经济型可拉伸柔性压力传感器,实现高精度连续力监测和力映射
2025-09-27 19:25:27 来源:麦姆斯咨询 评论:0 点击:
这项研究开发了一种经济型柔性压力传感器,可用于保形和高精度力映射,可广泛应用于可穿戴系统、智能用户界面、机器人皮肤以及机器触觉质量评估工具等领域,有望在推动自然化和情感化人机交互发展中发挥重要作用。
触觉传感器在人机交互(HMI)中发挥着关键作用,为该领域提供必要的触觉感测能力,其性能直接决定了人机交互机器的操作安全性和触觉质量。当触觉传感器应用于人体或机器表面时,如何舒适并贴合身体曲线成为亟待解决的重大挑战。现有的可拉伸柔性传感器虽具有良好的自适应保形和精度,但其制造工艺通常依赖于昂贵且专业的制造设备,导致来自人机交互跨学科领域的研究人员难以实施、定制和部署。
据麦姆斯咨询报道,为解决上述问题,瑞典皇家理工学院(KTH Royal Institute of Technology)的研究团队提出了一种成本低且制造工艺简单的可拉伸柔性压力传感器,源自传统剪纸艺术“Kirigami”的灵感。实验结果表明,所研制的压力传感器原型不仅贴合人体曲线,同时具备高力检测精度(在0 - 1000 g/cell范围内平均误差仅4%),其采样电路还展现出有效的串扰消除功能。该方案还可以作为柔性电子器件快速制造的方法论,在预加载(例如坐/卧姿势)和非预加载(例如接触检测)场景下实现高精度连续力监测。相关研究内容以“A Kirigami-Inspired Stretchable Pressure Sensor for Conformal and Decoupled Human–Machine Touch Mapping”为题发表在IEEE Sensors Journal期刊上。
该传感器采用经典压力传感器阵列结构,其核心功能由中间电阻式压敏层和上下条纹状导电层共同实现。由于压敏材料被置于呈交叉形态排列的导电条带之间,横向与纵向相交的重叠区域定义了压力传感器矩阵中每个单元的有效面积。多数商用FSR压力传感器阵列均采用这种结构配置(如图1)。该压力传感器主要由两层热塑性聚氨酯(TPU)衬底、两层热熔粘合TPU、两层铜箔带以及一层压敏材料(Velostat材料)构成。在这些层中,TPU衬底织物的表面粘度和触感与TPU热熔粘合层不同,可用于提升接触人体皮肤时的触觉质量。该压力传感器所使用的材料均具柔软特性,使整个传感器具备柔性和易集成的特点。
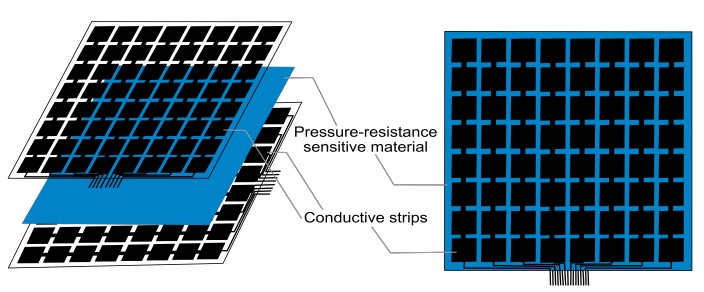
图1 力传感矩阵及其主要组件的概念示意图
图2展示了柔性压力传感器的制造工艺。铜箔带首先粘附于热熔粘合TPU薄膜上,以增强其强度并有助于精密切割复杂的图案。组装后的传感器图案按等比例印刷于纸张上,以供组件定位参考。

图2 柔性压力传感器的制造工艺
