第47期“见微知著”培训课程:MEMS惯性传感器
2022-10-24 22:04:00 来源:麦姆斯咨询 评论:0 点击:
惯性传感器是一类基于惯性及相关测量原理将物体运动量转换成电信号的装置,包括加速度计、陀螺仪及其组合式传感器,主要用于检测加速、旋转、振动、冲击、倾斜。MEMS技术引领惯性传感器进入“小尺寸、低成本、高集成度、多功能、智能化”的新时代。
主办单位:麦姆斯咨询
协办单位:上海传感信息科技有限公司
一、课程简介
惯性传感器是一类基于惯性及相关测量原理将物体运动量转换成电信号的装置,包括加速度计、陀螺仪及其组合式传感器,主要用于检测加速、旋转、振动、冲击、倾斜。惯性传感技术多种多样,以陀螺仪为例,包括机械陀螺仪、环形激光陀螺仪(RLG)、光纤陀螺仪(FOG)、半球谐振陀螺仪(HRG)、MEMS陀螺仪、硅光子光学陀螺仪(SiPhOG)、量子陀螺仪等。其中,MEMS技术引领惯性传感器进入“小尺寸、低成本、高集成度、多功能、智能化”的新时代。如今,MEMS惯性传感器无处不在:从“智能手机和平板电脑”到“可穿戴设备和体感游戏机”,从“工业控制和振动监测”到“无人机和汽车”,从“航空航天”到“国防军工”……
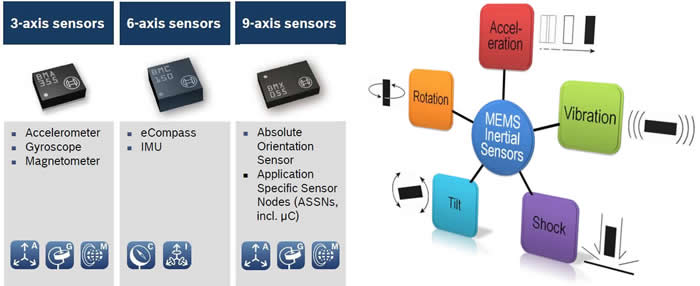
左:博世MEMS惯性传感器产品示例;右:MEMS惯性传感器主要用于检测五类运动
目前,分立式惯性传感器市场趋于饱和、价格不断侵蚀,而组合式惯性传感器市场蓬勃发展。以博世(Bosch)、意法半导体(STMicroelectronics)、TDK InvenSense为代表的全球领先MEMS惯性传感器厂商持续开发组合式惯性传感器产品,例如:3轴加速度计与3轴陀螺仪组合为6轴惯性测量单元(IMU),参考报告《消费类MEMS惯性测量单元(IMU)产品对比分析-2022版》;3轴加速度计+3轴磁力计组合为6轴电子罗盘(eCompass)。组合式传感器拥有一些分立式传感器无法比拟的优势,例如:采用同一颗ASIC(专用集成电路)处理信号,并将多个传感器芯片封装在一起,可降低成本;如果两种传感器芯片工艺相同或相近,可以做成单芯片,极大减小传感器尺寸;将滤波、数据融合和人工智能(机器学习)等算法集成,提高产品附加值,竞争对手难以模仿。
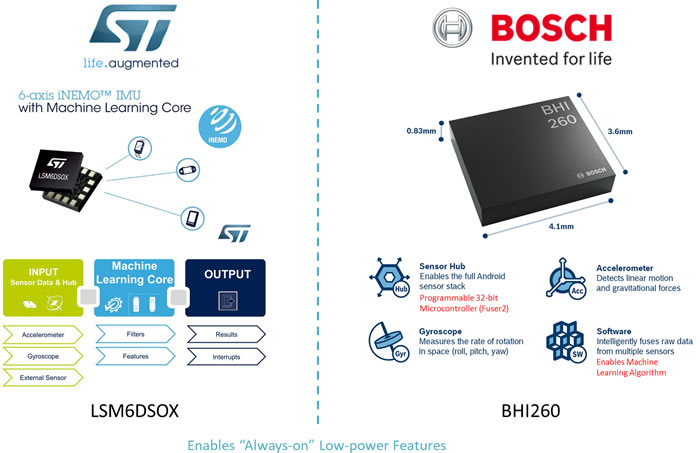
意法半导体和博世的新战略:惯性传感器+人工智能⇒智能传感器
意法半导体于2022年推出智能传感器处理单元(Intelligent Sensor Processing Unit,ISPU),在MEMS惯性传感器内部进一步整合数字信号处理器(DSP)和人工智能算法,为系统级封装(SiP)器件注入本地决策,同时显著节省空间和功耗,并通过将数据保持在本地增强隐私安全性。ISPU在四个“P”方面提供了实质性的优势:功耗(Power Consumption)、封装(Packaging)、性能(Performance)和价格(Price),助力各种终端实现边缘智能,而无需唤醒系统或将数据传输到MCU和网关/云端。借助ISPU分析惯性传感数据,能够确保活动识别和异常检测等任务的准确性和高效率。
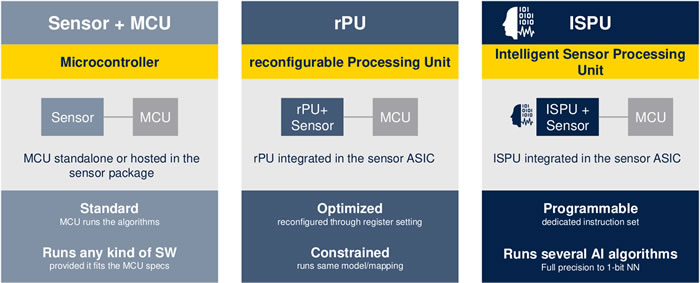
