基于FMCW激光雷达技术的大面阵4D成像传感器
2026-03-20 21:00:26 来源:麦姆斯咨询 评论:0 点击:
研究人员基于全芯片级光电集成技术,实现了一种大面阵相干激光雷达FPA。研究团队围绕该FPA构建了用于采集点云数据的四维(4D)成像相机。
对动态环境进行详细而准确的三维(3D)测绘,对于机器与周围环境的交互和人机交互来说至关重要。尽管科研界已为开发面向3D感知的CMOS图像传感器投入大量精力,但兼具可扩展、高性能与可靠性的解决方案始终仍难以实现。采用调频连续波(FMCW)激光雷达(LiDAR)技术的焦平面阵列(FPA)传感器,有望同时满足上述所有需求,并且还能直接测量径向速度,将其作为第四维度。尽管此前相关研究颇有前景,但尚未达到商业应用所需的阵列规模与性能。
据麦姆斯咨询报道,近日,瑞士Pointcloud公司研究人员基于全芯片级光电集成技术,实现了一种大面阵相干激光雷达FPA。研究团队围绕该FPA构建了用于采集点云数据的四维(4D)成像相机。其核心为352 × 176像素的二维(2D)FMCW激光雷达FPA,由超过60万个光子元件组成,所有光子元件均与相关电子电路元件集成在同一颗芯片上。与此前研究相比,该器件的像素数量提升了五倍。像素架构采用单站(monostatic)构型,在单个像素内集成发射和接收光路,并集成了相干探测器和电子电路元件。研究人员通过集成驱动和校准电子电路元件的平面热光开关,将频率调制光依次导向不同像素组。集成的串行数字接口同步控制光开关和读出。研究人员通过实验展示了4至65米范围内目标物体的点云成像,其像素积分时间可支持3到15帧/秒(fps)的帧率。研究成果证明了该FMCW激光雷达FPA传感器是实现通用、低成本、紧凑型相干4D成像相机的核心技术。相关成果以“A large-scale coherent 4D imaging sensor”为题发表于Nature期刊。
4D成像架构
图1a展示了所提出的集成FMCW激光雷达相机系统。探测所用的FMCW光是通过将波长1310 nm的二极管激光器耦合至硅光子同相/正交(IQ)马赫-曾德尔调制器(MZM)产生的。当IQ调制器偏置于单边带模式并抑制载波时,通过施加外部线性射频(RF)调制,可实现对光信号频率的线性调制;随后该调频信号经放大并耦合至FPA中(图1b)。利用具有上调频和下调频的FMCW光源,可以同时测量目标的距离与径向速度。