图3展示了该压力传感器矩阵的三种读取方法。图中的绿色单元格表示该单元正在被微控制器单元(MCU)读取,灰色单元表示其处于受力状态。图3a展示了一种广泛使用的电路方案。图3b电路可使传感器在降低功耗的同时消除行与行之间的交叉走线。图3c为本文采用的电路方案。
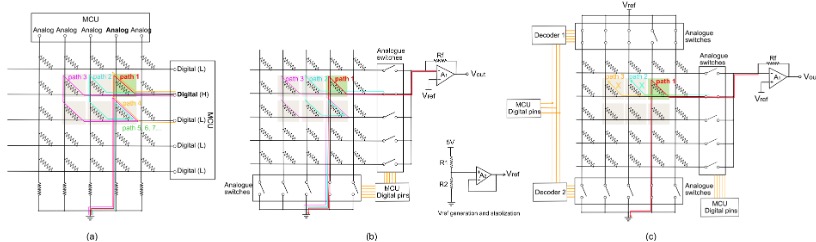
图3 压力传感器矩阵读取的三种电路原理图及其交叉走线效应分析
在采用矩形穿孔设计(如图4c,kirigami方法)之前,研究团队制作的另一款可拉伸传感器采用蛇形设计实现可拉伸性。通过对比两种设计的功能区域比例,研究人员发现负泊松比(auxetic)设计(如图4d)在无需额外空间实现可拉伸性的前提下,获得了更大的读取区域。蛇形设计并不适用于多种机械弹性差异显著材料组合而成的传感器。通过采用kirigami方法,机械需求从直接拉伸应变转变为局部弯曲和变形。该策略在保留不可拉伸组件(例如铜)结构完整性的同时,使复合传感器实现了高整体可拉伸性。Kirigami压力传感器的拉伸模拟结果如图4a和图4b所示。Kirigami压力传感器的循环拉伸测试如图4e至图4k所示。
最后,研究人员对该Kirigami压力传感器进行了应用展示,相关结果如图4l至图4q。如图4l和图4m所示,该Kirigami压力传感器的柔软度足以与大面积身体皮肤(例如肩部和下背部)保形,而无需进行最终的切割工序。切割后,该Kirigami压力传感器能更舒适地贴合在肢体关节(如图4n)。如图4o所示,即使在大量的预加载条件下(例如坐下和下弯姿势),该Kirigami压力传感器仍能保持有效测量空间来检测柔性执行器触碰。这意味着该Kirigami压力传感器可在宽压力范围内保持高灵敏度。
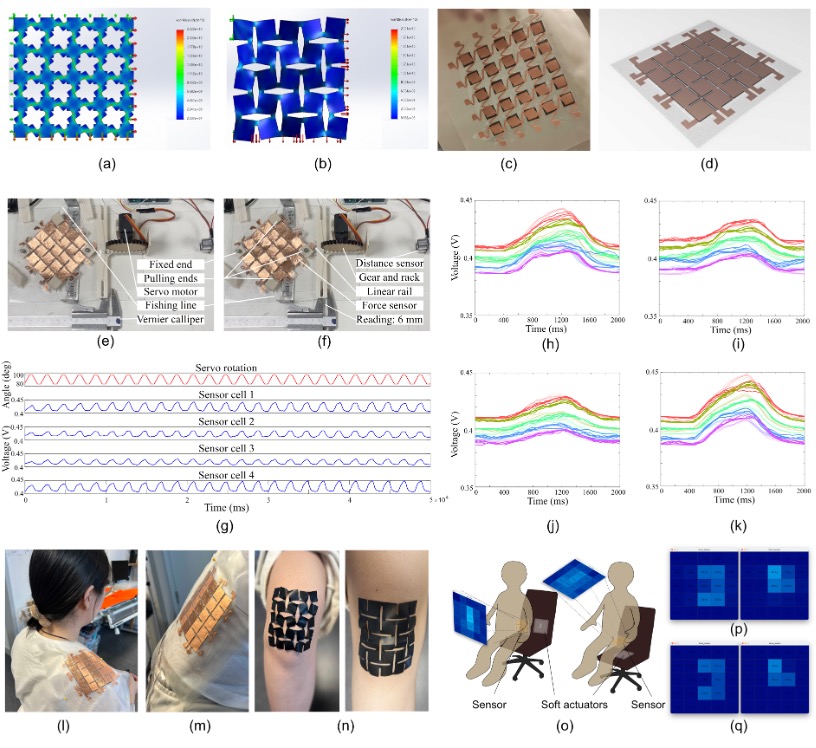
图4 Kirigami压力传感器的拉伸模拟、循环拉伸测试以及应用
综上所述,这项研究开发了一种经济型柔性压力传感器,可用于保形和高精度力映射。该压力传感器采用通用现成材料制成,并通过常用设备制造。同时,研究人员提出了一种消除交叉干扰的采样电路方案,且不受传感器阵列形状和尺寸的限制。该方法避免了力信号混叠和接触区域误分类,促进了其在高精度触觉传感和多点同步检测中的应用。此外,这项研究还探讨了压力传感器尺寸参数对其拉伸性能的影响,并通过应力模拟比较了Kirigami结构相对于传统蛇形设计的优势。该研究还采用简化循环拉伸测试,初步评估了该压力传感器的可靠性。尽管实验结果显示存在一定程度的蠕变和基线漂移,表明需进一步优化其结构和测试条件,但该柔性压力传感器仍具有广阔的应用前景,未来可广泛应用于可穿戴系统、智能用户界面、机器人皮肤以及机器触觉质量评估工具等领域,有望在推动自然化和情感化人机交互发展中发挥重要作用。
论文链接:https://doi.org/10.1109/JSEN.2025.3611882
延伸阅读:
上一篇:基于PVDF的多功能触觉传感平台:优异的触觉分辨率和力传感能力
下一篇:“会呼吸”高灵敏度柔性压力传感器,赋能先进可穿戴健康监测应用