南科大联合深圳大学开发光机电触觉传感器,助力机器人感知和医学诊断
2025-09-13 15:25:14 来源:麦姆斯咨询 评论:0 点击:
受人体手指皮肤结构特点的启发,研究人员设计了一种仿生触觉传感器。该传感器主要由对外部接触介质做出响应的GaN光芯片,以及顶面图案化有指纹状结构的PDMS薄膜组成。
触觉传感器在需要精确实时检测的机器人和医疗诊断应用中至关重要。然而,要开发出能够在三个轴向上对大范围力进行测量,并且兼具高分辨率与快速响应能力的紧凑型传感器,目前仍然存在极大局限。
据麦姆斯咨询报道,近日,南方科技大学Kwai Hei Li副教授和深圳大学朱玲副教授联合开发了一种光机电触觉传感器,该传感器采用单片集成的GaN基光芯片和指纹图案化的聚二甲基硅氧烷(PDMS)薄膜。该触觉传感器在±100 mN剪切力和0-200 mN法向力的宽测量范围内具有线性响应,检测分辨率为0.07 mN。它还显示了快速的响应时间和恢复时间,分别为0.85 ms和0.82 ms。该触觉传感器在表面形貌扫描和器官病变评估中的应用得到了实验验证,突出了其在增强机器人感知和医学诊断方面的潜力。相关研究成果以“GaN/PDMS-based opto-electro-mechanical tactile sensors”为题发表在Microsystems & Nanoengineering期刊上。
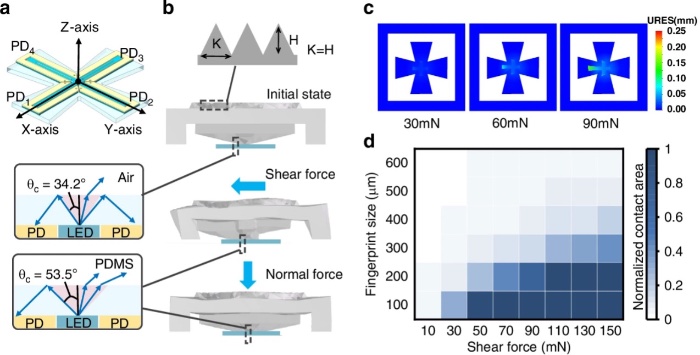
受人体手指皮肤结构特点的启发,研究人员设计了一种仿生触觉传感器。该传感器主要由对外部接触介质做出响应的GaN光芯片,以及顶面图案化有指纹状结构的PDMS薄膜组成。PDMS薄膜用于模拟人类手指皮肤的表皮,促进外部刺激的传递。同时,该光芯片模拟皮肤内迈斯纳小体(Meissner corpuscle)的功能,感知刺激并产生相应的信号。

基于GaN/PDMS的光机电触觉传感器结构
触觉传感器的传感原理如下图所示。最初,在没有对传感器施加力的情况下,折射率为1.78的光芯片的蓝宝石大部分暴露在空气中。以超过34.2°临界角的角度入射的光发生全内反射,并耦合到光电二极管(PD)。当施加剪切力或法向力时,PDMS薄膜会变形,从而增加其与蓝宝石的接触面积。考虑到PDMS的折射率为1.44,蓝宝石/PDMS界面的临界角上升到53.5°,导致反射光强度降低。
传感原理与仿真
通过有限元法进行三维模拟,研究了不同指纹结构尺寸在施加剪切力作用下对接触面积的影响。为了提供全面的理解,计算了在10-150 mN的力范围内(以20 mN为增量),不同指纹尺寸(K)下PDMS和蓝宝石之间的接触面积。最终,选择了K = 300 μm的PDMS薄膜,以在灵敏度和响应范围之间取得平衡。此外,在指纹尺寸K固定在300 μm下,评估了不同的指纹间距。研究发现,采用密集排列的指纹图案可显著提升传感器响应性能。
