综述:固态激光雷达原理及基于超构表面的激光雷达传感器
2026-03-28 06:32:33 来源:麦姆斯咨询 评论:0 点击:
本文探讨了超构表面光束偏转机制的基本原理,并阐述了超构表面如何调控入射光的相位和偏转角度。基于超构表面的激光雷达凭借其平面光学特性、鲁棒性以及无机械运动部件等特性,提供了极具前景的解决方案。
激光雷达(LiDAR)已成为自动驾驶汽车领域极具前景的解决方案。在光束偏转机制方面,采用微机电系统(MEMS)和光学相控阵(OPA)的固态激光雷达,已被证明是相较于采用360°旋转反射镜的机械式激光雷达更加稳健且紧凑的替代方案。二维(2D)光学超构表面可通过调控相移来改变激光雷达的光束偏转角度。如果激光雷达系统仅需固定光束方向,则可采用静态超构表面;如果激光雷达系统需要光束扫描,则必须使用动态(可调谐)超构表面以实现高效和灵活的操作。
据麦姆斯咨询报道,近日,美国桥水州立大学(Bridgewater State University)研究团队在Sensors期刊上发表了题为“A Review of Solid-State LiDAR Principles and Metasurface-Based LiDAR Sensors”的综述论文,探讨了超构表面光束偏转机制的基本原理,并阐述了超构表面如何调控入射光的相位和偏转角度。基于超构表面的激光雷达凭借其平面光学特性、鲁棒性以及无机械运动部件等特性,提供了极具前景的解决方案。此外,研究人员还讨论并比较了基于超构表面的激光雷达的视场角(FOV)。激光雷达系统中的可调谐超构表面对于实时光束扫描至关重要,与传统机械扫描机制相比,它具备扫描速度更快、可靠性更高、结构更紧凑以及视场角更宽广等显著优势。
激光雷达原理
假设目标为理想朗伯体(hard-Lambertian object),接收器收到的激光雷达信号可按以下方式计算:朗伯表面是指一种物理表面,无论从何种角度观测,都能将光线均匀地反射向各个方向。存在两种典型方案(如图1):(a)接收器视场角全覆盖(FOV-filled),即整个接收范围被入射信号完全覆盖;(b)接收器视场角未完全覆盖(FOV-underfilled),即接收器感光面积大于输入信号范围且未被完全覆盖。