意法半导体将ISPU集成于惯性传感器ASIC,实现边缘智能数据处理
高端惯性传感器涉及众多应用领域,例如:单轴、低成本配置用于工业控制;多轴、高集成度、高性能配置用于航空航天和军事国防。高端组合式惯性传感器通常嵌入多种算法,以惯性测量单元(IMU)、垂直参考单元(VRU)、姿态和航向参考系统(AHRS)和惯性导航系统(INS)等形式出现。2021年全球高端惯性传感器(模组级)市场超过31亿美元,预计2027年将达到45亿美元。军事现代化、国防“定位、导航和授时(PNT)”等传统市场,以及商业太空应用、机器人技术、工业自动化、自动/无人驾驶汽车等新兴市场推动高端惯性系统市场发展。
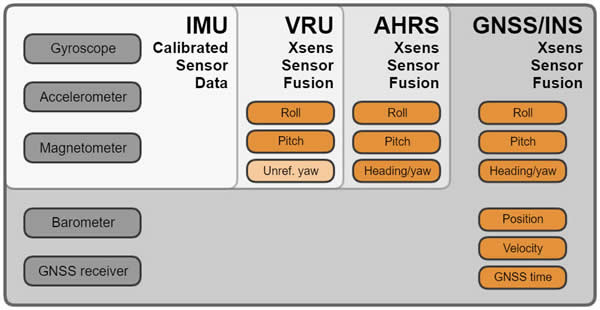
IMU、VRU、AHRS、INS功能结构图示例(来源:Xsens)
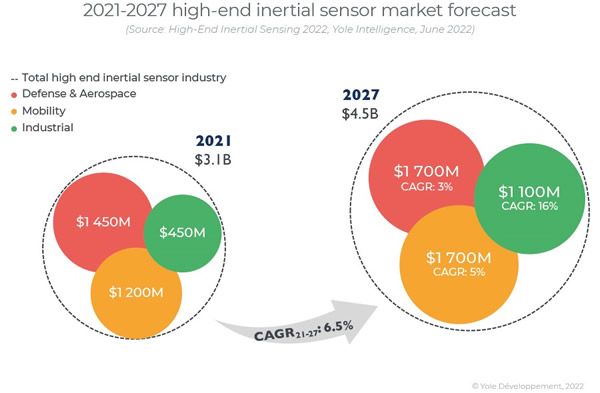
2021~2027年高端惯性传感器市场(来源:Yole)
高端惯性传感器应用领域分散,但市场份额却集中于三大知名巨头:霍尼韦尔(Honeywell)、诺斯洛普·格鲁曼(Northrop Grumman)和赛峰(Safran)。许多较小的厂商专注于特定的技术、市场和应用,难以与巨头正面交锋。尽管竞争格局多年来一直保持稳定,但在过去几年中的投资和并购速度加快,例如:赛峰(Safran)于2021年收购MEMS惯性传感器厂商Sensonor,并于2022年将Colibrys与Sensonor合并为赛峰传感(Safran Sensing);ECA集团于2022年收购高端惯性传感器制造商iXblue,双方合并为ECA-iXblue集团。此外,以Anello、OSCP为代表的初创公司正在募集资金以开发基于硅光集成技术的光学陀螺仪。
为了把握惯性传感器产业及技术趋势,满足广大从业人员对知识的渴求,麦姆斯咨询特开设本次培训课程,邀请著名高校与研究院所的专家和学者,为大家讲授:(1)高端MEMS惯性传感器综述;(2)多轴MEMS惯性传感器;(3)高精度MEMS加速度计技术详解;(4)基于加速度计的振动监测与故障诊断;(5)双质量线振动(音叉式)MEMS陀螺仪;(6)高精度固体波动(环形)MEMS陀螺仪;(7)基于声光效应的行波陀螺仪;(8)MEMS陀螺仪真空封装技术;(9)基于MEMS陀螺仪的寻北定向关键技术;(10)MEMS惯性传感系统设计及应用;(11)MEMS惯性传感器可靠性分析。
二、培训对象
本课程主要面向MEMS惯性传感器产业链上下游企业的技术人员和管理人员,以及高校及科研院所师生,同时也欢迎其他希望了解惯性传感器的非技术背景人员参加,如销售和市场人员、投融资机构人员、政府管理人员等。
三、培训时间
2022年11月18日~11月20日
授课结束后,为学员颁发麦姆斯咨询的结业证书。
四、培训方式
线上直播课程和答疑。
五、课程内容
课程一:高端MEMS惯性传感器综述
老师:中国科学院空天信息创新研究院 研究员 邹旭东
