第74期“见微知著”培训课程:力学传感器及触觉感知
2025-09-02 11:27:24 来源:麦姆斯咨询 评论:0 点击:
力学传感器是触觉感知系统的关键组成部分,而触觉感知则是实现智能机器人环境感知与人机交互的基础能力之一。随着人工智能技术的突飞猛进,触觉感知正迈入智能化发展阶段,为具身智能应用提供有力支撑。
主办单位:麦姆斯咨询
协办单位:上海传感信息科技有限公司
一、课程简介
力学传感器(Mechanical Sensors)是一类能够感受外部机械刺激并将相关机械信号转换为可用电信号的换能器,包括应力/应变传感器、力/力矩传感器、压力传感器、振动传感器等。根据换能原理,力学传感器可分为电阻式(例如应变式、压阻式)、电容式、压电式、离电式、摩擦电式、磁敏式、光敏式等。触觉感知(Tactile Perception)是生物体或仿生系统通过皮肤感受器或传感元件,对外部机械、温度等物理刺激的感知能力,其通常涉及多模态输入信号的融合识别与解码。力学传感器是触觉感知系统的关键组成部分,而触觉感知则是实现智能机器人环境感知与人机交互的基础能力之一。2021年诺贝尔生理学或医学奖“花落”触觉感知领域,相关研究工作为触觉感知向触觉智能的发展演化奠定了坚实基础,有望推动人工智能(AI)系统突破对视觉与听觉感知的依赖,迈向融合多模态感知的更高级类人智能系统。
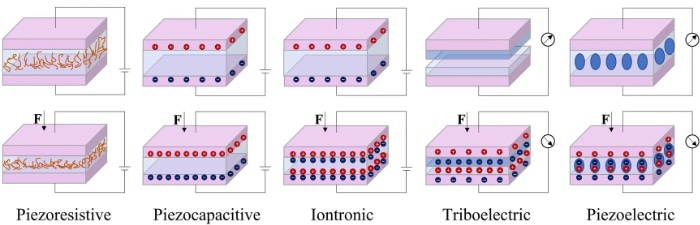
力学传感器的换能原理示例
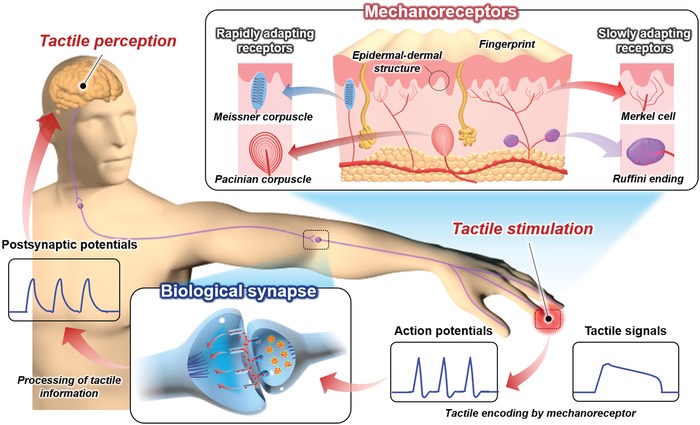
人类触觉感知系统
机器人已成为当今科技领域的重要研究方向,传感器在其系统构成中占据约10%~20%的比重。其中,多维力/力矩传感器能够同时检测多个方向的力和力矩信息,是推动机器人系统性能演进的核心感知单元,对于实现机器人的柔顺操作与智能控制至关重要,在提升机器人与环境交互能力方面发挥着关键作用,因此广泛应用于协作机器人、人形机器人、康复机器人、微创手术机器人。多维力/力矩传感器主要由弹性体和敏感元件两部分组成,分别起到力/力矩的承载和感知作用。常用的弹性体分为两种结构类型:一体化结构和斯图尔特(Stewart)并联结构;其中,一体化结构包括竖梁式、横梁式、复合梁式、圆筒式等。目前,大尺寸、大量程和高精度机器人用多维力/力矩传感器的研制技术已比较成熟,并且已得到广泛的商业化应用,但仍存在难以批量化制造、成本高和尺寸大等问题。有鉴于此,微型化和批量化成为机器人用多维力/力矩传感器的主要发展趋势。利用MEMS及IC技术可以将微型弹性体结构、微型敏感元件以及信号调理和控制电路集成于一颗微小芯片,为多维力/力矩传感器技术发展提供了一种有效的解决方案。
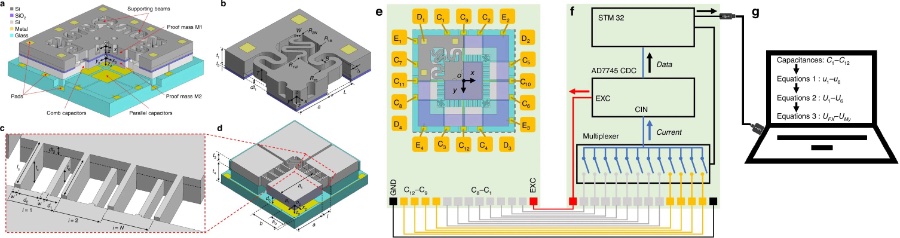
西安交通大学开发的MEMS六维力/力矩传感器芯片及其调理电路
近年来,随着微纳制造工艺和柔性电子技术的不断发展,柔性力学传感器日益受到广泛关注。与基于传统机械加工的刚性力学传感器相比,基于先进微纳制造的柔性力学传感器不仅具备更好的可穿戴性与生物相容性,还在可扩展性及系统集成性方面占据优势,因此在人形机器人指尖触觉感知、电子皮肤(e-skin)、智能假肢等方面展现出更大的应用潜力。此外,柔性力学传感器还被开发出其它新颖的特性,特别是光学透明性,使其能够以视觉不可察觉的方式发挥作用。近期,清华大学精仪系朱荣教授团队开发出一种结构简单、外形小巧、重量轻便(0.3 g)的柔性六维力/力矩传感器。该传感器利用叠层分布的薄膜热敏电阻(微纳制造方法为光刻和溅射)来感知柔性压热材料的空间应变,实现对六维力/力矩的宽量程、高精度柔性感知,可用于机器人灵巧手的指端以实现对物品的精细操作。随着技术不断成熟和完善,该柔性六维力/力矩传感器有望在更多领域发挥重要作用,推动智能机器人、工业制造、家庭服务、医疗康复等领域的长足发展。
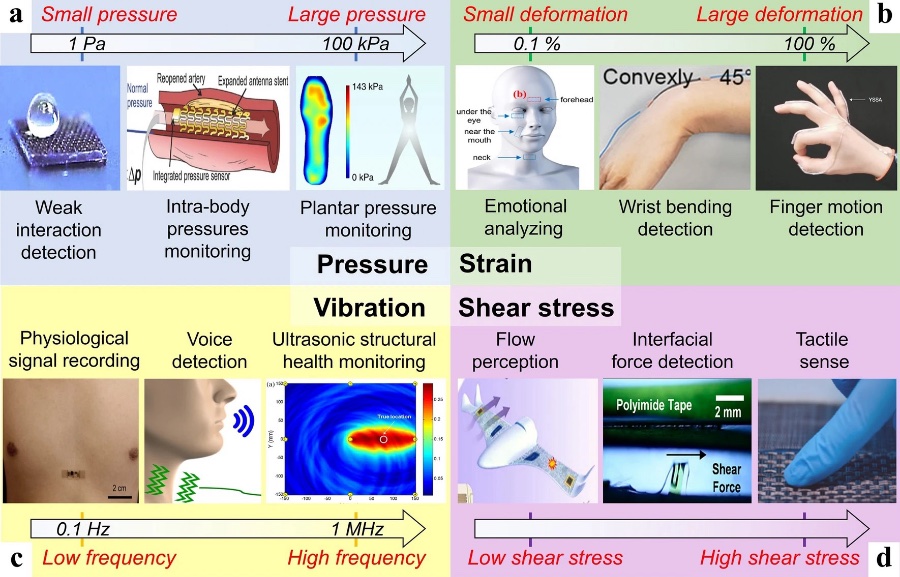
四种柔性力学传感器类型(压力、振动、应力、应变)的应用示例
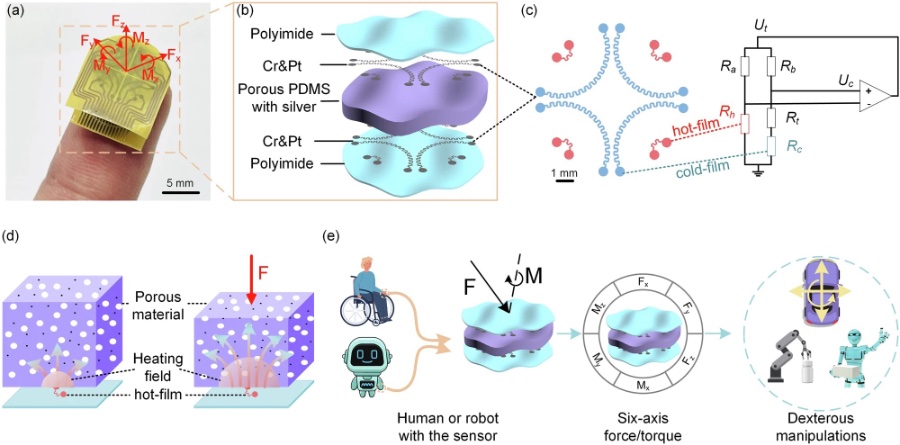
清华大学开发的超轻、超小柔性六维力/力矩传感器及其灵巧操作应用
