全温度范围MEMS陀螺仪的高精度解调相位误差识别与补偿
2026-03-20 09:02:53 来源:麦姆斯咨询 评论:0 点击:
该方法无需额外仪器,仅通过对MEMS陀螺仪的正交校正电极施加静电力,即可实现解调相位误差的识别。利用这种方法,可在全温度范围内对MEMS陀螺仪解调相位误差进行识别。重复实验证实了所识别相位误差的一致性,并通过测量补偿后的零偏输出进一步验证识别和补偿过程的准确性。
陀螺仪是惯性导航系统中用于测量角速度的关键部件。随着MEMS技术的进步,MEMS陀螺仪应运而生。由于具备成本低、体积小、功耗低以及可批量制造等优势,MEMS陀螺仪已被广泛应用于汽车电子、消费电子、工业控制、航空航天和军事国防等领域。基于科里奥利原理,MEMS陀螺仪通常采用静电驱动实现激励,并通过平行板电容或梳齿电容传感进行信号检测,其系统可建模为一个质量-弹簧-阻尼器二阶振荡器。当驱动模态达到稳定谐振振动,通过分析检测模态的输出响应即可确定输入角速度。
尽管MEMS陀螺仪具有诸多优势,但其性能仍然受到多种非理想误差的制约。典型的误差源包括频率分裂、刚度耦合和阻尼耦合。此外,值得注意的是,温度变化会改变MEMS陀螺仪的谐振频率和品质因数,进而使解调相位发生偏移并产生解调相位误差。
对现有方法的分析表明,电路中的解调相位误差会显著降低MEMS陀螺仪的零偏输出(ZRO)性能,因此需要进行有效的抑制。已有报道的研究主要侧重于相位误差补偿的结果,而对相位误差识别过程本身,尚未进行深入研究。
据麦姆斯咨询介绍,北京航空航天大学、浙江大学和南京理工大学的联合研究团队提出了一种高精度的相位误差识别方法。该方法无需额外仪器,仅通过对MEMS陀螺仪的正交校正电极施加静电力,即可实现解调相位误差的识别。利用这种方法,可在全温度范围内对MEMS陀螺仪解调相位误差进行识别。重复实验证实了所识别相位误差的一致性,并通过测量补偿后的零偏输出进一步验证识别和补偿过程的准确性。相关研究成果已经以“High-precision demodulation phase-error identification and compensation for MEMS gyroscopes over the full temperature range”为题发表于Measurement期刊。
该论文首先总体介绍了MEMS陀螺仪,并提供了与解调相位误差相关的研究背景。然后,概述了MEMS陀螺仪的工作原理,分析了电路引起的解调相位误差,并研究了解调相位的特性。
研究人员提出了一种基于科里奥利诱导等效角速度(CIR)和正交电压诱导等效角速度(QIR)的解调相位误差识别与补偿方法。并通过实验验证了所提方法,另外,还从补偿前后的相位重复性、零偏重复性和艾伦方差方面对四个陀螺仪进行了评估。
实验设置
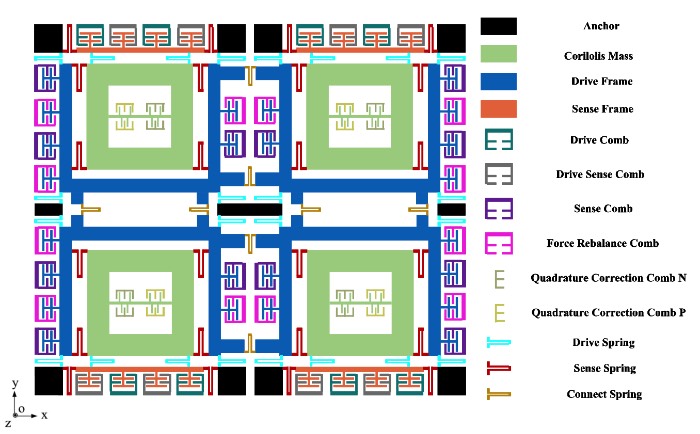
图1 MEMS四质量块陀螺仪结构示意图
