面向未来机器人嗅觉的先进电子鼻
2026-01-25 14:40:51 来源:麦姆斯咨询 评论:0 点击:
本文首先系统梳理了电子鼻的最新进展,对比分析了用于电子鼻的各类气体传感器及其适配机器人的特性,并强调了算法演进对提升气体源定位性能的关键作用;接着展示了电子鼻在搜索救援、环境监测、医疗保健等领域的多样化应用;最后分析了机器人嗅觉技术发展面临的机遇与挑战。
随着机器人不断被部署到复杂多变的环境中,气味检测和解读能力变得愈发关键,机器人嗅觉的重要性也日益凸显。电子鼻(e-nose)有望在未来机器人嗅觉领域发挥关键作用,显著提升机器人的环境感知与决策能力。
据麦姆斯咨询报道,针对该领域研究,香港科技大学范智勇教授团队在npj Robotics期刊上发表了题为“Advanced electronic noses for future robotic olfaction”的综述文章,首先系统梳理了电子鼻的最新进展,对比分析了用于电子鼻的各类气体传感器及其适配机器人的特性,并强调了算法演进对提升气体源定位(GSL)性能的关键作用;接着展示了电子鼻在搜索救援、环境监测、医疗保健等领域的多样化应用;最后分析了机器人嗅觉技术发展面临的机遇与挑战,为未来发展方向提供了见解,旨在推动机器人嗅觉系统向更精密、高效且适应性强的方向演进。
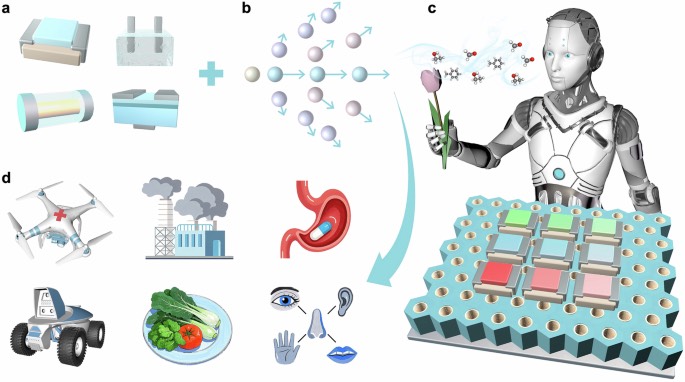
图1 应用于机器人的电子鼻