为了把握机器人及人机交互领域的发展机遇,麦姆斯咨询特地邀请在力学传感器及触觉感知领域颇有建树的科研学者及企业高管,为大家讲授丰富多彩的培训课程:(1)MEMS应力/应变传感器及磁触觉感知;(2)电容式MEMS力传感器;(3)高精度压阻式MEMS力传感器;(4)机器人六维力传感器和柔性力传感器;(5)高性能力学传感器及触觉感知;(6)柔性力敏传感材料与力学传感器;(7)柔性多维力传感器及仿生多功能触觉感知;(8)人形机器人用柔性触觉传感器;(9)柔性自驱动触觉传感器及人机交互应用;(10)触觉传感器及具身智能应用;(11)视触觉传感器技术及机器人应用。
二、培训对象
本课程主要面向力学传感器及触觉感知产业链上下游企业的技术人员和管理人员,以及高校师生,同时也欢迎其他希望了解机器人传感器的非技术背景人员参加,例如销售和市场人员、投融资机构人员、政府管理人员等。
三、培训时间
2025年10月24日~26日
授课结束后,为学员提供麦姆斯咨询的结业证书。
四、培训地点
无锡市(具体地点以培训前一周的邮件通知为准)
五、课程内容
课程一:MEMS应力/应变传感器及磁触觉感知
老师:北京理工大学 教授 王晓毅
应力/应变传感器是一类能够将外部机械刺激产生的应力或应变转化为可用电信号的换能器。它既可用作六维力/力矩传感器的敏感单元,也可成为人工触觉感知系统的“神经末梢”。随着MEMS制造工艺和柔性电子技术的进步,应力/应变传感器已逐步实现小型化、柔性化和高分辨阵列化,使其不仅能够精准感知压力、拉伸、弯曲等力学刺激,还可通过多模态融合实现类似人类皮肤的综合触觉感知。智能机器人不仅能通过触觉感知来控制抓取物体的力度,还能进一步结合深度学习等算法来识别接触物体的材质。按照工作原理,触觉传感器可分为电敏式、磁敏式、光敏式等,其中,磁敏式触觉传感器利用磁体和磁敏元件(例如霍尔效应/磁阻效应器件)之间的磁场耦合关系,对外部机械刺激进行感知与解析,在多维力解耦检测方面具有优势。本课程主要针对“MEMS应力/应变传感器”和“磁敏式触觉传感器”两大部分进行基础知识、关键技术、发展现状的讲解。
课程提纲:
1. 应力/应变传感器基础知识;
2. MEMS应力/应变传感器关键技术;
3. MEMS应力/应变传感器发展现状;
4. 触觉传感器基础知识;
5. 磁敏式触觉传感器关键技术;
6. 磁敏式触觉传感器发展现状。
课程二:电容式MEMS力传感器
老师:杭州电子科技大学 教授 董林玺
电容式MEMS力传感器利用微加工技术制造而成,通过检测电容变化来感测外界机械力,相比压阻式MEMS力传感器,具有灵敏度更高、温度独立性更好的优势。电容式MEMS力传感器的敏感电容类型主要分为间距变化型、面积变化型。间距变化型工作原理是外界机械力使得电容两极板的间距发生变化,从而引起电容值的非线性变化进行感测,特点是线性度较差和量程较小,但具有更高的灵敏度;面积变化型工作原理是外界机械力使得电容两极板的正对面积发生变化,从而引起电容值的线性变化进行感测,特点是灵敏度较低,但具有更好的线性度和更大的量程。电容式多维力/力矩传感器往往将多个面积变化型和间距变化型电容组合使用,通过多个电容的高度对称布置和后端解耦运算实现多维力/力矩的精确解耦感测。基于MEMS技术的多维力/力矩传感器在实现微型化的同时能够保证高的测量精度。本课程首先概述电容式力传感器,然后详解电容式MEMS力传感器关键技术:设计、制造、测试与校准,最后进行技术总结与展望。
课程提纲:
1. 电容式力传感器概述:工作原理、发展历程;
2. 电容式MEMS力传感器设计与优化;
3. 电容式MEMS力传感器制造工艺;
4. 电容式MEMS力传感器测试与校准;
5. 电容式MEMS力传感器技术总结与展望。
课程三:高精度压阻式MEMS力传感器
老师:西安交通大学 副研究员 赵友
电阻式力传感器根据敏感原理主要分为两种类型:压阻式和应变式,通常由弹性体、应力/应变敏感电阻和惠斯通电桥电路组成。当弹性体受到外界机械力作用时,弹性体产生应力/应变,从而导致弹性体上的敏感电阻的阻值发生变化,通过惠斯通电桥电路可将电阻变化转化为电压输出。通过弹性体结构的合理设计、敏感电阻的对称布置及合理组桥可以实现多维力/力矩的解耦输出,适用于机器人的关节位置。相比应变式力传感器,压阻式MEMS力传感器基于半导体材料的压阻效应,具有更高的灵敏度、更优异的信噪比,更适合于微型化和高精度的应用场合,但是MEMS压敏电阻对温度变化较为敏感,需要更完善的温度补偿技术来抑制传感器的温度漂移。西安交通大学赵友老师主要从事硅压阻式高精度测力传感器和碳化硅MEMS耐高温压力/振动传感器研究工作,多项研究成果以专利权转让的形式实现在企业的转化应用。本课程从力传感器基础知识出发,深入讲解压阻式MEMS力传感器及其核心组件(包括MEMS芯片、弹性元件)。