该研究选取了四个四质量块陀螺仪(QMG)作为测试器件。其结构示意图如上图所示。每个QMG由四个相同的检测质量块组成,这些质量块通过柔性梁相互连接,并与驱动框架和检测框架相连。在工作过程中,内部耦合机制和外部杠杆结构的共同作用使检测质量块反向运动。检测模式采用差分电容检测,能有效抑制共模干扰。
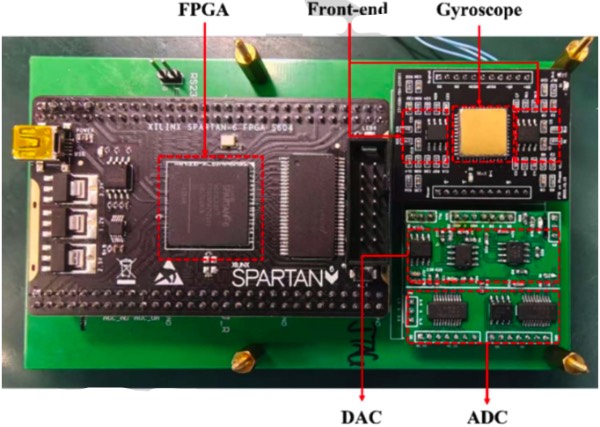
图2 MEMS四质量块陀螺仪电路板
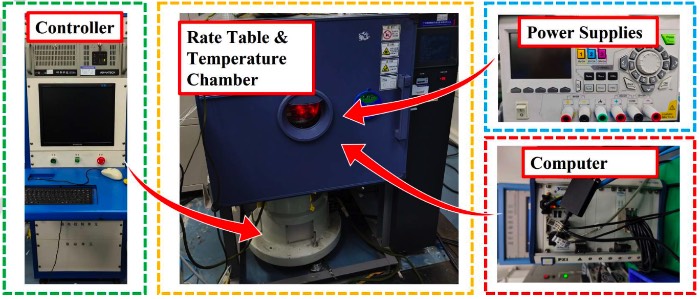
图3 实验装置
为了验证所提出方法的有效性,研究人员设计并制作了一块印刷电路板(PCB),集成了MEMS陀螺仪、前端电路、模数转换器(ADC)和数模转换器(DAC)。集成PCB如图2所示,实验装置如图3所示。该平台包括一个提供5V供电电压的直流电源、一台用于采集陀螺仪输出数据的计算机、一个由腔体控制器调节温度的恒温箱,以及一个由转台控制器控制转速的角速度转台。
全温度范围零偏输出的补偿结果
基于所提出的全温度范围相位误差识别方法,对两种方法识别出的相位误差进行了补偿,随后在相位补偿条件下开展了全温零偏输出测试。全温偏差补偿前后的偏差重复性如图4所示。
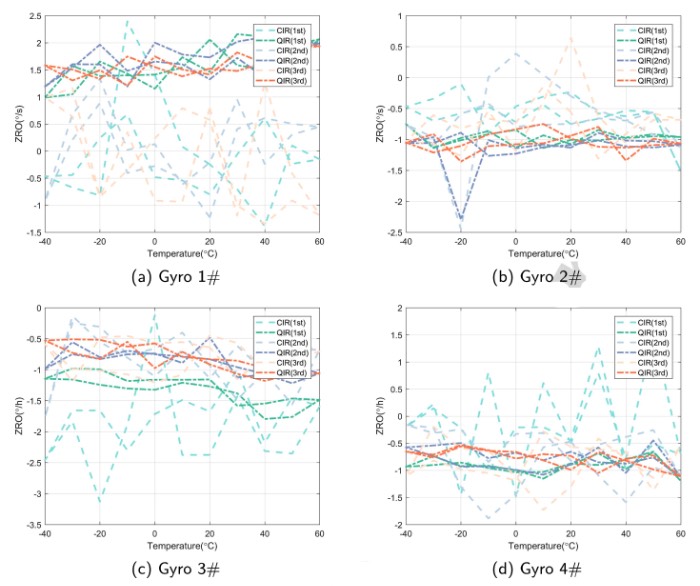
图4 使用CIR和QIR的四个陀螺仪在全温度范围内的三次偏差重复性
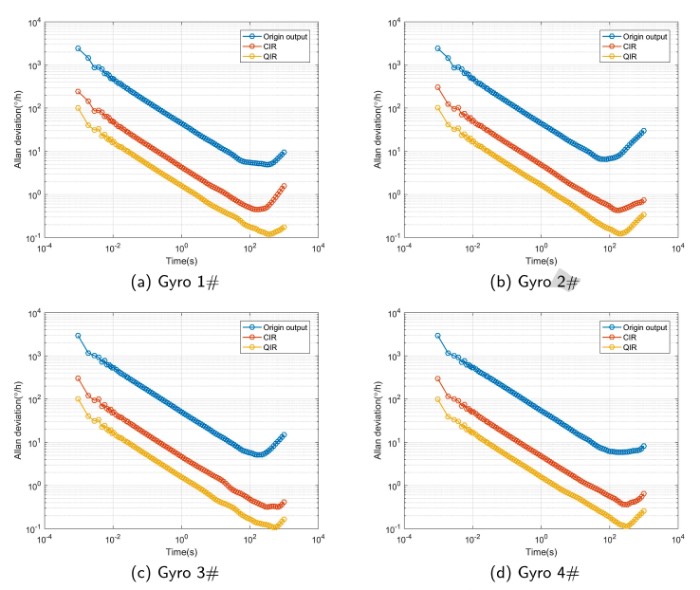
图5 补偿前后的艾伦方差对比
采用QIR进行解调相位误差补偿后得到的零偏输出小于采用CIR方法得到的结果。在三次重复实验中,采用QIR并进行补偿所获得的零偏输出重复性也优于CIR方法。
分析显示,采用QIR方法获得的零偏重复性始终低于采用CIR方法获得的零偏重复性。这一结论在所有三次重复实验中均得到验证。
结论
该研究报道了一种高精度解调相位误差识别方法。解调相位误差会引起阻尼-正交耦合,导致陀螺仪的驱动模式偏离其谐振频率,并增加所需的驱动电压振幅,最终降低零偏输出性能。因此,准确识别并补偿相位误差至关重要。
所提出的QIR高精度相位误差识别方法通过向正交校正电极施加等幅反极性的正交力来识别和补偿相位误差。这种方法具有更强的校正能力、更高的精度,以及对多种MEMS陀螺仪的广泛适用性。
实验结果表明,采用QIR的四个陀螺仪性能得到显著提升:相位补偿的均方根误差(RMSE)提高了54%-86%,补偿后的零偏重复性提升了35%-95%,零偏不稳定性(BI)提高了50%-75%,角度随机游走(ARW)提升了62%-69%。未来的进一步研究将重点开发能够在运行中自校准的高精度解调相位误差识别技术。
论文链接:https://doi.org/10.1016/j.measurement.2026.121150
延伸阅读:
《Sensonor MEMS惯性测量单元(IMU)STIM318产品分析》
《村田MEMS惯性测量单元(IMU)SCH1633产品分析》
《消费类MEMS惯性测量单元(IMU)产品对比分析-2022版》
《汽车级MEMS惯性测量单元(IMU)产品对比分析-2024版》