用于机器人嗅觉的气体传感器
机器人嗅觉的核心是电子鼻——一种模拟人类鼻子功能的系统。电子鼻通常由气体传感器阵列与先进算法共同构成。随着材料与结构设计的不断进步,电子鼻采用的气体传感器类型也在不断丰富,例如金属氧化物半导体(MOS)传感器、电化学(EC)传感器、光学传感器以及场效应晶体管(FET)传感器等。除上述主流类型外,还有催化型、石英晶体微天平(QCM)型、电容型等专用气体传感器,可覆盖更细分的特定应用需求,从而提升机器人嗅觉系统的通用性。不同类型的气体传感器通过独特机理与气体分子相互作用,在灵敏度、选择性、便携性、稳定性与功耗等方面各具优势,因此适用于不同的任务场景。
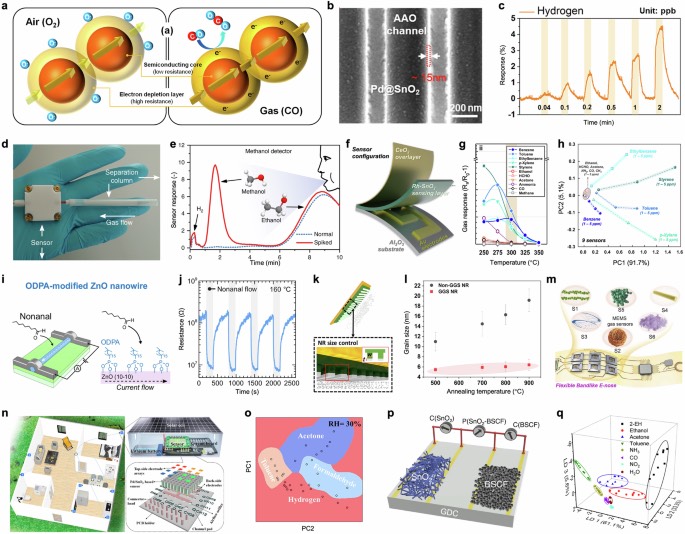
图2 MOS气体传感器
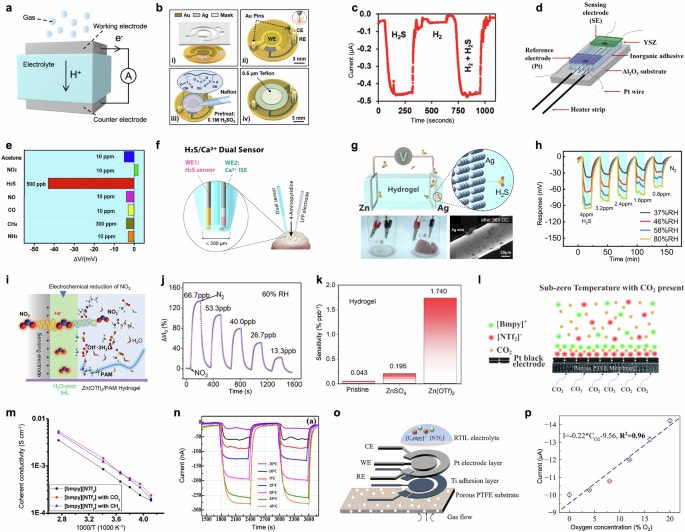
图3 电化学气体传感器
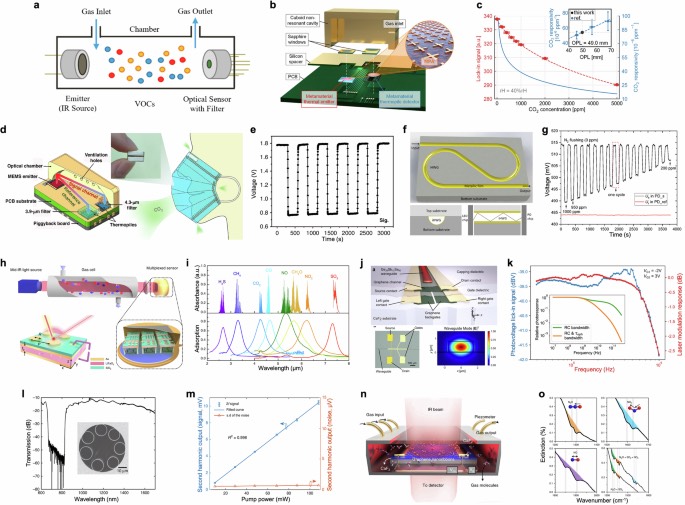
图4 光学气体传感器
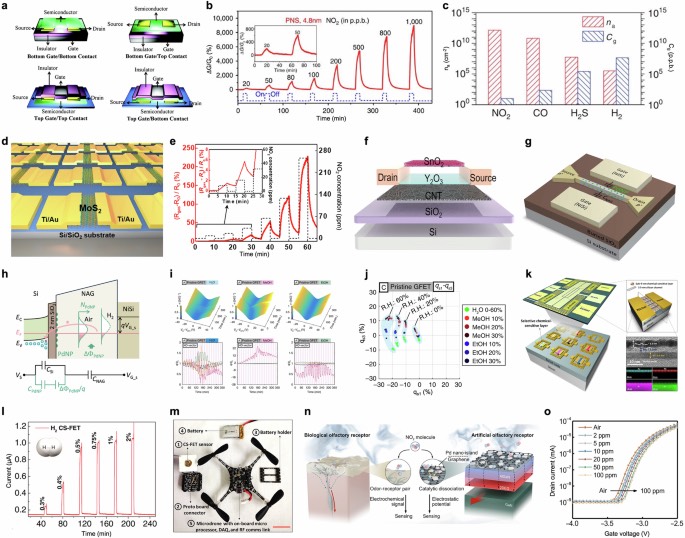
图5 FET气体传感器
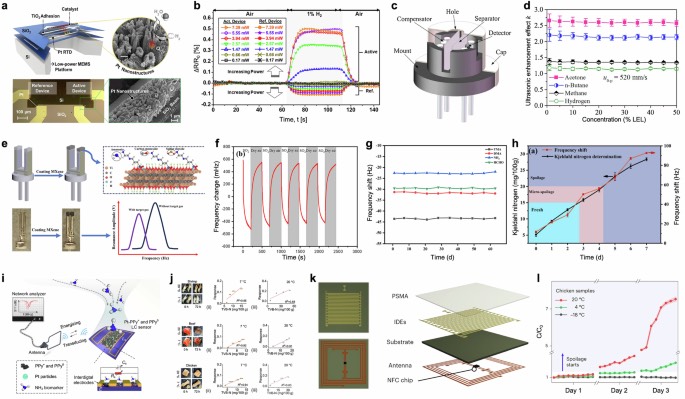
图6 其它类型的气体传感器
机器人气体源定位算法