课程提纲:
1. 力传感器概述;
2. 压阻式MEMS力传感器芯片;
3. 力传感器的弹性元件;
4. 高精度压阻式MEMS力传感器;
5. 新型特种压阻式MEMS压力和惯性传感器。
课程四:机器人六维力传感器和柔性力传感器
老师:苏州大学 副教授 潘明强
当机器人与外界环境交互时,需要对施加的力和力矩进行准确测量和反馈,以确保作业过程的稳定与安全。六维力传感器作为机器人的关键感知技术之一,能够同时检测多个方向的力和力矩信息,在抓取、打磨、装配、手术等领域中得到了广泛应用。六维力传感器主要由弹性元件和敏感元件两部分组成,分别起到力/力矩的承载和感知作用。其中,弹性元件主要包括刚性和柔性两种类型,敏感元件主要包括电阻式、电容式、压电式、磁敏式、光敏式等类型。目前,基于传统机械加工的机器人六维力传感器技术业已成熟,并且实现了商业化应用,但仍存在难以批量化制造、成本高、尺寸大等缺点。而基于MEMS制造工艺的的六维力传感器则在尺寸、成本、功耗、可靠性、批量生产等方面具有显著优势,在机器人领域的发展前景广阔,有望成为未来的主流技术之一。本课程首先概述面向机器人的力感知技术,然后重点讲解六维力传感器和柔性力传感器关键技术及应用,最后进行技术总结与趋势展望。
课程提纲:
1. 面向机器人的力感知技术概述;
2. 力传感器基本原理及分类;
3. 六维力传感器设计、制造、应用;
4. 柔性力传感器设计、制造、应用;
5. 面向机器人的力感知技术总结与发展趋势。
课程五:高性能力学传感器及触觉感知
老师:华东理工大学 教授 高阳
力学传感器是一种用于感知外界机械刺激的电子器件,在机器人、结构安全监测、生物力学等领域展现出广阔的应用前景。然而要满足上述应用要求,一方面,力学传感器需要具备高灵敏度、快速响应和长期稳定性;另一方面,还需要寻求高效且可规模化制备力学传感器及其阵列的方法。为此,华东理工大学高阳教授团队采用表界面工程手段,显著提高了应变和应力传感器的灵敏度和响应速度;将仿生微结构引入力学传感器,显著提升了器件性能;开发了基于激光微加工的力学传感器制备新工艺,实现了器件的可控、高效制备。触觉感知是智能机器人和人机交互系统中的关键功能,高性能力学传感器有望推动触觉感知系统从功能模仿走向智能超越。本课程首先介绍力学传感器基础知识,然后详解高性能力学传感器关键技术,阐述触觉感知原理与系统实现并分析应用案例,最后进行技术总结与未来展望。
课程提纲:
1. 力学传感器基础理论与性能表征;
2. 高性能力学传感器技术与实现;
3. 触觉感知原理与传感器系统;
4. 触觉感知前沿应用与案例分析;
5. 力学传感器及触觉感知总结与展望。
课程六:柔性力敏传感材料与力学传感器
老师:中国科学院重庆绿色智能技术研究院 研究员 魏大鹏
柔性压力传感器基于柔性力敏材料体系和微纳制造工艺构建而成,通常包含两层柔性电极和中间的功能软材料,按照工作原理可分为电容型、电阻型、压电型、摩擦电型等。用于柔性压力传感器的功能材料有碳纳米管、石墨烯、纳米线、有机聚合物、离子凝胶等。合理选择与复合这些材料,是推动传感器实现高性能和多场景应用的关键。在机器人领域,柔性力学传感器可将“类人触觉(电子皮肤)”赋予机械手和仿生机器人,使其具备精细的抓取、力反馈与交互能力,提升操作的安全性与智能化水平。此外,柔性力学传感器还可用于各种可穿戴设备,实现对人体运动与生理信号的实时监测,为个性化医疗与智能健康管理提供支撑。中国科学院重庆绿色智能技术研究院魏大鹏课题组发展了仿皮肤微纳力敏触点的设计方法,提出了三维共形碳纳米力敏材料的可控构筑方法,研制了低噪声、高灵敏、快响应、低迟滞的高分辨柔性压力传感器,应用于机器人灵巧手、人机交互、健康监测等领域。本课程详细讲解柔性力学传感器关键技术,从力敏材料到设计与制造,并介绍柔性力学传感器在机器人及大健康领域的应用。