高端惯性传感器通常具有较高的关键性能指标(例如零偏稳定性),并且能够稳定工作数十年,主要面向航空航天和军事国防,不过产品价格昂贵,限制了其应用领域。随着MEMS技术的兴起,以较低的成本批量生产高端惯性传感器成为可能,高端MEMS陀螺仪也逐步在某些工业和战术应用中取代光纤陀螺仪、环形激光陀螺仪。近些年,以低成本和高性能集成的新功能驱动了MEMS惯性传感器在工业自动化和自动驾驶领域的兴起,例如激光雷达可以搭配MEMS IMU以获得姿态(横滚、俯仰和偏航)及地理坐标信息,助力自动驾驶汽车实现更加安全的导航和定位功能。本课程详细讲解高端MEMS惯性传感器关键技术,并针对典型案例进行分析,最后展望发展趋势。
课程提纲:
1. 高端MEMS惯性传感器定义及性能指标;
2. 高端MEMS加速度计关键技术;
3. 高端MEMS陀螺仪关键技术;
4. 高端MEMS惯性测量单元(IMU)关键技术;
5. 高端MEMS惯性传感器案例分析;
6. 高端MEMS惯性传感器发展趋势。
课程二:多轴MEMS惯性传感器
老师:中国科学院上海微系统与信息技术研究所 副研究员 陈方
多轴MEMS惯性传感器的发展经历了从“器件组装”到“芯片组合”,再到“单芯片集成”的三个阶段。博世、意法半导体、TDK InvenSense是多轴MEMS惯性技术的重要推动者,不仅将三轴MEMS加速度计和三轴MEMS陀螺仪融入广泛的消费电子产品中,还实现了“单芯片集成”六轴MEMS芯片。中科院上海微系统所独创的“微创手术(MIS)”工艺可以实现单芯片集成多轴,并与我国现有IC工艺相兼容。“微创手术(MIS)”与博世APS工艺和意法半导体VENSENS工艺同为相互竞争的第三代单芯片MEMS工艺,在微型化、高成品率和低成本规模制造方面具有较大优势。本课程重点剖析三轴MEMS陀螺仪和三轴MEMS加速度计关键技术,并介绍多轴MEMS惯性传感器研究进展,最后展望未来技术趋势。
课程提纲:
1. 三轴MEMS陀螺仪研究概述;
2. 三轴MEMS陀螺仪设计及制造工艺;
3. 三轴MEMS陀螺仪测控电路与ASIC集成;
4. 高频响三轴MEMS加速度计研究概述;
5. 高频响三轴MEMS加速度计设计及制造工艺;
6. 多轴MEMS惯性传感器未来展望。
课程三:高精度MEMS加速度计技术详解
老师:华中科技大学 副研究员 刘骅锋
MEMS加速度计的高精度性能需要通过降低噪声(机械热噪声和电学噪声)来实现,因此在MEMS芯片方面的措施包括:降低刚度系数、增大惯性质量、提高品质因数;在ASIC芯片方面的措施包括:降低电路噪声、提高系统增益。高精度MEMS加速度计在地球物理、航空航天等领域有非常高的应用价值。2019年4月,国际上研制的10⁻¹⁰g级高精度MEMS加速度计,作为洞察号火星探测器的有效载荷,在火星表面首次监测到火星震信号。刘骅锋老师作为此款高精度MEMS加速度计的骨干研发人员,将向大家讲解高精度MEMS加速度计的工作原理、参数要求及设计方法,并通过两个典型案例让学员们获得更为直接的技术体验。
课程提纲:
1. 高精度MEMS加速度计工作原理及性能参数;
2. 高精度MEMS加速度计设计方法;
3. 面向地球物理应用的高精度MEMS惯性传感器综述;
4. 案例1:MEMS重力加速度计及应用;
5. 案例2:MEMS微震加速度计及应用。
课程四:基于加速度计的振动监测与故障诊断
老师:苏州捷杰传感技术有限公司 高级振动分析师 朱晨亮