电子鼻能够提供气体检测与识别的实时感知输入,但在机器人应用中,面对气味羽流发现、羽流跟踪以及气体源确认等复杂过程,仅依靠电子鼻本身往往难以处理多环境、多扰动条件下的计算与决策需求。为此,研究者提出了多种气体源定位算法,通常可归为三大方向:受生物行为启发的仿生方法、多机器人协同方法以及基于贝叶斯推断的概率策略。这些算法通过将传感数据与计算模型结合,旨在提升机器人气体源定位的效率与可靠性。
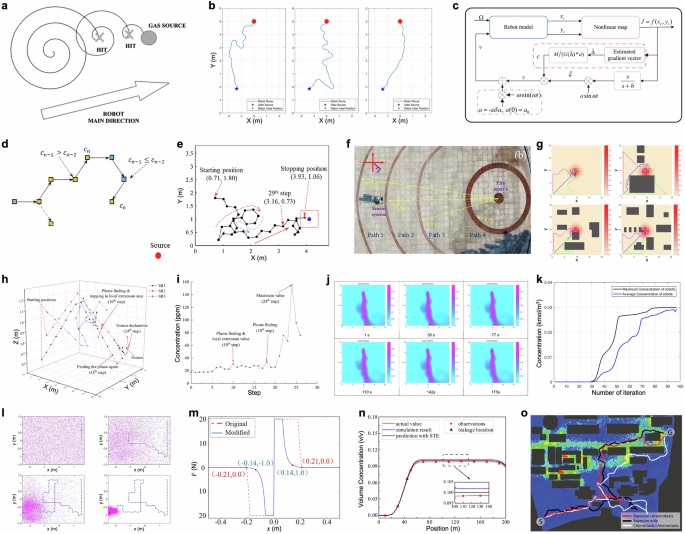
图7 机器人气体源定位算法
电子鼻在机器人中的应用
通过集成能够检测、识别和分析气味的电子鼻,机器人嗅觉技术取得了快速发展,使机器人能够像生物体一样利用化学线索与环境交互。针对目标任务优化材料选择、器件架构与工作模式后,电子鼻在机动性、鲁棒性与算法导航适配性方面均得到显著提升。与此同时,从仿生搜索到湍流扩散概率建模的各类气体源定位方法,也将这些能力拓展至真实场景部署。因此,机器人嗅觉正日益广泛地应用于搜索救援、环境监测、医疗保健、气体定位与导航、多模态学习以及家用类人机器人等领域。
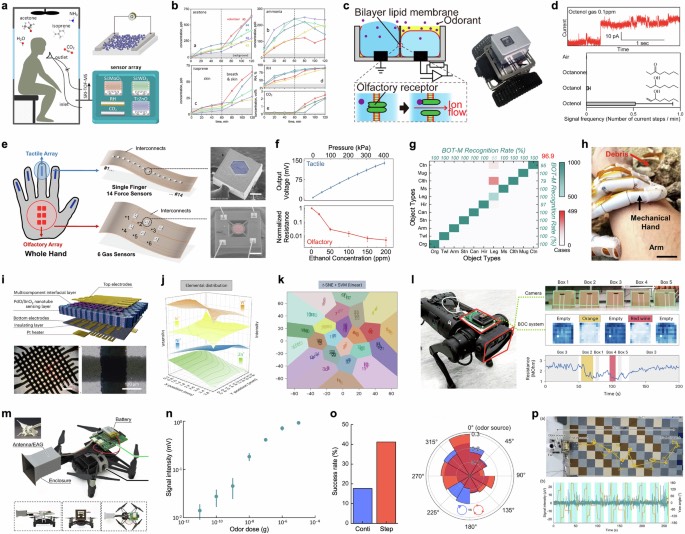
图8 机器人嗅觉用于搜救行动
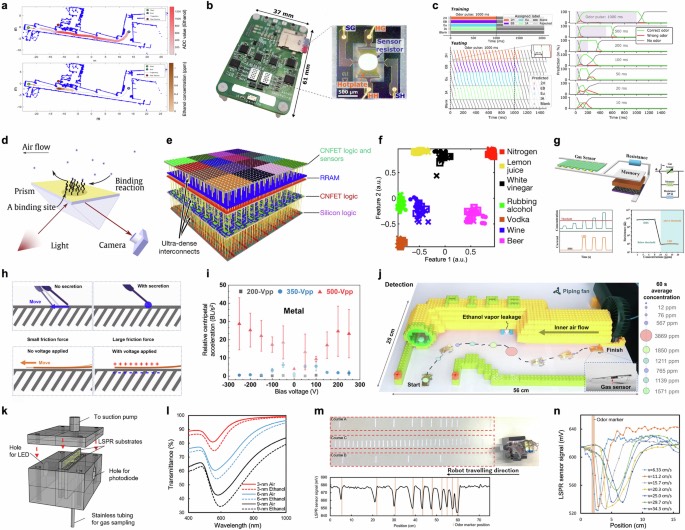
图9 机器人嗅觉用于环境监测
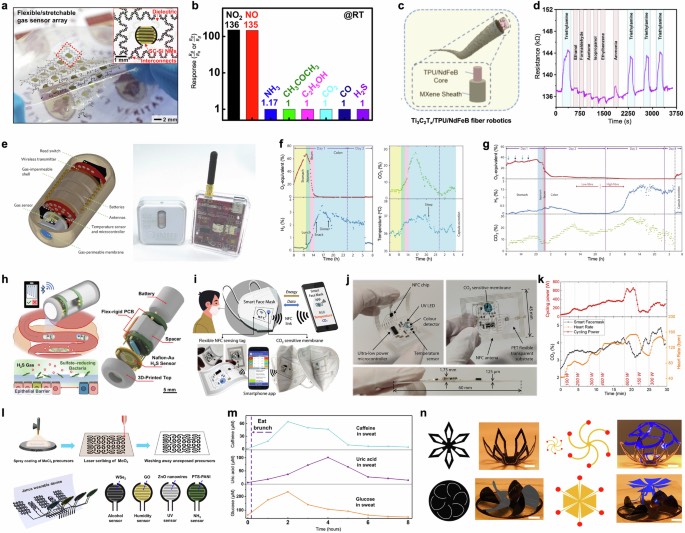
图10 机器人嗅觉用于医疗保健