课程提纲:
1. 柔性力学传感器概述;
2. 柔性力敏材料体系及碳基力敏材料制备;
3. 柔性力学传感器设计与制造;
4. 柔性力学传感器在机器人及大健康领域的应用;
5. 柔性力学传感器技术与应用展望。
课程七:柔性多维力传感器及仿生多功能触觉感知
老师:浙江工业大学 教授 吴化平
近年来,随着可穿戴电子设备和人工智能(AI)技术的迅猛发展,柔性力传感器的应用需求不断提升。然而,传统的柔性力传感器通常仅能检测法向压力,其功能单一,难以满足复杂环境和先进智能系统的多维感知需求。为解决这一问题,柔性多维力传感器应运而生,并逐渐成为了学术界与产业界的共同关注热点,其凭借多角度与全方位的检测优势,能够实时解析物体在三维空间的受力分布,从而实现更全面和高精度的力学感知。柔性多维力传感器性能突破主要取决于力电耦合机理、器件结构、功能材料和解耦方法等方面的持续创新。这些进展不仅可以提升传感器的灵敏度、稳定性与可靠性,也为其在可穿戴健康监测设备、智能机器人手臂、运动辅助系统、神经假体以及人机交互等多元化应用场景中创造新的发展契机。本课程详细讲解柔性三维/六维力触觉传感器设计与制造,以及仿生多功能柔性触觉感知技术与应用。
课程提纲:
1. 柔性多维力触觉传感器概述;
2. 柔性三维力触觉传感器设计与制造;
3. 柔性六维力触觉传感器设计与制造;
4. 仿生多功能柔性触觉感知;
5. 柔性多维力触觉传感器应用展望。
课程八:人形机器人用柔性触觉传感器
老师:中国科学技术大学苏州高等研究院 长江学者讲席教授 潘挺睿
触觉感知是人形机器人实现类人智能的核心功能之一,其依托模拟人类皮肤的触觉传感器来检测和解析外部刺激(包括力/力矩、摩擦、振动、温度、湿度等),从而支撑人形机器人对环境的实时响应及智能交互。近年来,柔性离电学的兴起为仿生触觉感知提供了一种鼓舞人心的新型解决方案。柔性离电传感(Flexible Iontronic Sensing,FITS)被国际主流学术界列为新一代(第四代)柔性力和触觉传感机制,其结合了离子和电子双重信号传导,能够更自然地模拟人类皮肤的感知功能,在灵敏度、响应速度、功能性等方面具有显著优势。特别是在2022年之后,随着人工智能(AI)技术的突飞猛进,基于FITS的触觉传感器进入智能化发展阶段——AI技术不仅可用于优化传感器设计,还能够处理传感器产生的大量数据以实现更智能的应用功能,例如材料属性识别、运动轨迹分析、身份识别等。此外,基于FITS的触觉传感器还可作为生物接口拓展人机交互的维度,为假肢控制和康复训练提供更自然的感知通路。本课程深入讲解基于FITS的触觉传感器基础知识、关键技术(设计与制造)、应用实例。
课程提纲:
1. 柔性离电传感(FITS)概述:原理、特点、应用;
2. 基于FITS的下一代触觉传感器设计与制造;
3. 面向人形机器人应用的柔性触觉传感器实例;
4. 基于柔性触觉传感器的生物接口及人机交互;
5. 触觉感知与仿生智能技术总结与展望。
课程九:柔性自驱动触觉传感器及人机交互应用
老师:苏州慧闻纳米科技有限公司 董事长/苏州大学 教授 孙旭辉
2012年,王中林研究团队首次发明了摩擦纳米发电机(TENG),开辟了能量收集与自驱动传感的全新研究方向。基于摩擦起电和静电感应原理的摩擦纳米发电机,能够高效捕获环境中普遍存在的低频机械能(例如触碰、摩擦)并转化为电能,而且其输出信号可直接作为传感信息载体,实现“自驱动”感知功能。这一特性为开发无需外部供电的柔性触觉传感器奠定了基础,具有低功耗、绿色可持续和结构多样化等优势,可用于人机交互、电子皮肤、生理检测、运动监测等领域。柔性TENG可以在外界机械激励下直接产生电信号,其输出信号能很好地反映机械激励变化,并且对各种形式的机械运动均具备较好的适应性,可在无外部电源的情况下对压力、应变、剪切力及滑动等做出响应,因此被广泛认为是可穿戴传感器和机器人指尖触觉传感器的理想候选方案。近年来,为了满足人工智能(AI)及可穿戴健康医疗等领域日益广泛的应用需求,可拉伸、自愈合、生物兼容性高的新型自驱动触觉传感器相继问世,有望在智能时代中扮演“神经末梢”的关键角色。本课程详细讲解柔性TENG关键技术,以及基于TENG的自驱动触觉传感器及人机交互应用。
课程提纲:
1. 基于摩擦电的能量收集和传感技术;
