可穿戴力传感系统,拓展机器人感知功能
2026-02-01 11:24:38 来源:麦姆斯咨询 评论:0 点击:
国立清华大学的研究团队开发了一款基于柔性材料和结构的电容式力传感系统,其硬件尺寸缩小87%,同时实现接口微型化,并提升了信号处理模块(力-电容的转换)的稳定性,以满足可穿戴形态机器人应用的需求。
随着技术发展与对测量精度的不断追求,各类力传感器被相继研发,用于监测不同活动场景下的物理量。随着市场需求持续增长,可穿戴电子产品的应用场景不再局限于人体领域(例如运动科学领域),而在机器人领域的应用价值也日益凸显。因此,将相关力传感器与系统集成到特定应用不仅是必然趋势,更凸显了模块化与微型化的重要性。
据麦姆斯咨询报道,近日,国立清华大学的研究团队开发了一款基于柔性材料和结构的电容式力传感系统,其硬件尺寸缩小87%,同时实现接口微型化,并提升了信号处理模块(力-电容的转换)的稳定性,以满足可穿戴形态机器人应用的需求。该系统由力传感器、信号采集集成电路(IC)、微控制器单元(MCU)、蓝牙IC以及锂聚合物电池构成。其中,传感器采用高分子材料和弹性体制备,与腕表式传输端口连接,可实现传感信号的实时无线分析。
现场测试表明,该可穿戴力传感系统响应具有合理容差(小于2%),具备可靠的短期和长期稳定性(变化率低于5%),并且重复性优异(线性决定系数达0.9975)。这种腕表式传输端口在实际应用中优势显著,其模块化设计兼具创新性,在同类解决方案中实现了各项性能的均衡兼顾,为现有机器人赋予功能拓展能力。相关研究成果以“Miniaturized and Modularized Wearable Force Sensing System for Functionality Expansion on Existing Robots”为题发表于Advanced Sensor Research期刊。
这项研究开发的电容式力传感器采用五组分立电容元件构建紧凑型传感单元(如图1a)。该传感单元通过中央元件(C5)实现对法向力的响应探测。该力传感器采用柔性材料制备,既能与曲面实现保形接触,又可在反复载荷下保持结构完整性。器件层状结构从上至下依次为:(1)188 µm厚聚对苯二甲酸乙二醇酯(PET)层,为器件提供结构支撑和柔性特性;(2)100 nm厚溅射沉积银(Ag)上电极层,保障了高导电性能;(3)50 µm厚聚二甲基硅氧烷(PDMS)层,凭借高弹性特性作为器件的绝缘层和介电层;(4)100 nm厚Ag下电极层,与上电极层结构对称;(5)188 µm厚PET层,构成器件下层衬底并提供基础结构支撑(如图1b)。

图1 电容式力传感单元结构示意图
该电容式力传感器通过精密控制的多步工艺制备而成,核心制造工艺包括电极图案化、介电层成型以及器件组装。各制造步骤不仅旨在实现所需的几何与结构精度,更要保障机械鲁棒性、可重复性和最佳传感性能。
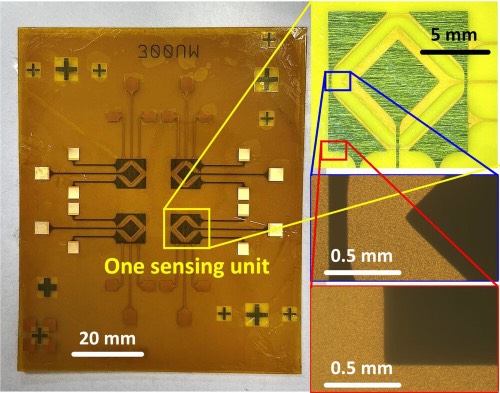
