国防系统中的MEMS陀螺仪技术:应用导向视角及新分析结果
2026-03-14 15:00:25 来源:麦姆斯咨询 评论:0 点击:
该研究为各领域的MEMS陀螺仪从业者,特别是从事导航与控制(GNC)系统相关工作的人员,提供了一份全面的教程。
陀螺仪技术迄今取得了显著发展,根据其工作原理主要可分为四个类别:机械陀螺仪、振动陀螺仪、光学陀螺仪和原子陀螺仪。其中,MEMS陀螺仪已成为应用最广泛且在商业上占主导地位的类型。作为振动陀螺仪的一个子类别,MEMS陀螺仪因其体积小、成本低、可靠性高以及可扩展性而被广泛应用。这些特性加上合理的成本,使得MEMS技术成为许多先进制导、导航与控制(GNC)系统的首选。
然而,由于其固有的复杂性,MEMS陀螺仪的参数通常比传统传感器多出达十倍,这使得即使是专家在选型时也面临挑战。据麦姆斯咨询介绍,谢里夫理工大学的研究人员针对这一挑战,聚焦精确、可靠角速度测量对整体性能至关重要的导航与控制系统,引入了一个全面的数学模型来涵盖所有关键的MEMS陀螺仪参数,并对校准和艾伦(Allan)方差解释进行了探讨。该研究旨在为各个领域的从业者提供指引,帮助他们做出更明智的设计决策。相关研究成果已经以“MEMS gyroscope technology in defence systems: An application-oriented perspective with new analytical results”为题发表于Defence Technology期刊。
现有MEMS陀螺仪模型主要可分为两类。第一类依赖于利用牛顿第二定律的详细物理建模;而在第二类中,传感器被视为一个黑箱,通过统计或机器学习技术为其构建基于经验数据的模型。对于后者,为了表征随机行为,统计时域(如艾伦方差)或频域(如功率谱密度)技术被广泛应用。对于某些应用,例如误差的主动补偿(如减少传感器漂移、偏差或噪声),制造商通常通过反馈机制采用第一类模型。
该研究聚焦了第二类模型,因为它们更适用于MEMS陀螺仪的终端用户。系统设计人员可以通过两种主要方式从精确模型中受益。首先,它有助于评估使用MEMS传感器的复杂系统的性能,以确保满足设计要求。其次,它有助于实施精确的校准程序,从而优化传感器精度并减少实际应用中的误差。受到广泛关注的MEMS陀螺仪参数包括带宽、非线性、漂移、运行中偏差稳定性、比例因子、轴对准、动态范围、共振频率、品质因数、温度依赖性和抗振性等。
当工程师需要为特定应用选择合适的传感器时,需要面对的主要挑战就来了。鉴于典型MEMS陀螺仪产品目录中呈现的参数可能比传统传感器多十倍,关键问题就变成了应该优先考虑哪些参数。遗憾的是,成本并非可靠的指标,经验表明,在某些情况下,高成本的传感器在特定应用中有时会失效,而更经济实惠的替代品却能成功完成任务。为解决这一问题,有必要深入研究MEMS陀螺仪的复杂参数,以确定最适合特定应用的传感器。该研究聚焦GNC系统,旨在通过提供关键见解和指导方针来应对这一挑战,帮助工程师选择合适的MEMS陀螺仪。这也有助于设计师以应用为导向,在集成模型的精度和精简性之间取得合理平衡。
建模误差源
首先,研究人员详细阐述了MEMS陀螺仪中的各种误差源,并将其整合到一个新颖、全面的模型中。这个新模型通过在一个连贯的框架中结合多个误差因素,提供了一种独特的方法,有助于更深入地理解MEMS陀螺仪的特性。此外,还介绍了一个简化的校准模型,并提供了解读艾伦方差图的实用指南。
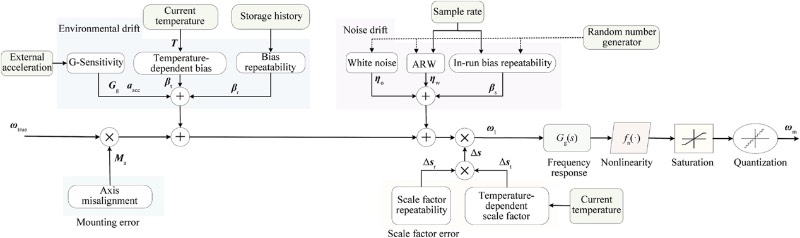
图1 一个全面的3轴MEMS陀螺仪模型