2. 柔性摩擦纳米发电机(TENG)关键技术:从材料到设计和制备;
3. 基于TENG的压力传感系统和自驱动传感系统;
4. 基于TENG的触觉传感器及人机交互应用。
课程十:触觉传感器及具身智能应用
老师:北京航空航天大学 副研究员 余龙腾
触觉传感器是一类用于模拟或扩展生物皮肤触觉功能的器件,其基本作用是将外界的机械刺激、热刺激、甚至化学或材料表面特性等信息转化为可测量的电信号,从而助力机器人实现对外部环境的感知与反馈。近年来,柔性电子、纳米材料和微纳制造工艺的发展,使触觉传感器在灵敏度、空间分辨率及可集成性方面取得了显著进步。此外,在多自由度交互场景中,触觉传感器往往需要同时感知压力、剪切力、温度等多种刺激,然而不同物理量之间易产生耦合,导致信号混叠。为解决这一问题,多物理量解耦技术应运而生,包括基于结构分区的多通道传感器设计、基于材料特性的选择性响应策略,以及结合机器学习的信号解耦算法。如今,触觉传感器正在成为推动具身智能应用发展的关键驱动力:在灵巧手方面,触觉传感器帮助机器人实时感知抓取物体的力学状态,避免过度施力造成损坏,并通过摩擦与滑动信息实现稳定操作;在电子皮肤方面,柔性大面积触觉传感器能够赋予机器人全身感知能力,不仅用于安全防护和环境交互,还能通过多点触觉信息融合,提升机器人在复杂环境下的自适应能力。本课程详细讲授触觉传感器基础知识、关键技术、具身智能应用。
课程提纲:
1. 触觉传感器概述;
2. 仿生触觉传感原理;
3. 触觉传感器关键技术:多物理量解耦及超分辨技术;
4. 触觉传感器的具身智能应用:灵巧手、电子皮肤;
5. 触觉传感器技术总结与展望。
课程十一:视触觉传感器技术及机器人应用
老师:上海交通大学 副教授 胡开明
生物体通过感觉受体将外界刺激转化为神经信号,从而构建对环境的认知。其中,触觉和视觉是人类及哺乳动物获取信息的两个重要途径。触觉在黑暗环境中具有识别优势,但在空间分辨率和检测范围方面存在局限性;视觉则可提供高空间分辨率信息,却容易受到光照条件和复杂环境的影响。为结合两种感官的优势,研究人员开发出了可测量多种物理量(例如变形、力和滑动)的视触觉传感器(VBTS)——其利用光学方法从图像中提取接触信息,实现高空间分辨率触觉感知。由于采用光学方式进行信息传输,视触觉传感器不易受到电磁干扰,并且无需设计复杂的传感器阵列。相较于单纯的视觉感知,视触觉传感器的一个显著优势在于受遮挡、视野限制和光照不足等因素的影响较小,因而在实际应用中具有更高的可靠性和稳定性。作为一种创新的传感器,视触觉传感器拥有值得称赞的性能指标,并已在众多领域得到了广泛应用。本课程讲解近年来视触觉传感器从传感机制到应用场景的重大进展,注重阐述视触觉传感器的性能参数评估体系,包括关键性能指标(例如量程、空间分辨率、灵敏度等)、误差、时间参数、稳定性以及小型化等方面,以及传感器硬件和软件设计中提升性能的新策略。本课程还会介绍视触觉传感器目前的感知能力和机器人应用场景,例如物品识别、抓握控制、材料属性检测以及多模态感知。
课程提纲:
1. 视触觉传感器技术研究背景;
2. 视触觉传感器感知能力;
3. 视触觉传感器性能评价指标;
4. 视触觉传感器硬件设计;
5. 视触觉传感器软件设计:感知算法;
6. 视触觉传感器在机器人领域的应用;
7. 基于仿生褶皱的视触觉传感器及其爬行机器人应用。
六、师资介绍
王晓毅,博士,北京理工大学集成电路与电子学院教授、博士生导师,国家级海外高层次青年人才,MEMS与智能微系统研究所执行所长(2024),北京理工大学集成声光电微纳系统教育部工程研究中心副主任。他于2016年在浙江大学机械电子工程系获得硕士学位,2020年在香港科技大学机械与航空航天工程系获得博士学位,2020年获得香港政府Post-Dr Fellow资助从事博士后研究,2022年2月加入北京理工大学集成电路与电子学院。他拥有近十年MEMS/CMOS-MEMS传感器及其接口电路的研究经验,积累了丰富的科研成果,长期从事流量传感器、力学传感器、气体热导率传感器、热式传感器及声学传感器、柔性传感器的设计、制造与测试研究、集成传感器与高性能ASIC接口电路研究。作为项目负责人,他主持了多项国家级、省部级及企业资助项目,包括国家级海外高层次青年人才项目、国家自然科学基金青年项目、科技委XX3基金项目、科技部重点研发计划子课题、重庆市自然科学基金面上项目、北京市自然科学基金面上项目及华为人才资助计划项目等,累计经费超1000万元。