预测性维护是降低机器设备使用成本的重要手段,其是一种集故障检测、隔离、健康预测与评估及维护决策于一身的综合技术。近些年,随着“工业4.0”的推进和预测性维护的重视,在线振动监测技术在各种工业场合被广泛使用。振动监测领域最常用的传感器是加速度计,通过积分还可以从加速度信号中得到振动速度和位移信号。如今,基于MEMS技术的加速度计性能可以满足广泛的机器设备振动监测需求,再加上MEMS加速度计在尺寸、重量、成本、抗冲击性、易用性等方面优势,促使其越来越受到市场的青睐。本课程重点讲解基于加速度计的振动监测技术,并介绍在线振动监测系统集成方案及故障诊断应用案例。
课程提纲:
1. 预测性维护的意义;
2. 振动监测优势及发展史;
3. 振动传感器(加速度计)概述;
4. 基于振动传感器的便携式智能振动分析仪;
5. 在线振动监测软硬件系统集成方案;
6. 在线振动监测与故障诊断的应用案例。
课程五:双质量线振动(音叉式)MEMS陀螺仪
老师:中北大学 教授 曹慧亮
1993年,美国德雷珀(Draper)实验室通过在玻璃表面覆盖硅层技术制作了一种新颖的音叉式MEMS陀螺仪,其由双质量块、支撑梁和横梁组成,采用线振动驱动方式。该陀螺仪的双质量块设计可增加输出信号,但其驱动与敏感运动完全耦合,并且角振动的线性度较差,限制了其灵敏度的提高。所以,实现这种MEMS陀螺仪的全解耦结构设计显得非常重要。此外,为了实现高性能,陀螺仪的正交校正、温度补偿等也需重视。本课程讲授双质量线振动MEMS陀螺仪结构设计及制造、电气及系统建模、封装及测试等全方位内容,并展望MEMS陀螺仪未来发展。
课程提纲:
1. MEMS陀螺仪优点、分类及原理;
2. 双质量线振动MEMS陀螺仪研究现状;
3. 双质量线振动MEMS陀螺仪设计及制造;
4. 双质量线振动MEMS陀螺仪电气及系统建模;
5. 双质量线振动MEMS陀螺仪静电补偿控制;
6. 双质量线振动MEMS陀螺仪封测;
7. MEMS陀螺仪未来展望。
课程六:高精度固体波动(环形)MEMS陀螺仪
老师:南京理工大学 副教授 姜波
军用高精度MEMS陀螺技术路线与消费类MEMS陀螺技术路线完全不同,基本都是采用环境适应性好的全对称结构。美国国防高级研究计划局(DARPA)的Micro-PNT项目重点支持多环谐振盘陀螺仪(DRG)和微半球陀螺仪(VRG)的研制,取得很好的研究成果。2015年,DARPA启动的先进惯性微型传感器(AIMS)项目,强调只支持结构上全对称的二维或三维的CVG-II型陀螺仪研制。发达国家始终未停止对高性能环形全对称结构MEMS惯性传感器的研制步伐,已在实战中经过检验,实现了以全对称环形固体波动陀螺仪的“中高精度、低成本、高可靠、大批量、中端军用”应用设想。本课程全面介绍高精度环形MEMS陀螺仪知识,并对研究现状、发展趋势及典型应用进行解读。
课程提纲:
1. 高精度MEMS陀螺仪分类与对比;
2. 高精度环形MEMS陀螺仪谐振结构发展历程;
3. 高精度环形MEMS陀螺仪谐振结构工作原理与特点;
4. 高精度环形MEMS陀螺仪学术前沿与国内外研究现状;
5. 高精度环形MEMS陀螺仪发展趋势;
6. 高精度环形MEMS陀螺仪典型应用。
课程七:基于声光效应的行波陀螺仪