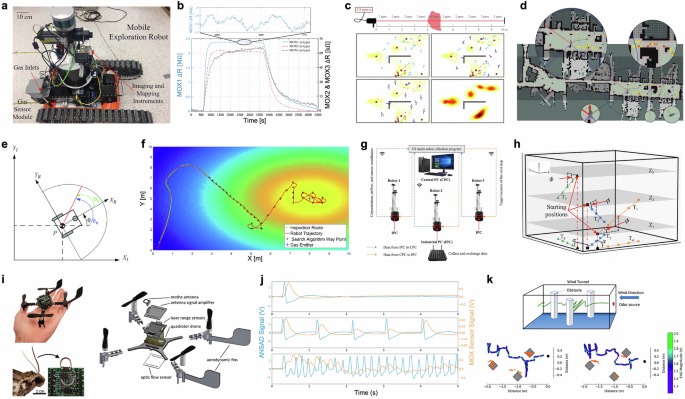
图11 机器人嗅觉用于气体源定位与导航
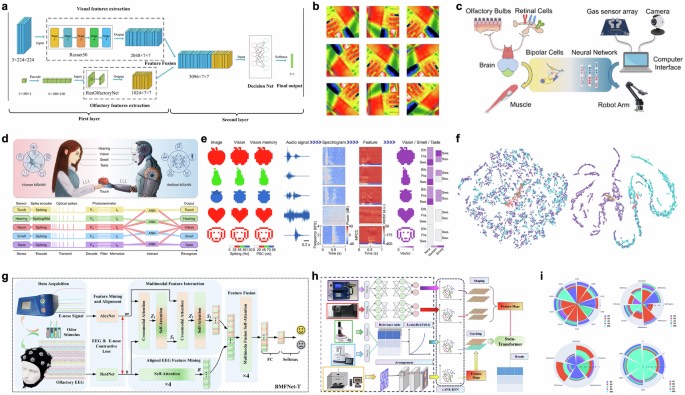
图12 机器人嗅觉用于多模态学习
挑战与前景
为机器人配备气体感知能力,相当于赋予其“人工嗅觉”模态,有望推动环境监测、搜索救援、工业巡检与医学诊断等领域的技术进步。然而,将实验室电子鼻原型转化为稳健、可部署的机器人嗅觉系统产品并非易事。
(1)传感器与电子鼻面临的挑战
目前,在感知层的挑战主要源自传感器的基础性限制,未来发展关键在于构建系统级方案,在灵敏度、选择性、稳定性、响应速度与计算效率之间实现更优平衡。重点研究方向包括:
- 先进材料与小型化:开发石墨烯、金属有机框架(MOFs)等多功能纳米材料,实现更高灵敏度、更快响应/恢复速度及更低功耗;利用MEMS技术实现传感器小型化与阵列化,以便在机器人上进行多点部署。
- 混合异构阵列:将互补传感模态(金属氧化物半导体、光学、电化学、石英晶体微天平、光离子化检测器)与环境传感器(温湿度传感器、风速计)集成,通过异构数据融合缓解选择性不足的问题,并降低环境扰动的影响。
- 智能信号处理:推进人工智能(AI)算法,以高效处理高维信号、预测并校正传感器漂移、在线适应动态条件,并确保在嵌入式硬件上高效运行。
(2)机器人集成面临的挑战