此外,作为核心研发人员,他还参与了2项香港科技大学-麻省理工学院(HKUST-MIT)重大科研项目及1项科技委重点项目,经费近2000万元。他发表论文60余篇,其中以第一作者或通讯作者身份发表国际知名SCI期刊论文22篇,包括微纳传感器及接口电路领域的顶级期刊JSSC、Microsystems & Nanoengineering、JMEMS、EDL、ACS AMI及ACS Sensors等。此外,他以第一作者或通讯作者身份在MEMS领域顶级国际会议上发表会议论文11篇。
董林玺,博士,杭州电子科技大学二级教授,电子科学与技术/集成电路科学与工程学科博士生导师。他一直致力于智能传感器、传感算法、模拟集成电路设计等方面的研究工作。作为项目负责人,他承担国家重点/国家一般级项目8项、省部级项目10余项,重大横向(千万级)2项,参与国家级、省部级项目多项;完成企业研发项目10余项,产业化集成电路芯片、嵌入式系统等高科产品6项;在科研成果方面,以第一发明人授权国家发明专利20余项,以第一作者或通信作者在国际知名期刊IEEE Transactions on Industrial Informatics、Applied Physics Letters、Nano Energy、IEEE Sensors Journal以及国内知名刊物《电子学报》、Journal of Semiconductors等发表论文100余篇,EI会议论文/核心刊物论文多篇。
赵友,博士,西安交通大学副研究员、硕士生导师。他主要从事MEMS耐高温振动和压力传感器、智能制造切削力传感器与智能刀具研究。他主持国家级科研项目4项,省部级科研项目4项,参与国家级和省部级重大科研项目共4项,在材料科学和传感器技术领域国际权威期刊Ceramics International、Sensors and Actuators A: Physical、Journal of Materials Research and Technology等发表高水平学术论文27篇(其中SCI论文20篇,EI论文5篇),授权国家发明专利24项,登记软件著作权3项,“MEMS安保装置设计制造关键技术及其应用研究”获得陕西省国防科技进步二等奖。他聚焦航空航天领域重大应用需求,以应用基础研究为导向,致力于解决实际应用中存在的关键科学问题和工程技术难题。多项研究成果以专利权转让的形式实现在企业的转化应用。
潘明强,博士,毕业于哈尔滨工业大学,现任苏州大学副教授,江苏省双创博士、获教育部科技进步奖二等奖1项。他多年来一直围绕微纳传感制造方法与工艺装备、机器人触觉与力感知传感器、微纳精密机电装备等方面展开研究工作。他的团队先后完成国家青年基金、军委装备发展部预研基金、“863”科技支撑、国家重点研发计划等项目,并在微纳传感制造工艺、等离子体控制理论、工艺开发与调控、系统集成控制、多物理场分析、结构设计与优化、精密装备系统集成与应用等方面具有较好的研究基础。他培养研究生20余名,发表学术论文30余篇,授权发明专利50余项,转化成果7项。
高阳,博士,华东理工大学机械与动力工程学院教授、博士生导师,上海市智能感知与检测技术重点实验室副主任。2001年本科就读于华东师范大学,2008年获该校凝聚态物理硕士学位,2013年获美国内布拉斯加大学-林肯分校电气工程专业博士学位。他的主要研究方向为微纳制备及传感器技术,承担国家自然科学基金面上及青年项目、装备预研教育部联合基金、国家重点研发子课题等项目;入选国家青年人才、上海市“东方学者”特聘教授及上海市青年科技启明星等人才项目;以第一作者或通讯作者身份在Science Advances、Advanced Functional Materials等期刊发表SCI论文50余篇,授权中国发明专利12项,制修订地方标准1项;获2021年度中国石油和化学工业联合会科技进步一等奖、2020年度上海市科技进步一等奖、2019年度上海市“青年五四奖章”(个人)、2022年度上海市“青年五四奖章”(集体)等荣誉;担任上海市真空学会第十届理事、《西北工程技术》副主编、AI for Energy and Environment期刊编委、Frontiers of Optoelectronics期刊青年编委。同时,兼任民盟上海市委第十六届高教委委员。