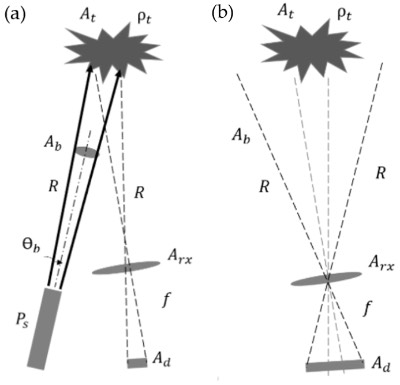
图1 理想朗伯体两种方案示意图
飞行时间(ToF)激光雷达的工作原理是测量从发射器(TX,即激光器)发射的光脉冲经目标物体反射到接收器(RX,探测器)所检测到的时间间隔。幅度调制连续波(AMCW)激光雷达采用连续激光束代替脉冲激光束;AMCW激光雷达测量发射器调制幅度与接收器探测到的幅度之间的相位差。频率调制连续波(FMCW)激光雷达则使用频率在特定范围内振荡的连续激光束;FMCW激光雷达采用相干探测技术,即将接收器探测到的频率与发射器发出的参考信号频率进行比较。
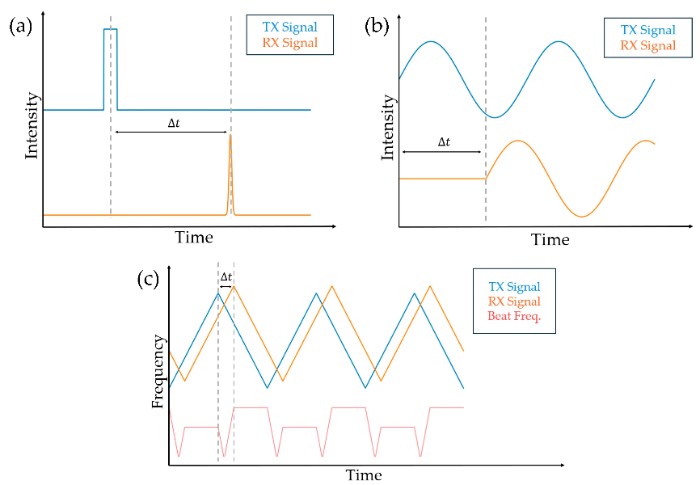
图2 三类激光雷达的探测原理对比
激光雷达扫描平台
机械扫描式激光雷达系统由处理器控制电机驱动旋转镜,该旋转镜具有脉冲激光系统,从而实现360°视场。图3展示了机械式激光雷达的示意图。该技术的优点在于其历史悠久且技术最成熟,但其笨重的结构限制了可扩展性。如果缺乏合适的光学元器件,可能需要配备多对激光器和探测器,这也导致其成本高昂。
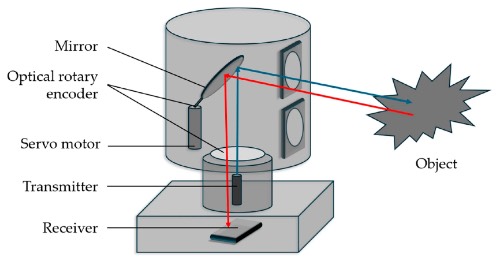
图3 机械扫描式激光雷达系统示意图
第二种技术路线是微机械或MEMS激光雷达,利用基于MEMS的反射镜来扫描环境。如图4所示,其采用一维(1D)MEMS反射镜与多台激光器,生成垂直光线并实现水平扫描。该技术已达到半成熟阶段,与机械旋转式激光雷达相比,其制造可扩展性更强、成本更低,但在车规可靠性方面存在挑战。
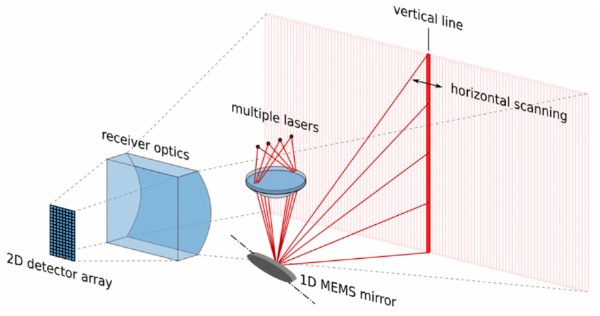
图4 MEMS激光雷达系统示意图
第三种技术路线是采用集成光子学与OPA相结合的固态激光雷达。OPA由激光器和用于分光的功率分路器构成。图5展示了OPA的示意图。OPA系统是目前成本最低、鲁棒性最强的激光雷达方案。其硅基制造技术非常成熟,这也允许极高的制造可扩展性,尽管这些器件的设计技术仍受到一定限制且处于半成熟阶段。
