综述:集成光子陀螺仪(IPG)研究进展
2026-03-14 08:43:18 来源:麦姆斯咨询 评论:0 点击:
本文概述了集成光子陀螺仪(IPG)技术及其研究的最新进展,包括目前正在开发的多种IPG技术类型,例如波导螺旋型IPG、环形激光陀螺型IPG以及无源环形谐振腔型IPG等。
集成光子陀螺仪(IPG)凭借其高灵敏度、紧凑性、低功耗,以及有利于实现系统集成的优点,已成为其它类型陀螺仪的一种极具前景的替代方案。
据麦姆斯咨询报道,近期,北京航空航天大学与皇家墨尔本理工大学(RMIT University)的研究人员组成的团队在Electromagnetic Science期刊上发表了题为“Integrated Photonic Gyroscopes”的综述论文,概述了集成光子陀螺仪(IPG)技术及其研究的最新进展,包括目前正在开发的多种IPG技术类型,例如波导螺旋型IPG、环形激光陀螺型IPG以及无源环形谐振腔型IPG等。重点阐述了为提升IPG稳定性、精度和分辨率所开展的研究工作,例如采用窄线宽激光二极管以及构建高稳定、低噪声电源系统等技术方案;此外,还概述了IPG的关键性能指标,包括分辨率、漂移、稳定性以及噪声抑制能力,并讨论了这些指标之间的相互关系。最后,本文探讨了IPG研究面临的挑战及未来发展方向,包括提高长期稳定性以及降低对冲击和振动的敏感性等问题。
根据不同的工作原理,陀螺仪可分为机械陀螺仪、MEMS陀螺仪和光学陀螺仪。图1展示了不同陀螺仪技术的应用场景及性能要求。与机械陀螺仪和MEMS陀螺仪相比,光学陀螺仪具有高精度、长寿命、无运动部件、优异的抗冲击性能等优点。但光学陀螺仪由离散器件构成,其制造成本和功耗较高,难以满足普通消费电子应用的需求。

图1 不同陀螺仪技术的应用场景和性能要求
IPG利用波导中光波的干涉效应来测量角速度,从而实现高灵敏度、紧凑性和低功耗。与机械陀螺仪和MEMS陀螺仪相比,IPG具有更长的使用寿命、更高的精度和更好的稳定性。因此,IPG已成为传统机械陀螺仪的一种有前景的替代方案。将波导、调制器和探测器等光子器件集成到单一芯片上的技术,使得开发小体积、低功耗且具有高灵敏度和高带宽的IPG成为可能。
随着IPG技术的发展,研究者提出了基于不同材料平台的IPG方案,例如铌酸锂(LiNbO₃) 、聚合物材料、磷化铟(InP)、二氧化硅(SiO₂)、氮化硅(Si₃N₄)、氟化钙(CaF₂)以及绝缘体上硅(SOI)平台。
图2展示了IPG的发展时间线,其中包含了多种类型的IPG,例如波导螺旋型IPG、环形激光陀螺(RLG)型IPG以及无源环形谐振腔型IPG等。
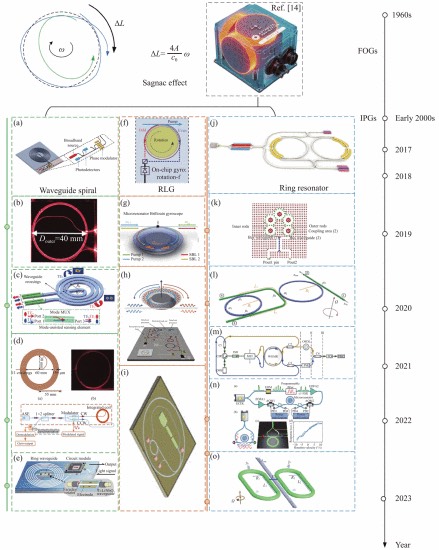
图2 集成光子陀螺仪(IPG)的发展时间线
波导螺旋型IPG
IPG的灵敏度取决于光纤线圈的长度,这也是限制其器件尺寸的主要因素之一。为了提高灵敏度并减小器件的占位面积,通常将光学波导设计为阿基米德螺旋(Archimedean spiral)结构。此外,通过使波导交叉点之间的间距大于相干长度,反射光只会在强度上叠加而不会在相位上叠加。图2(a)展示了一种在混合集成硅平台上提出的波导螺旋型IPG。该器件实现了8.52 °/√h的角随机游走(ARW)、58.7 °/h的零偏漂移以及19 °/h/√Hz的分辨率。2017年,Huffman团队设计了一种波导螺旋型IPG。他们测得0.0156 dB/crossing的波导交叉损耗,与仿真结果高度一致,如图2(b)所示。该波导螺旋IPG的ARW可达到69 °/h/√Hz,同时波导损耗约为0.58 dB/m。
随后,通过利用在波导传感线圈中以相反方向传播的两种不同空间模式,研究人员设计了一种片上SOI IPG。如图2(c)所示,这两种反向传播的空间模式会产生一个固定的相位差,从而使IPG能够对角速度实现高灵敏度检测。此外,该IPG无需相位调制器和环行器,因此显著降低了系统复杂度。另一方面,SiO₂作为光学波导材料受到了广泛研究。基于此,研究人员提出了一种基于集成SiO₂波导线圈的干涉型光学陀螺仪,其性能如图2(d)所示,实现了7.32 °/h的零偏漂移以及1.26 °/√h的ARW。在后续研究中,某研究团队从理论和实验两个方面提出并分析了一种新型超短线圈光纤陀螺结构。如图2(e)所示,该结构从根本上克服了传统干涉型光纤陀螺受时间和本征频率限制的缺点。这一方法为波导螺旋型IPG的研究开辟了新的方向。
环形激光陀螺型IPG