将高性能气体传感器转化为可靠、可部署的机器人嗅觉系统,不仅需要卓越的传感器性能,还需要在硬件、软件和任务流程之间进行紧密的协同设计。目前,机器人嗅觉系统的集成在传感器物理特性、移动平台和任务流程的交叉领域面临诸多挑战。核心问题包括小型化与性能的权衡、移动载体上的主动采样优化、有限边缘计算资源下的延迟与同步控制、羽流感知导航与三维覆盖、规范化多模态融合与映射,以及面向实际部署的系统加固设计。未来的进展将依赖于协同设计方法:
- 智能小型化:开发集成传感器阵列、信号调理和预处理功能的低功耗模块,实现即插即用部署。
- 气动同步主动嗅探:利用计算流体动力学(CFD)引导进气口布局,结合微泵/阀门和快速预浓缩器,优化空气采样效果。
- 时序感知与资源高效处理:构建能够对传感器滞后特性建模的系统,对齐多速率数据流,并利用轻量人工智能技术实现边缘计算。
- 三维、物理约束路径:整合风力与传输模型,结合快速替代仿真,实现实时机载决策。
总而言之,未来,机器人嗅觉技术的突破需优先提升气体传感器的灵敏度、选择性与稳定性,同时实现小型化与节能化。借助自适应算法和多模态传感器融合技术,机器人将能够实现更精确、实时的气味检测与追踪。这些进步将推动集成电子鼻的机器人成为工业和家庭中不可或缺的工具,更好地应对动态真实环境中的复杂任务。
论文信息:https://doi.org/10.1038/s44182-025-00071-y
延伸阅读:
上一篇:晶圆级自封装MEMS红外发射器:高发射率、高可靠性
下一篇:最后一页