在无人驾驶航天器、火箭发射和石油钻探等涉及极端环境的应用中,陀螺仪芯片会受到很大的冲击过载。例如,导弹在发射期间过载超过20,000 g,这会导致陀螺仪中的可动悬置元件在大负载下发生故障,梳齿等检测结构可能断裂、粘附或被微粒污染。此前,科学家们提出了利用全固态声表面波(SAW)陀螺仪来解决过载问题。但是,SAW陀螺仪仍然面临许多挑战,例如测量限制、灵敏度下降以及温度补偿等。为此,西北工业大学结合SAW技术和光学探测方法,提出一种基于声光效应的高灵敏度行波陀螺仪——利用声光效应检测由机械应变引起的折射率变化,通过光波导的输出光功率强度测量角速度。本课程为大家详细讲授这种新型行波陀螺仪的原理、特点及关键技术。
课程提纲:
1. 基于声光效应的行波/驻波陀螺仪原理、特点;
2. 基于声光效应的行波陀螺仪与面波陀螺仪对比分析;
3. 基于声光效应的行波陀螺仪结构设计;
4. 基于声光效应的行波陀螺仪特性分析及工艺制备;
5. 基于声光效应的行波陀螺仪未来应用展望。
课程八:MEMS陀螺仪真空封装技术
老师:西北工业大学 教授 乔大勇
真空封装采用密封腔体提供高气密真空环境,使得MEMS器件的可动结构工作于真空环境下,能够提高MEMS器件的品质因数等性能。真空封装技术不仅是提高MEMS陀螺仪性能的关键技术之一,还决定了MEMS陀螺仪的可靠性、长期稳定性及成本。晶圆级真空封装的全部工艺流程都可以在超净间完成,这大大提高了MEMS陀螺仪的成品率,成功的圆片级封装将大大降低后续器件级封装的难度,晶圆级封装是MEMS封装的发展趋势。本课程全面讲解真空封装知识,并剖析晶圆级和器件级两大类真空封装技术及案例。
课程提纲:
1. 真空封装概述;
2. 真空测量技术;
3. 真空保持技术;
4. 器件级真空封装及惯性传感器案例;
5. 晶圆级真空封装及惯性传感器案例。
课程九:基于MEMS陀螺仪的寻北定向关键技术
老师:南京理工大学 副研究员 赵阳
惯性寻北是现代导航系统能够快速且精确定向的重要保障技术之一。基于陀螺仪的寻北仪(简称:螺仪寻北仪)是一种测量地球自转角速率在当地水平面投影方向(即真北方位)的惯性测量系统,其寻北过程无需外部参考。除受高纬度限制之外,螺仪寻北仪不受天气、昼夜时间、地磁场和场地通视条件的影响,可用于为动力运载工具、火炮、导弹和地面雷达等机动系统提供方位参考信息。本课程从捷联式寻北定向原理出发,阐述寻北精度对陀螺仪的指标需求,并讲解寻北用MEMS陀螺仪关键技术。
课程提纲:
1. 捷联式寻北定向原理;
2. 寻北精度与时间:陀螺仪指标需求;
3. 寻北精度的Allan方差评定;
4. 寻北用MEMS陀螺仪关键技术;
5. 其他影响因素:g敏感性和磁敏感性;
6. MEMS寻北定向技术现状与展望。
课程十:MEMS惯性传感系统设计及应用
老师:北京大学 教授/无锡北微传感科技有限公司 CTO 时广轶
北微传感采用三维集成技术构建具有特种传感功能的集成惯性微系统,并利用多传感融合技术提高灵敏度,借助系统级多物理场仿真进行设计优化,通过补偿与自校准方法提高可靠性与稳定性,其产品应用覆盖自动驾驶、工程机械、结构监测、自动化等领域。北微传感面向MEMS三维集成关键技术开展了攻关研究,掌握了硅通孔(TSV)各项关键技术,形成TSV成套工艺,并实现TSV集成建模与测试。此外,北微传感还掌握了先进的自校准技术,解决了包括零漂和温漂等影响MEMS惯性传感器长期稳定性的问题。在本课程中,北微传感CTO时广轶老师结合科研与产业两方面经验,详解MEMS惯性传感系统设计要点及典型应用。
课程提纲:
1. 惯性器件的分类,车辆导航对惯性芯片的最低要求?