图2 所制备的力传感器(4 × 4阵列)的边缘和角落电极的放大视图及对应比例标注
为实现电容响应的实时采集,研究人员采用了电容-数字转换器,并通过集成电路间(I2C)的通信协议与微控制器单元进行串行通信。测量信号通过微控制器单元集成的低功耗蓝牙(BLE)功能传输至计算机。经数据库比对后,通过该系统架构,将实时传感信息在图形用户界面(GUI)上显示(如图3)。
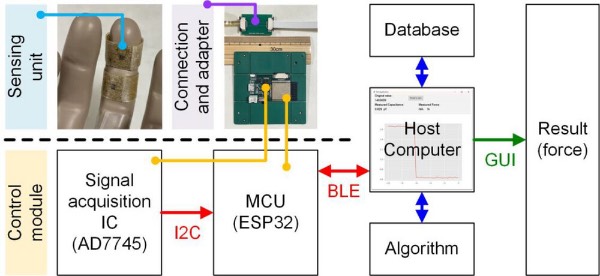
图3 传输端口中传感单元与控制模块的架构及关联关系,及其与数据库、算法和GUI的交互关系。
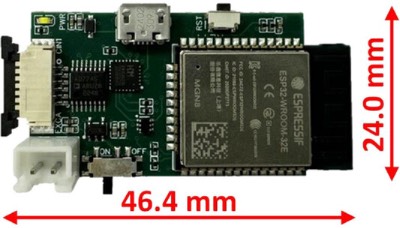
图4 相关模块集成在PCB上的俯视图及尺寸标注,该结构在图3的控制模块中亦有呈现。
这项研究的目标不仅在于开发力传感器,更致力于实现信号处理模块和传输端口的微型化(如图5a),以满足现有机器人对集成器件轻量化、紧凑型的需求。因此,研究人员最终采用将PCB与电池垂直堆叠的设计方案,并设计出矩形腕表式简约外壳(如图5b)。此外,为实现腕带的快速适配;研究人员在外壳两侧增设了两个插槽,可兼容市售Apple Watch腕带(如图5c和图5d)。
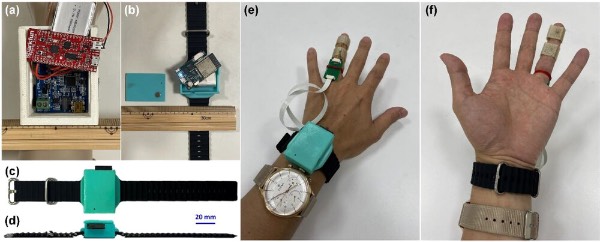
图5 腕表式可穿戴力传感系统实物展示
该力传感单元专为可穿戴形态的机器人应用场景设计。为此,研究人员搭建了模拟实际应用场景的实验装置:将力传感器安装于机械夹具的一个夹持端(如图6),通过程序控制夹具向目标物体移动,并以夹持力逐渐增大的方式完成抓取动作。其中目标物体由粉末冶金工艺制备,质地易碎且对操作控制的精度要求较高。
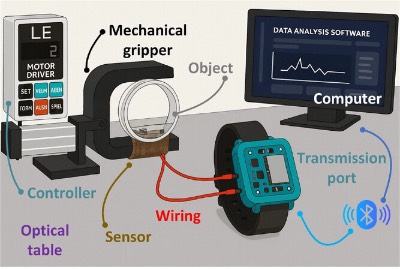
图6 实验装置示意图:搭载可穿戴力传感单元的机器人(机械夹具)、腕表式传输端口以及置于光学台上的无线连接计算机
综上所述,这项研究利用市售组件,为机器人力传感功能提供了可穿戴电子设备体积微型化的解决方案,这是一种集信号可靠性与时间效率、成本效益和操作便捷性于一体的解决方案。该设计方案使现有机器人得以拓展功能并提升辅助能力。除微型化外,模块化亦是这项研究成果的核心亮点。从供应商角度,可将传感器(商用款或定制款)与传输端口分别视为消耗品与耐用品;消耗品的持续迭代可创造稳定利润,且无需承担更换耐用传输端口的更换成本。从用户角度,该设计方案能够大幅降低潜在的繁琐维护工作与昂贵的预算投入。此外,系统的数据库可视为一种固件,通过升级即可适配不同动态检测窗口以及相应的传感器,无需改变系统的工作原理或工作流程。这一特性可作为产品的增值销售选项。基于这项研究的概念验证成果,有望构建一套全新的商业模式。
论文链接:https://doi.org/10.1002/adsr.202500147
延伸阅读:
上一篇:柔性压力触觉传感器最新进展:传感机制、性能突破与智能应用
下一篇:集成薄膜应变传感器的智能隐形眼镜实现持续眼压监测