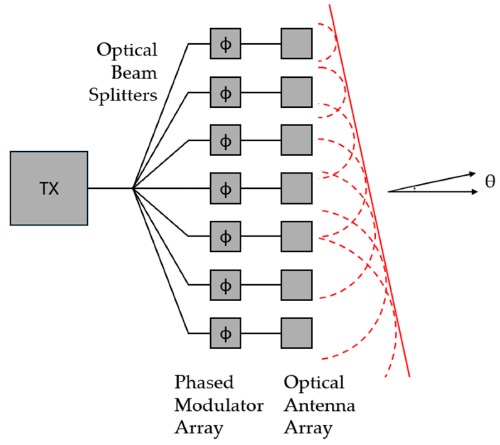
图5 OPA激光雷达系统示意图
超构表面
超构表面是一种人工设计的二维结构,由周期性或准周期性排列的亚波长结构单元组成,这些亚波长结构单元可在其界面处灵活调控光的振幅、相位或偏振。与制备难度大的传统三维(3D)超构材料不同,超构表面具有平面化平台和紧凑型结构,因此更易集成到其它光电子和光子系统中。
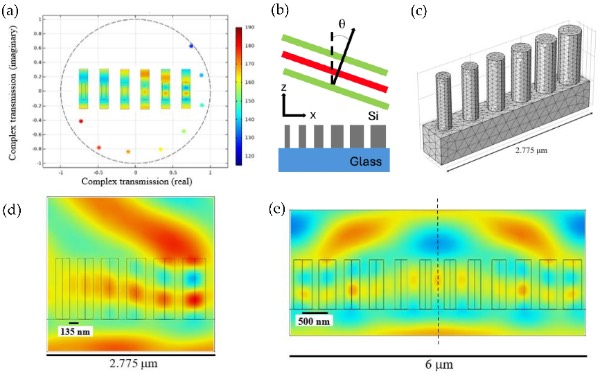
图6 用于光束偏转的硅基超构表面设计
超构表面依赖于先进的光刻技术(例如电子束光刻、等离子体蚀刻、原子层沉积)制备而成。根据设计标准,部分超构表面在制备完成后即具有固定的光学电磁响应,这类结构称为静态超构表面。反之,如果超构表面被设计成为可在制备后可通过外部激励来改变其功能,这类结构则称为动态(可调谐)超构表面。
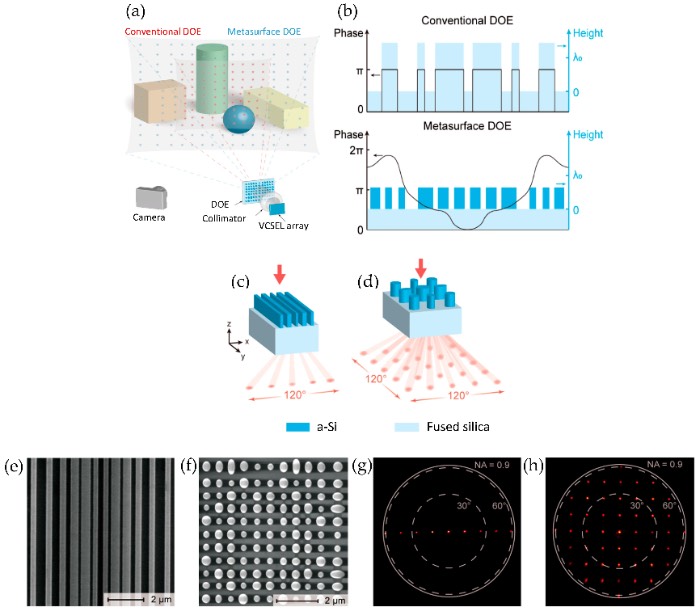
图7 超构表面示例
静态超构表面为特定应用(例如具有预设功能的镜头、滤光片和偏振器)提供固定的波前调控能力。静态超构表面可作为超构透镜用于光束偏转,可提供超过150°的宽视场角。此外,静态超构表面还可用于回波信号带通滤波、光束分割与合并以及光束整形。
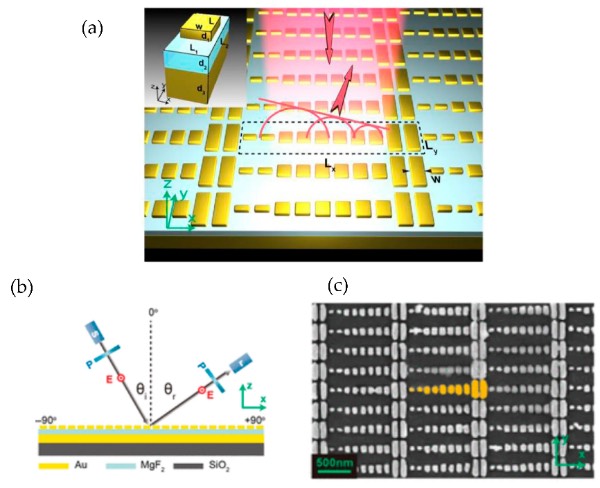
图8 静态超构表面示例
动态(可调谐)超构表面为紧凑、高速、高分辨率的激光雷达系统提供可变化的光束偏转与波前调控。动态超构表面材料的光学特性可以通过电、热、光和机械等外部激励来调控,从而实现快速、高效且精确的光调制。
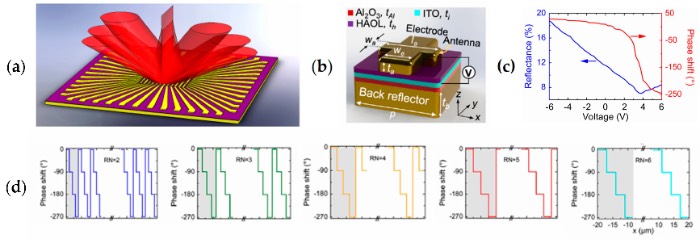
图9 动态(可调谐)超构表面示例
基于超构表面的激光雷达传感器