2. 组合导航是否要做成芯片,芯片与PCB板级的权衡?
3. 惯性导航的发展趋势,研究的边界如何界定?
4. MEMS惯性传感微系统标定技术(自标定)及其重要性;
5. MEMS惯性传感微系统的应用领域;
6. 前期测试成果及北微传感的核心技术点;
7. MEMS向NEMS发展的技术预测。
课程十一:MEMS惯性传感器可靠性分析
老师:东南大学 副研究员 王磊
MEMS器件的可靠性需求一般来源于应用背景(工作环境和贮存环境)和器件类型(工作原理及失效机理)综合考虑,包括预期工作寿命、预期贮存寿命、装配失效概率、工作失效概率。在力学性能的评价标准方面,对于给定设计的MEMS产品,工艺一致性、稳定性是可靠性的唯一评价标准。在实际应用中,应该如何制定MEMS惯性传感器的可靠性测试项目和测试方法才能保证向最终应用端交付可靠的产品?MEMS惯性传感器结构和工艺中,哪些因素会带来产品失效?本课程从MEMS可靠性基础知识出发,结合国家标准和典型案例,为学员们答疑解惑!
课程提纲:
1. MEMS可靠性导论;
2. MEMS材料力学性能评价及评价标准;
3. 常见MEMS失效模式及失效机理;
4. MEMS可靠性测试及分析技术;
5. MEMS加速度计可靠性分析;
6. MEMS陀螺仪可靠性分析。
六、师资介绍
邹旭东,博士,国家海外高层次人才青年项目入选者。现任中国科学院空天信息创新研究院 “传感技术国家重点实验室(北方基地)”课题组长、研究员、博士生导师,中国科学院大学电子电气与通讯工程学院岗位教授、博士生导师,中国科学技术大学国家示范性微电子学院兼职博士生导师,中国电子学会“传感与微系统”分会青年副主任委员,中国微米纳米技术学会国际合作交流委员会委员。本科毕业于北京大学元培计划实验班,获得微电子专业理学学士学位,研究生毕业于剑桥大学工程系,获得微系统专业博士学位。他曾在剑桥大学纳米科学中心从事研究工作并当选剑桥大学丘吉尔学院Research Fellow,2016年全职加入中国科学院电子学研究所,任研究员。邹旭东研究员长期从事微机电系统(MEMS)、微机械谐振器、高精度微惯性传感器、多功能集成微系统、定位-导航-授时(PNT)微系统以及微纳加工技术开发等研究工作。自2014年至今,主持或共同主持Innovate UK、UK NERC以及国家自然科学基金、国家重点研发计划、国防科技创新特区、中科院“从0到1”原始创新项目、仪器研制项目、重点部署项目等科研项目10余项。研究成果在MEMS以及传感器、机器人与人工智能领域内著名期刊及国际会议上共发表论文60余篇,多次获得会议优秀论文奖,合著英文专著1部、合作翻译专著1部;申请发明专利30余项,其中国际发明专利6项,授权专利8项。他长期担任中国科学院大学研究生专业核心课《微机电系统基础》首席教授,曾获中国发明协会发明创新奖、国家优秀自费留学生奖、中国电子教育学会优秀博士生论文指导教师奖等荣誉。
陈方,博士,中科院上海微系统与信息技术研究所传感技术国家重点实验室副研究员,研究生导师,上海市惯性技术协会理事。他在西北工业大学分别取得工学学士、硕士和博士学位,曾在英国南安普顿大学Prof. Michael Kraft团队进行博士联合培养,并获得了美国加州大学Irvine分校Prof. Shkel实验室博士后职位,于2014年9月加入中国科学院上海微系统与信息技术研究所。陈方及其研究团队多年来一直从事微纳惯性传感器领域的相关研究工作,在MEMS惯性传感器设计、低噪声接口ASIC电路、模拟/数字力平衡闭环测控技术等方面取得创新性成果。