基于陶瓷颗粒的传感器材料,可用于软体机器人皮肤
2024-11-16 09:30:38 来源:麦姆斯咨询 评论:0 点击:
这种软体陶瓷传感器可以“感知”温度、应变、压力、湿度等,这使得其在医学和软体机器人领域都颇具应用价值。
大多数人在听到“陶瓷”这个词时,会想到咖啡杯、浴室瓷砖或花盆。但Frank Clemens想到的可不是这些。对于这位瑞士联邦材料科学与技术研究院(EMPA)高性能陶瓷实验室(Laboratory for High-Performance Ceramics)的研究小组负责人来说,陶瓷可以导电,具有实现智能化的潜力,甚至能像人类皮肤一样,具备“感知”能力。
据麦姆斯咨询报道,近期,Frank Clemens和他的团队正在开发一种基于陶瓷的软体传感器材料。这种软体陶瓷传感器可以“感知”温度、应变、压力、湿度等,这使得其在医学和软体机器人领域都颇具应用价值,相关研究论文以“Sensor-Embedded Muscle for Closed-Loop Controllable Actuation in Proprioceptive Biohybrid Robots”为题发表在《先进智能系统》(Advanced Intelligent Systems)期刊上。
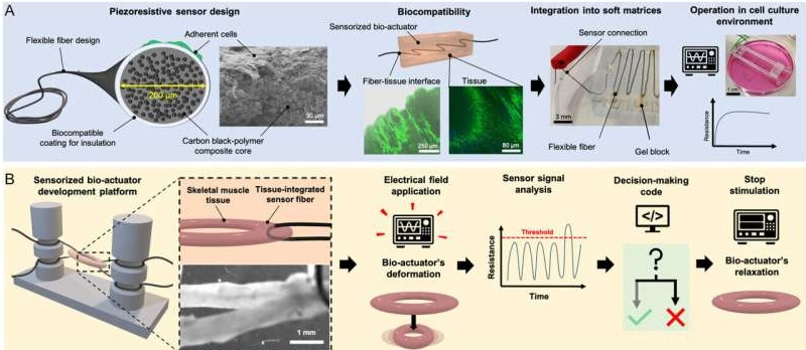
基于骨骼肌组织的生物驱动器本体感觉系统的实现:(A)该机械传感器使用一种压阻复合材料,被设计为硅橡胶绝缘纤维。该纤维具有诸多优势:良好的传感性能、在软体机制中的可集成性、在工程骨骼肌组织中的生物相容性以及在细胞培养环境中的可操作性;(B)当与生物驱动器组装在一起时,该机械传感器显示出由电刺激触发的微运动,并不受外加电场的干扰,并且该机械传感器信号可用于调节肌肉电刺激装置提供的刺激脉冲。
软体陶瓷——这是如何实现的呢?像Frank Clemens这样的材料科学家将陶瓷定义为一种无机的非金属材料,这种材料是通过一种被称为烧结的高温工艺,由一堆松散的颗粒制备而成。
陶瓷的成分多种多样,其性能也会因此发生变化。但是在Frank Clemens的实验室里却看不到陶器和瓷器。研究人员主要使用诸如铌酸钾钠(KNN)和氧化锌之类的材料,还会用到碳颗粒进行研究。由于这些材料没有一种是柔软的,所以为了将它们制成软体陶瓷传感器,研究人员将陶瓷颗粒嵌入到可拉伸塑料之中。
Frank Clemens说:“我们研究的是所谓的高填充系统,我们选取一种由热塑性塑料制成的基质,然后在不影响基质弹性的前提下,尽可能多的往里面填充陶瓷颗粒。”
如果这种高填充的基质随后被拉伸、压缩或暴露于温度波动的环境中,陶瓷颗粒之间的距离就会发生变化,软体陶瓷传感器的电导率也会随之改变。Frank Clemens强调,没有必要用陶瓷将整个基质填满:通过3D打印技术,研究人员还可以将软体陶瓷传感器作为一种“神经”嵌入软体组件中。
智能化和选择性反应
软体陶瓷传感器的制造并不那么容易。通常,软体陶瓷传感器可以同时对不同的环境因素表现得很敏感,例如温度、应变、湿度等。Frank Clemens说:“如果人们想在实践中使用它们,必须首先明确自己想要测量的物理量是什么。”他的研究小组已经成功地制造出只对压力或温度有选择性反应的软体陶瓷传感器。

Frank Clemens及其团队开发了基于陶瓷颗粒的软体智能传感器材料
Christopher Bascucci展示了一种可用于软体陶瓷传感器强化的软体材料
研究人员将这些软体陶瓷传感器集成到一只假肢手中。该假肢手能“感知”其手指的弯曲情况,并在接触到高温表面时有所察觉。这种“敏感度”不管对于机器人抓取工具还是人类的假肢来说都是一个优势。
瑞士联邦材料科学与技术研究院团队在开发柔软的“机器人皮肤”方面更进了一步。这种多层塑料传感器与人类皮肤类似,能对触摸和温差做出反应。
为了评估这些复杂的数据,瑞士联邦材料科学与技术研究院与剑桥大学(University of Cambridge)的研究人员共同开发了一个人工智能(AI)模型,并使用大约4500次测量所获得的数据对其进行了训练。这也使人们联系到人类的感知过程——人类皮肤上的神经冲动在大脑中被评估和推断。
在他们最近的项目中,研究人员成功地将软体陶瓷传感器与人造肌肉相结合。他们与苏黎世联邦理工学院(ETH Zurich)和东京大学(University of Tokyo)的研究人员一起开发了一种生物混合机器人,该机器人借助柔软的、具有生物相容性且与组织集成的压阻式传感器来识别其收缩状态。
人机之间的安全协作
Frank Clemens说,这样做的目的是让人类和机器能够安全、和谐地协同工作。他解释说:“如今的机器人系统体积庞大、笨重,并且‘力量’强大。它们可能会对人类造成伤害”。如果将来我们要越来越多地与机器人共享工作场所,那么它们应该要能对触碰做出快速而敏感的反应。
Frank Clemens继续说:“如果人们不小心触碰到人类同伴,他会自动缩回手,我们想赋予机器人同样的反射动作。”
研究人员目前正在寻找机器人抓取系统领域的工业合作伙伴。但软体陶瓷传感器在医学上也有需求——该团队最近与IDUN Technologies完成了一个瑞士科技创新署(Innosuisse)的项目,在该项目中,他们制造出了用于脑电波测量的软体电极。
这项工作远未结束:研究人员希望使他们的软体陶瓷传感器变得更加“敏感”和“智能”。这需要将新的陶瓷材料和软体聚合物相结合,并优化软体陶瓷传感器性能。这样研究的成功秘诀在于这两种成分之间的相互作用。
延伸阅读:
上一篇:基于光子晶体的应变传感器利用颜色变化监测建筑物结构安全
下一篇:电容式MEMS六轴力和力矩传感器:大量程、高灵敏度、低串扰