环形激光陀螺(RLG)利用萨格纳克效应(Sagnac effect)来测量角速度。其工作原理是在一个封闭的环形腔中注入激光,使光束沿顺时针和逆时针两个方向传播。当系统发生旋转时,由于萨格纳克效应,两束光的传播时间会发生变化,从而产生相位差。通过测量这一相位差即可计算旋转的角速度。该相位差与光程长度、旋转速度以及激光波长等参数相关,因此RLG具有高精度和高稳定性。2017年,Vahala团队展示了一种基于直径18 mm的高Q值微环谐振腔的RLG。该装置利用单一泵浦源触发级联布里渊激光,从而测量萨格纳克效应引起的频率偏移。如图2(f)所示,该IPG在实验配置下实现了15 °/h/√Hz的灵敏度。两年后,该团队又提出了一种在异常点(exceptional point)附近工作的RLG,如图2(g)所示。在这种工作状态下,多个本征态会发生合并(coalescence),从而显著增强器件对旋转的响应。他们通过匹配布里渊增益与谐振腔色散相位,实现了对反向传播激光模式的精确调控,最终观察到萨格纳克比例因子提高约四倍。随后,如图2(h)所示,研究人员实现了一种集成在硅芯片上的RLG,用于高灵敏度测量地球自转速率。该RLG实现了0.068 °/√Hz的ARW噪声以及3.6 °/h的零偏漂移。2020年,Honeywell团队提出了一种基于芯片级SiO₂/Si₃N₄平台布里渊激光的环形激光陀螺型IPG,如图2(i)所示。该器件实现了0.06 dB/m的传播损耗,并能够有效抑制高阶受激布里渊散射(SBS)以及谐振腔中的散射损耗。
环形谐振腔型IPG
环形谐振腔型IPG利用微环谐振腔和萨格纳克效应来测量旋转。来自激光光源的光首先通过光学耦合器分成两束,其频率由两个相位调制器进行调控。当陀螺仪发生旋转时,两束沿相反方向传播的光的光程会产生差异,从而由于萨格纳克效应导致反向传播光之间出现谐振频率差。通过检测这一谐振频率差,即可计算并获得旋转角度和角速度。与波导螺旋型IPG和环形激光陀螺型IPG相比,环形谐振腔型IPG通常具有更小的占位面积和更低的功耗,因此这种类型的IPG更有利于实现集成化。
2018年,Khial团队利用互易灵敏度增强设计并实现了一种环形谐振腔型陀螺仪。如图2(j)所示,该IPG实现了1 r.p.m的零偏以及650 °/√h的ARW。此外,一些研究人员还提出了一种基于自注入锁定技术的高灵敏度RLG。该方法通过增强互易性并测量拍频来实现角速度检测并提高灵敏度。图2(m)显示,在6 kHz调制频率下,该RLG的理论灵敏度可达到10⁻⁴ °/h。
在后续研究中,如图2(k)所示,研究人员提出了一种基于光子晶体环形谐振腔(PCRR)的无源相位敏感集成光学陀螺(IOG)。该IOG由两条总线波导和五个环形谐振腔组成。通过采用不同半径和折射率的环形谐振腔来提高耦合效率,并通过计算端口的传输效率来获得角速度。
2019年,Carlo等人提出了反宇称时间(APT)对称光学陀螺仪的概念与设计方案,该装置表现出与器件尺寸无关的共振分裂,如图2(l)所示。与此前提出的宇称时间(PT)对称陀螺仪相比,该方案能够产生真正的频率分裂,并且可以在输出功率谱中直接进行测量。此外,该系统还能比PT对称结构更精确地保持在其异常点附近。三年后,该研究团队首次在InP平台上设计了一种新型APT对称IPG,其结构为谐振腔–总线–谐振腔,如图2(o)所示。与其他APT对称陀螺仪相比,该结构仅使用一条辅助波导(中央总线)即可实现更好的鲁棒性。
展望未来,IPG领域正迎来一系列令人振奋的发展机遇。这些进展将主要由材料科学、纳米制造技术以及集成光学等领域的创新推动。随着纳米制造技术在高精度与微型化方面的持续突破,IPG的性能边界将不断被拓展,使其在保持更小体积的同时具备更高精度。这一演进将使IPG能够广泛应用于多种领域,从消费电子产品到自动驾驶汽车,甚至空间探索。
综上所述,研究团队阐述了集成光子陀螺仪(IPG)技术及相关研究的最新进展,重点介绍了已经发展出的多种IPG类型,包括波导螺旋型IPG、环形激光陀螺型IPG以及无源环形谐振腔型IPG,并分析了它们各自的优势与局限。同时,重点介绍了在提升IPG稳定性、精度和分辨率方面取得的进展,以及将IPG与其它器件集成以构建紧凑型、低功耗导航系统的研究方向。此外,本综述还讨论了当前仍需解决的一些挑战,例如提高IPG的长期稳定性,并展望了IPG未来可能的发展方向。
论文信息:DOI: 10.23919/emsci.2024.0026
延伸阅读:
《村田MEMS惯性测量单元(IMU)SCH1633产品分析》
《消费类MEMS惯性测量单元(IMU)产品对比分析-2022版》
《汽车级MEMS惯性测量单元(IMU)产品对比分析-2024版》
相关热词搜索:陀螺仪
上一篇:可替代光纤陀螺仪的MEMS陀螺仪,有望掀起一场惯性传感器革命
下一篇:国防系统中的MEMS陀螺仪技术:应用导向视角及新分析结果