魏大鹏,博士,中国科学院重庆绿色智能技术研究院研究员、博士生导师,机器人技术与系统中心主任,国科大重庆学院智能制造学院副院长,服务机器人共性技术及系统重庆市重点实验室副主任,中科院西部之光学者,重庆市杰出青年基金获得者,重庆市学术技术带头人,中国人工智能学会工委会委员,中国化工学会新材料委员会理事。他于2009年在北京大学电子系纳米器件物理与化学重点实验室获得博士学位。毕业后,先后在中国电子科技集团公司、美国普渡大学Birck纳米技术中心、中科院重庆研究院工作。他主要从事柔性力触觉传感技术的研究。迄今为止,他主持了科技部863子项、国家重点研发计划课题、国家自然科学基金、重庆市杰出青年基金等科研项目,在SCI期刊上发表论文100余篇,申请发明专利五十余项,获得吴文俊人工智能科技进步奖一等奖一项(第一完成人)、重庆市技术发明一等奖(第三完成人)、重庆市自然科学二等奖(第一完成人)、上海市自然科学二等奖(第二完成人)等奖励。
吴化平,博士,浙江工业大学教授、博士生导师,余杭智能制造与技术研究院副院长,高端激光制造装备省部共建协同创新中心专职副主任。2009年博士毕业于哈尔滨工业大学,同年进入浙江工业大学工作,主要从事仿生智能机械、柔性电子器件、多功能传感器、视触觉融合多模态感知与软体机器人方面的研究工作。他目前担任浙江省力学学会理事,获浙江省杰出青年基金项目及延续项目支持,共主持国家重点研发项目课题1项,国家自然科学基金5项,在PNAS、Science Advances、Nature communications、Advanced Functional Materials、Nano Energy、npj Flexible Electronics、ACS Nano、JMPS、APL、Soft Matter、Langmuir等学术知名期刊上发表SCI收录论文100余篇,授权发明专利20余项。他曾荣获全国徐芝纶力学优秀教师奖、入选“浙江省高校领军人才培养计划”、高等学校“院士结对培养青年英才计划”、浙江省“新世纪151人才工程”、浙江省高校中青年学科带头人;获得中国商业联合会全国服务业科技创新二等奖、中国商业联合会科学技术奖三等奖等奖励。
潘挺睿,博士,中国科学技术大学讲席教授,苏州医疗器械创新研究院执行院长,入选国家级领军人才,教育部“长江学者”讲席教授,美国医学与生物工程院(AIMBE)Fellow,英国皇家化学学会(RSC)Fellow,归国前为美国加州大学戴维斯分校终身正教授。本科毕业于清华大学,博士毕业于美国明尼苏达大学,2006年起受聘于加州大学戴维斯分校生物医学工程系,期间担任加州大学微纳米制造中心(CNM²)和GREAT国际研究交流项目主任。2021年初回国,全职加入中国科学技术大学(苏州),筹建其首个医工交叉的新型研发机构—医疗器械创新研究院(iMED),并被国内外多所知名高校与科研院所聘为客座教授。他带领的科研团队于2011年在国际上首次提出柔性离电传感机理(FITS | Flexible Iontronic Sensing),其拥有包括超高灵敏度、超薄柔性、超高光学透明度、环境可集成性等多项独特的性能优势,目前已成为第四代柔性触觉感知的核心技术。他因此荣获了包括美国科学基金会(NSF)杰出青年奖(CAREER)和科技前沿创新奖(EFRI)、施乐(Xerox)基金会奖、全球消费电子(CES)创新奖、加州大学杰出贡献奖和杰出青年教授奖、中国自然科学基金海外合作基金、中国创新创业大赛一等奖等诸多重要奖项。
孙旭辉,博士,苏州大学纳米科学与技术学院教授、博士生导师。他拥有清华大学理学学士、硕士学位,香港城市大学材料学博士学位,加拿大西安大略大学博士后,曾就职于美国国家宇航局(NASA)Ames研究中心纳米技术中心、NASA Ames研究中心先进研究实验室研究员及美国圣塔克拉拉大学兼职助理教授。他一直致力于纳米半导体材料和纳米功能器件及其在电子信息、光电器件、传感器芯片及新能源方面的应用研究。他现已在SCI收录国际期刊上发表论文250余篇,他引13000余次,H-index 70。