现主持了国家重点研发计划子课题、JKW基础加强计划子课题、国家自然科学基金面上项目、青年项目、上海市智能传感创新重大专项和上海市自然科学基金等研究,以第一作者身份在顶级国际会议IEEE MEMS、IEEE Transducers和IEEE Sensors上先后发表惯性技术论文10余篇,并受邀在IEEE MEMS 2021和IEEE Sensors 2016上首次进行了高精度惯性器件研究成果口头报告;在本领域权威期刊Microsystems & nanoengineering、Sensors & Actuators A: Physical、IEEE J.MEMS、IEEE Sensors J.、JMM上发表惯性技术论文10余篇,受邀在IEEE Sensors J.、Sensors上分别发表综述论文,并受邀合作撰写专著《中国电子信息工程领域发展研究-传感器基础》和《中国学科发展战略-微纳机电系统与微纳传感器技术》。
刘骅锋,博士,华中科技大学引力中心副研究员、博士生导师,现任IEEE CASS-EDS-SSCS武汉联合分会副主席、中国仪器仪表学会地质仪器分会理事、中国微米纳米技术学会高级会员、中国惯性技术学会高级会员以及《中国惯性技术学报》等期刊编委。2009年获得中北大学学士学位,2011年和2016年分别于英国南安普顿大学和英国帝国理工学院获得MEMS方向硕士和博士学位。近十年来一直从事高精度MEMS惯性传感器的设计、加工、电路以及测试方面的研究工作,拥有多年洁净室流片经验。他发表相关领域SCI/EI收录论文70余篇,英文专著章节1章,授权专利20余项,荣获2020年国际微系统及纳米工程(MINE 2020)青年科学家奖。近五年主持国家自然科学基金面上项目、国家重点研发计划“智能传感器”专项课题、国家航天局项目、GF预研基金重点项目等科研项目10余项。他曾作为骨干参与研制洞察号火星探测器MEMS微震仪,曾负责研制MEMS空间微重力测量装置并搭载长征五号B型火箭完成飞行验证,目前负责嫦娥七号探月器MEMS月震计研制任务。
朱晨亮,毕业于苏州大学,2013年9月获得美国VI振动协会ISO 18436-2国际振动分析师资质。2009年毕业后专门从事造纸、石油炼化、冶金、粮油、风电、水利水电等设备故障诊断分析工作。他先后参与了秦山核电站二期核电机组、日照钢铁、上海宝钢、湛江钢铁、独山子石化、益海嘉里粮油(集团)、南通港口集团、上海洋山港、南水北调、引江济淮、千岛湖引水工程、宁波原水、广州地铁(18号线)、佛山地铁(3号线)等几十个在线监测系统项目的开发、现场实施与设备故障诊断分析工作。他熟悉掌握设备故障诊断理论在实际设备中的运用。对设备机械故障(例如:不对中、不平衡、轴承故障等)、电机电气故障、水利故障诊断有一定的算法研究。他参与了多项技术研究和教材编译工作,例如美国VI振动协会ISO 18436-2国际振动分析师培训教材部分章节翻译工作;沿江泵站超低扬程水力共振防治关键技术及应用研究(编号:2016035);中水淮河公司的智慧泵站研究。
曹慧亮,教授、博士生导师,东南大学和美国佐治亚理工学院联合培养博士,2014年毕业于东南大学仪器科学与技术专业,获工学博士学位。他是山西省高等学校青年学术带头人、三晋英才、山西省人社厅留学回国人员科技活动择优资助项目获得者、IEEE Member、中国微米纳米学会高级会员、中国自动化学会高级会员、ICAN中国联盟常务理事(山西赛区)。他主要从事微机械(MEMS)陀螺仪设计加工、测控及数据处理等方面的工作,以第一(通讯)作者发表SCI论文40余篇,授权发明专利20余项,出版专著《双质量线振动硅微机械陀螺仪》一部。近年来,他作为项目负责人主持装备发展部重点领域基金2项,中央军委科技委基础加强领域基金1项,国家自然科学基金1项,兵器联合基金、航空基金、山西省基金等省部级项目10余项,作为骨干参与国家级省部级课题多项。在教学方面,他主讲《单片机原理及应用》和《微惯性器件》课程,主持和参与中北大学校级教改项目3项,指导学生参加各类创新大赛获奖20余项,其中国家级奖励12项,获得2019年度山西省教学成果奖二等奖。