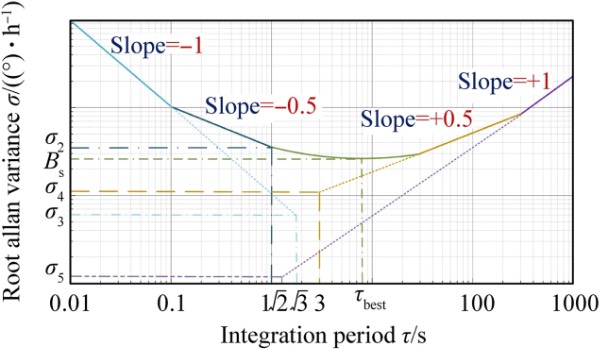
图2 典型MEMS陀螺仪的艾伦方差图
捷联惯性导航系统误差评估的经验法则
鉴于MEMS陀螺仪在现代导航应用中所扮演的关键角色,研究人员重点评估了其对短期导航性能的影响。尽管导航误差在很大程度上取决于载具的机动动作,但通过非线性导航方程,六自由度(6-DoF)仿真分析为评估这些误差提供了精确的方法。然而,对于从业者而言,尤其是在系统设计的早期阶段,运用经验法则来估算各个传感器误差如何影响载具的估计姿态、位置和速度是很有帮助的。
该研究首先介绍了通用导航方程,随后对其进行简化,以推导出了用于传感器误差分析的实用经验法则。
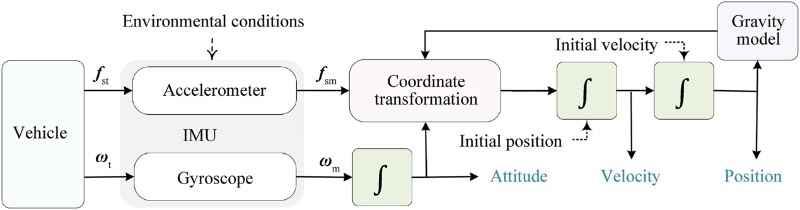
图3 纯惯性捷联导航系统的通用框图
应用导向的MEMS陀螺仪选型
对于每种特定应用,某些传感器参数至关重要。在该章节中,研究人员重点介绍了六种GNC应用相关的MEMS陀螺仪关键参数。市场上存在各种不同规格和价格的传感器。有趣的是,某款传感器的总体规格可能较差,但由于在特定应用的关键参数上表现出色,它仍可能更受青睐。关于惯性传感器的分类,目前尚无普遍共识。为了更清晰地说明,研究人员列出了不同等级的MEMS陀螺仪示例,重点展示了动态范围、零偏不稳定性、标度因数稳定性和角随机游走等关键参数,并按价格从低到高进行了排列。
表1 不同等级单轴MEMS陀螺仪示例,及其关键参数和大致价格
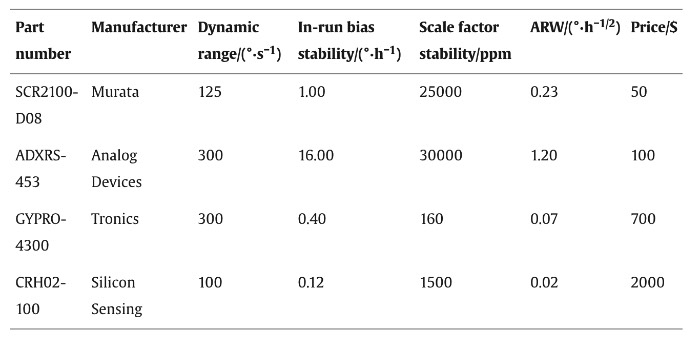
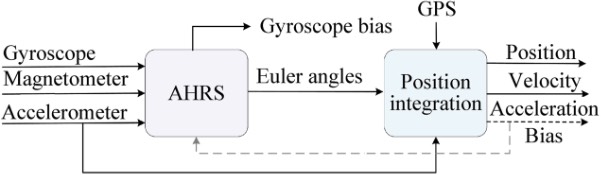
图4 户外无人机的标准导航系统,MEMS陀螺仪通常用作航姿参考系统算法中姿态确定的关键传感器
仿真分析
该章节研究人员通过仿真分析评估了目前市场上几款知名MEMS陀螺仪的优缺点。这些分析聚焦于四个基本应用,包括静态导航、多旋翼姿态估计、万向节机构的线性自抗扰控制(ADRC)以及精确寻北。
结论
该研究为各领域的MEMS陀螺仪从业者,特别是从事导航与控制(GNC)系统相关工作的人员,提供了一份全面的教程。首次详细介绍了关键的MEMS陀螺仪参数,并将其整合到一个统一的数学模型中。为在精度和精简性之间取得平衡,还提供了一个用于校准的简化模型,以及关于如何调整艾伦方差图的实用指导。
该研究基于6-DoF方程进行了深入分析,推导出静态和旋转平台中的纯惯性导航误差,得出了用于误差评估的实用经验公式。这些公式在文献中首次专门针对MEMS传感器误差进行了定制。
研究人员深入探讨了六个与GNC相关的关键应用,包括静态导航、动态姿态估计、飞行器自动驾驶、旋转弹体、寻的制导系统以及精确寻北。针对每个应用,确定了关键参数,强调了一个重要见解:传感器的价格并不能可靠地反映其对整个系统性能的影响。
最后,该研究通过在多种实际场景中的仿真分析,包括静态导航、多旋翼姿态估计、万向节机构的线性自抗扰控制(ADRC)以及精确寻北,在每个场景中都给出了独特的启示和发现,为GNC从业者提供了传感器选择方面的宝贵见解。
论文链接:https://doi.org/10.1016/j.dt.2025.08.005
延伸阅读:
《村田MEMS惯性测量单元(IMU)SCH1633产品分析》
《消费类MEMS惯性测量单元(IMU)产品对比分析-2022版》
《汽车级MEMS惯性测量单元(IMU)产品对比分析-2024版》
相关热词搜索:陀螺仪
上一篇:综述:集成光子陀螺仪(IPG)研究进展
下一篇:最后一页