他获得美国专利3项,PCT专利2项,授权中国发明专利60余项,担任国际杂志IEEE Transaction on Nanotechnology副主编,Frontiers in Materials、Nanomaterials编委会委员,担任十四五国家重点研发计划“智能传感器”专项总体组专家,国家同步辐射实验室用户委员会副主任、上海光源用户委员会专家委员、上海软X射线自由电子激光装置用户委员会委员,国家纳米标准委员会苏州工作组副组长、江苏省纳米技术标准化技术委员会副主任委员、国际标准IEC/SC59N/JWG4组成员、全国微机电标准化委员会委员,中国化工学会化工安全专业委员会委员,中国老年学和老年医学学会老年慢病规范诊疗分会常务委员。他承担了国家重点研发计划项目、重大专项课题项目、国家基金委重点项目、重大研究计划培育项目、面上项目负责人等多项,还参与了国家863重大项目、国家02专项等。他于2014年创立苏州慧闻纳米科技有限公司,担任公司董事长兼首席科学家。公司专注于先进智能传感器芯片的研发生产,并已建成气体传感芯片和柔性薄膜压力传感器量生产线,开发了世界上首个产品化的便携式人工嗅觉平台。
余龙腾,博士,北京航空航天大学副研究员,2015年6月本科毕业于华中科技大学力学系,2019年12月博士毕业于新加坡国立大学生物医学工程系,是中国力学学会、中国生物医学工程学会、中国计算机学会会员。他的研究方向为柔性传感器、可穿戴技术、仿生触觉感知。他主持国家自然科学基金青年项目、浙江省自然科学基金探索项目等科研项目。发表SCI论文20余篇,H-index 17,授权国家发明专利6项。相关研究成果获《海峡时报》、《浙江日报》、《瞭望》、亚洲新闻台、新加坡8套、浙江卫视等媒体报道。他曾获新加坡生物医学工程协会金奖、工程医学全球创新大赛最具创新奖、“春晖杯”中国留学人员创新创业大赛优胜奖,中国计算机学会《具身智能》前沿论坛Best Poster、Wiley中国高贡献作者奖等奖项。他是可穿戴技术公司Microtube Technologies联合创始人,还担任Soft Science、《应用力学学报》等学术期刊青年编委。
胡开明,博士,上海交通大学副教授、博士生导师,加州大学伯克利分校联合培养博士,2021年晋升为副教授。他主要从事柔性微纳机电系统力学设计与控制研究,成果在Science Advances、Nature Communications、Cell姊妹刊Matter、National Science Review、Science Bulletin、Advanced Materials、Applied Physics Reviews、ASME Journal of Applied Mechanics等国内外期刊上发表论文63篇(一作/通讯33篇,IF>10论文20篇,封面论文1篇,Editor's Highlights论文1篇),引用1100余次,发明专利18项。他主持国家自然基金面上/青年项目、国家重点研发计划子课题、上海市自然科学基金等项目10余项;出版专著《MEMS/NEMS谐振器技术》1部,参编英文专著1部。他荣获2023年Microsystems & Nanoengineering优秀青年科学家奖(Nature子刊颁发)、入选2022年上海科技青年35人引领计划、上海市力学学会优秀青年学者(2021)、中国博士后创新人才支持计划(2018)等;担任期刊International Journal of Dynamics and Control青年编委、Micromachines特邀编委、Journal of Bionic Engineering青年编委、《动力学与控制学报》客座主编等。
七、培训费用和报名咨询
报名咨询:请发送电子邮件至BISainan@MEMSConsulting.com,邮件题目格式为:报名+力学传感器及触觉感知+单位简称+人数。
报名网站:https://www.memstraining.com/training-74.html
培训赞助:请致电联系毕女士(18921125675),或麦姆斯咨询固话(0510-83481111)。
麦姆斯咨询
联系人:毕女士
电话:18921125675
邮箱:BISainan@MEMSConsulting.com
上一篇:第73期“见微知著”培训课程:薄膜铌酸锂技术及光子学器件
下一篇:最后一页