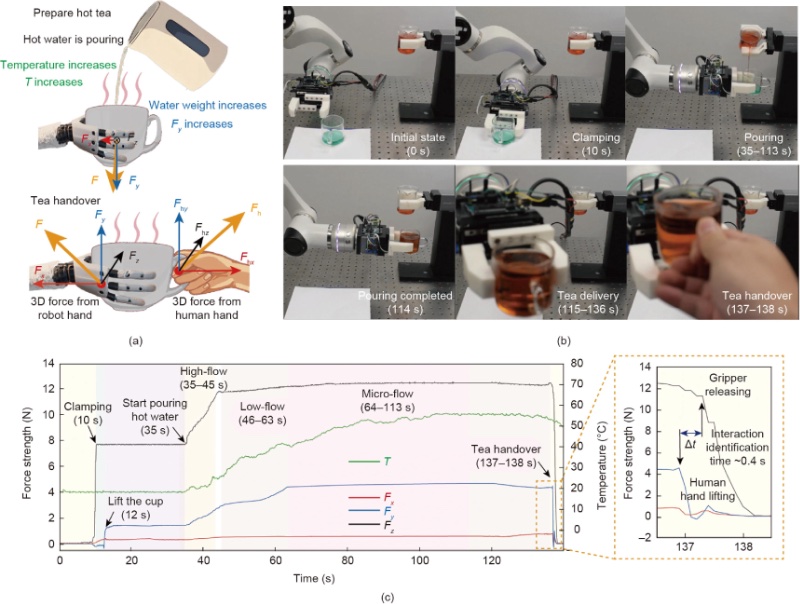
基于F3T传感器实现有效的人机协作
尽管F3T传感器展现出巨大的应用潜力,但仍有改进的空间,例如增强层间粘合力、确保性能一致性以及减少温度测量延迟。总而言之,该新型柔性触觉传感器技术有望推动在各种应用中开发更具适应性的机器人系统。
论文链接:https://doi.org/10.1016/j.eng.2025.02.008
延伸阅读:
上一篇:基于超构材料的触觉传感器,提升压力传感性能
下一篇:最后一页