姜波,博士,南京理工大学机械工程学院副教授、硕士生导师,仪器仪表学会微纳器件与系统技术分会理事,《中国惯性技术学报》、《飞控与探测》期刊青年编委。他长期从事MEMS技术、MEMS陀螺仪结构设计等工作,并取得了相关成果。目前,他主持国家自然科学基金面上项目、青年项目,江苏省自然科学基金青年项目、重大基础研究项目课题、科工局稳定支持项目开放基金等省部级及以上项目6项,参与其他省部级及以上课题多项,主要负责高精度MEMS陀螺仪新结构、新原理的研究。他以第一作者在APL、J.MEMS、SENSOR ACTUAT A-PHYS等期刊上发表论文,授权国家发明专利5项。在MEMS固体波动(环形)陀螺仪领域具有较为丰富的研究经验,设计了多款MEMS固体波动(环形)陀螺仪。
乔大勇,博士,长江学者特聘教授,西北工业大学教授、博士生导师。他是微机电系统(MEMS)领域资深专家,先后主持包括国家自然科学基金和国家重点研发计划在内的科研项目14项,主要研究方向为微光机电系统(MOEMS)和微纳制造工艺。他出版国家级规划教材《微机电系统》一部,出版国家学术著作出版基金资助专著《微机电系统(MEMS)制造技术》一部。
赵阳,博士,南京理工大学副研究员。自2011年起开始从事MEMS惯性技术研究,主要研究方向包括MEMS惯性传感器高精度ASIC测控技术、MEMS陀螺仪在线自补偿与自校准技术。他主持国防973子专题、国家青年自然科学基金、装备预研领域基金等多项重点科研项目,以第一作者身份发表SCI/EI论文20余篇,并于2015年和2018年先后在国际集成电路领域顶级期刊IEEE JSSC上发表国内首篇关于MEMS加速度计与陀螺仪的文章。他参与撰写MEMS谐振梁加速度计ASIC英文著作《MEMS Oscillating Accelerometers and Interface Circuits》一部。
时广轶,博士,北京大学软件与微电子学院教授,北京大学微米纳米加工技术国家重点实验室博士后,全国惯性技术计量技术委员会委员,无锡北微传感科技有限公司首席技术官(CTO)。2007年毕业于香港中文大学,获自动化与计算机辅助工程专业博士学位。2017年~2019年作为主要起草人制定了两项国家标准:《多轴倾角传感器校准规范》、《三维电子罗盘校准规范》。他的主要研究方向为MEMS-SOC设计与实现、MEMS惯性传感芯片,并且在微机电传感电路设计、MEMS与CMOS工艺兼容、高精度MEMS惯性传感开发等方面拥有丰富经验。
王磊,博士,2012年获东南大学电子科学与工程学院工学博士,现任东南大学副研究员。他长期从事MEMS器件可靠性研究工作,承担和参与了多项国家科研项目,包括国家重点研发项目,“十一五”、“十二五”、“十三五”的预研项目,“十二五”重大专项,国家自然科学基金项目,以及多项企业横向合作项目。他主持制定了多项企业MEMS可靠性标准,并牵头协同了国内11家企事业单位共同起草了GB/T 38341-2019“微机电系统(MEMS)技术MEMS器件的可靠性综合环境试验方法”国家标准。
七、培训费用、报名方式及培训赞助咨询
报名方式:请发送电子邮件至BISainan@MEMSConsulting.com,邮件题目格式为:报名+ MEMS惯性传感器培训+单位简称+人数。
报名网站:https://www.memstraining.com/training_47.html
培训赞助:请致电联系毕女士(18921125675),或麦姆斯咨询固话(0510-83481111)。
麦姆斯咨询
联系人:毕女士
电话:18921125675
E-mail:BISainan@MEMSConsulting.com