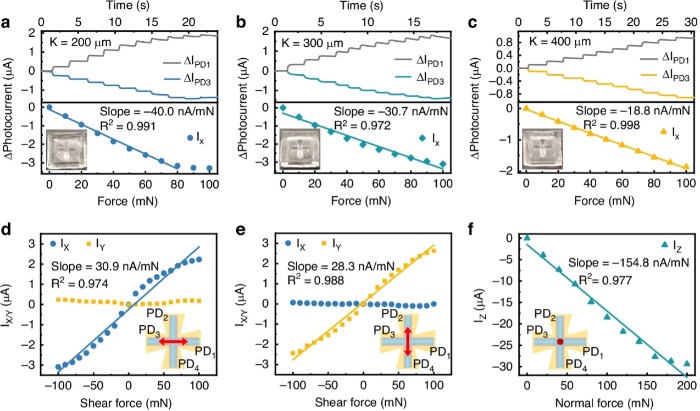
通过优化,研究人员进一步对采用十字形光芯片与K=300 μm PDMS薄膜的传感器进行了表征。下图中显示了X轴光电流(IX)与±100 mN剪切力范围的关系。线性回归分析显示,R²为0.974,灵敏度为30.9 nA/mN。同样,对于Y轴,在±100 mN的传感范围内,R²为0.988,灵敏度为28.3 nA/mN。在X轴方向测量过程中,Y轴的光电流变化极小,反之亦然,表明轴间串扰得到了高度抑制。法向力的传感范围为0-200 mN,R²为0.977,灵敏度为-154.8 nA/mN。
力传感性能
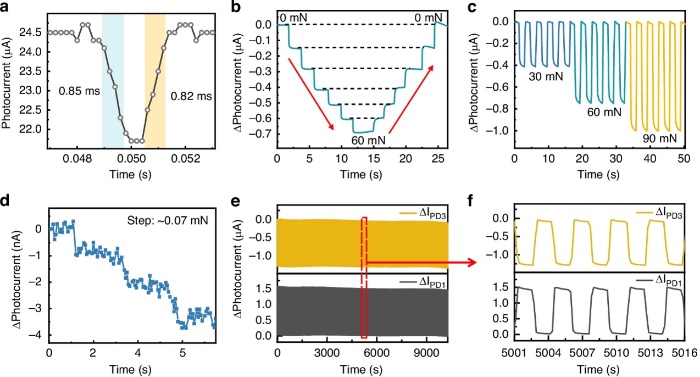
触觉传感器的动态响应特性通过施加X轴剪切力进行表征。该传感器对100 mN剪切力的瞬态响应结果表明,响应时间为0.85 ms,恢复时间为0.82 ms。根据传感器的光电流变化与施加力大小之间的线性关系,确定该传感器对剪切力和法向力的测量分辨率约为0.07 mN。
触觉传感器的动态性能和耐用性
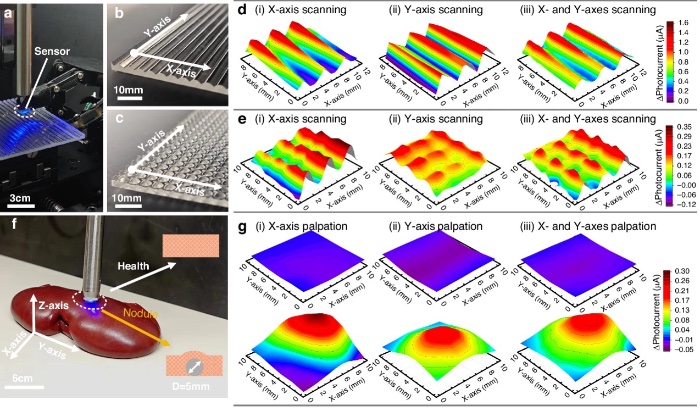
研究人员进一步探究了该触觉传感器在形态扫描领域的应用潜力。其地形扫描过程与人指尖的触觉感知机制类似:通过使触觉传感器在样品表面滑动来识别并捕获其形貌特征。在医学诊断领域,该触觉传感器可用于模拟外科触诊探头的功能,实现对样本轮廓的检测。这一应用充分证明了该触觉传感器在医学诊断领域具有良好的应用前景。
在形态学扫描和医学诊断中的应用
总而言之,研究人员开发了一种光机电触觉传感器,该传感器由单片集成的蓝宝石衬底上GaN光芯片与指纹图案化的PDMS薄膜构成。该光芯片集成了一个LED和四个独立的光电探测器,能够检测蓝宝石界面处PDMS薄膜的力诱导变形引起的光学变化,从而实现多轴力传感。通过激光切割实现的十字形芯片结构有助于提高灵敏度,并有效抑制X轴和Y轴测量间的串扰干扰。优化后的触觉传感器具有三轴力传感能力,具有宽测量范围、高分辨率(0.07 mN)、快速响应/恢复时间(0.85 ms/0.82 ms)以及高重复性与稳定性。此外,表面形态扫描和医学触诊的实验评估证明了该传感器的实际应用潜力。
论文链接:https://www.nature.com/articles/s41378-025-00998-0
延伸阅读:
上一篇:北京大学在触觉传感器方面取得进展,实现机器人指尖超分辨率力感知
下一篇:上海交大开发柔性离电式压力传感器,用于精准触觉交互