这篇综述中介绍了多项基于超构表面的激光雷达研究进展。Chang等研究人员通过将超构透镜与硅光子微环发射器阵列相结合,实现了二维光束偏转(如图10a)。Martins等研究人员展示了利用大面积超构表面作为窄视场(low-FOV)光源的偏转角放大器,可实现150°的宽视场(如图11a)。Park等研究人员演示了电可调谐超构表面阵列的360°连续扫描,该阵列探测距离可达4.7 m;该系统采用带铝镜的纳米谐振器作为单端口谐振器,并测得其反射系数r(如图12a)。利用超构表面作为偏振分束器以增强系统视场,从而实现精确的距离测量和速度测量(如图13a)。
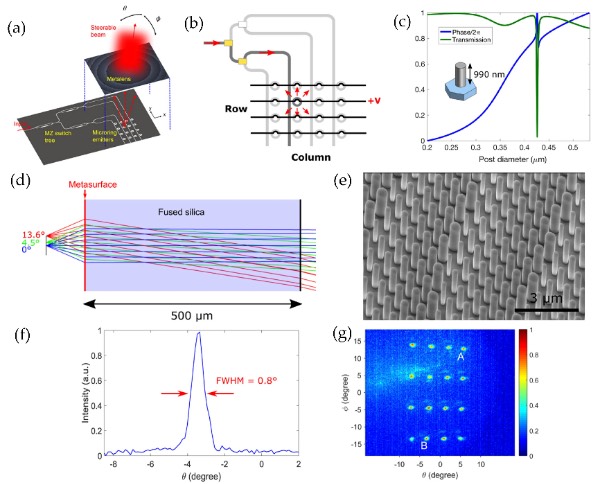
图10 Chang等人研发的基于超构表面的激光雷达传感器
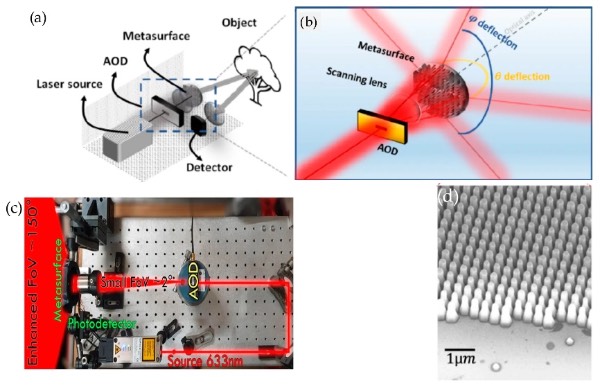
图11 Martins等人研发的基于超构表面的激光雷达传感器
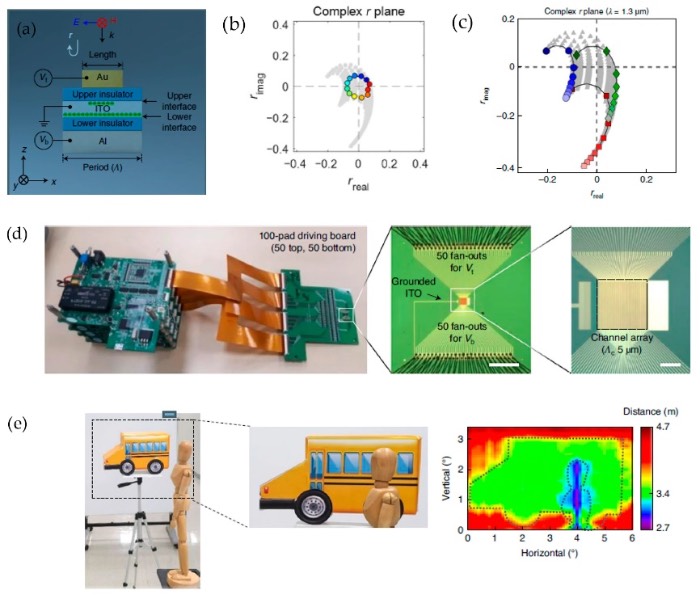
图12 Park等人研发的基于超构表面的激光雷达传感器
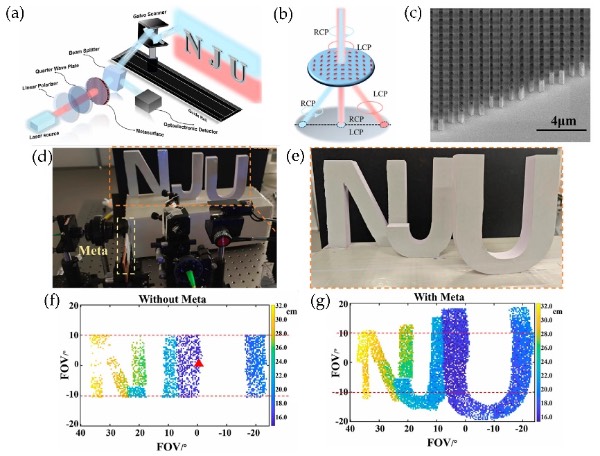
图13 基于超构表面的激光雷达传感器示例
总结及展望
展望未来,为实现紧凑、高速且低成本的激光雷达,需将III-V族激光二极管、超构表面光束转向平台以及高速探测器集成于单芯片上。尽管硅基超构表面和锗基探测器可直接在硅衬底上单片生长,但III-V族激光二极管的集成却颇具挑战。目前,诸如单片集成和异质集成等III-V族激光器在硅平台上的集成技术已得到广泛研究,以实现激光器结构的有源区与硅材料的高效耦合。将垂直腔面发射器(VCSEL)等III-V族激光器倒装键合至硅平台,可实现高输出功率、低阈值电流及稳定运行。总体而言,在硅平台上实现硅基超构表面与III-V激光器的异质集成,是未来固态激光雷达传感应用极具潜力的解决方案。
论文链接:https://doi.org/10.3390/s26010001
延伸阅读:
上一篇:综述:太赫兹MEMS执行器及应用
下一篇:最后一页