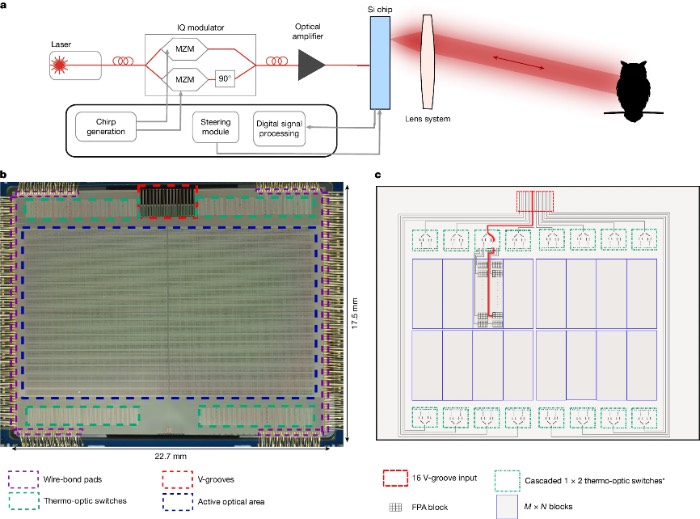
图1 单站4D成像传感器架构
图2a展示了该FMCW激光雷达FPA模块示意图。整个开关链路的校准通过集成在每级末端的监测光电二极管完成。在单相干像素架构中,发射调制光的同一组光栅耦合器,同时收集来自目标的散射光。这种探测构型被称为单站构型,其本质上可防止像素间的光学串扰。与双站(bistatic)构型不同,单站构型仅需一个成像透镜,且无需对接收和发射光路进行校准。通过调整各像素光栅耦合器对的面外发射角和面内旋转角度,提升了目标之间的光耦合效率。通过直接在芯片上沉积定制设计的凹微透镜,进一步提高了收集效率(如图2c)。
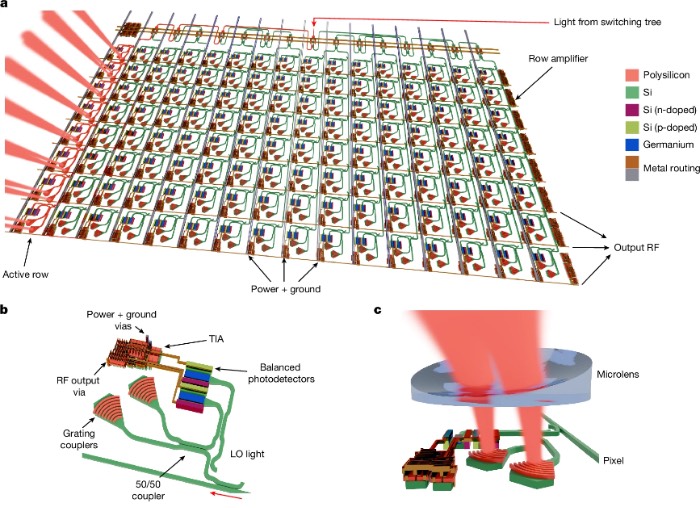
图2 相干集成光子FPA示意图
系统性能
图3展示了相干4D成像系统的性能。研究人员利用商用、未经优化的短波红外(SWIR)相机来对静态和动态场景进行成像。在图3a中,每个像素点的距离信息通过一组各为32 μs的上下调频脉冲提取得到。使用8个并行读出通道获取图3d所示的整个场景仅需1秒钟,对应帧率为1 fps。实验结果体现了该系统的实时4D成像能力,单点成像仅耗能11 nJ。
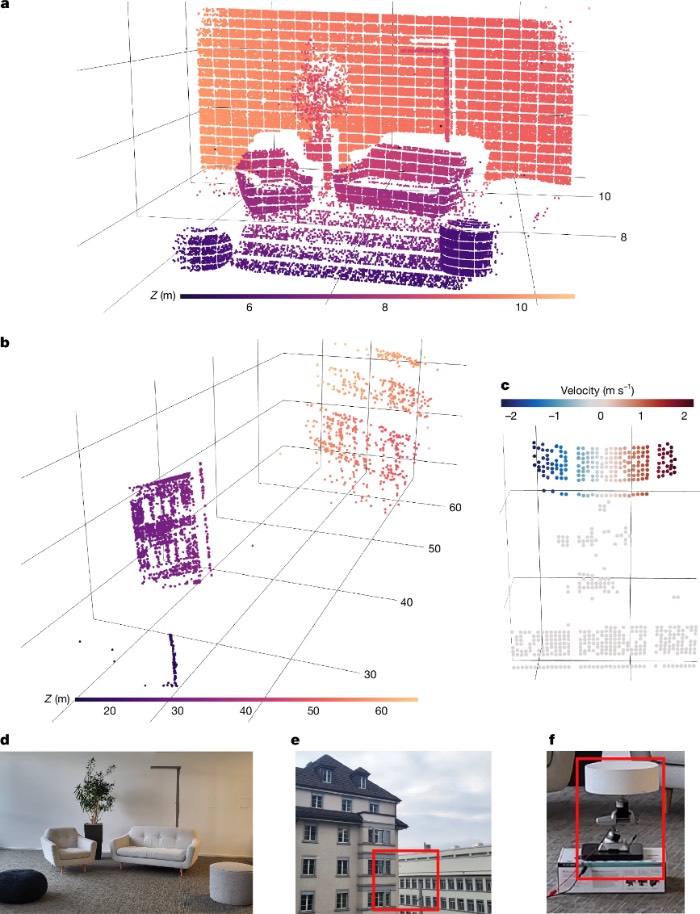
图3 点云成像示例
单次测量的信噪比取决于多种因素,例如发射功率、本振(LO)功率、光束尺寸和质量、调频线性度、积分时间以及激光线宽。为了接近散粒噪声的极限,可以合理配置LO光功率和跨阻放大器(TIA)增益,使散粒噪声主导放大器热噪声。研究通过每行末端的监测光电二极管测量到达每个像素的光功率,并根据无源分光器的测量分光比进行校准,相关测量结果如图4所示。
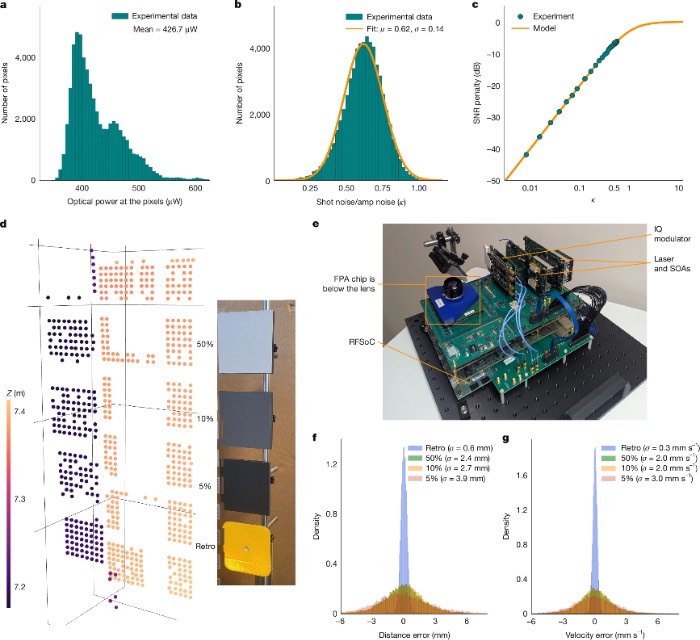
图4 4D成像激光雷达系统的精度与噪声性能
总结及展望
综上所述,这项研究展示了一种高可扩展、完全集成的4D成像FPA传感器,分辨率352 × 176像素,径向范围为65 m,角分辨率为0.06°,单点能耗低至46 nJ,每像素平均入射光功率仅为178 μW。凭借其接近QVGA(四分之一视频图形阵列)分辨率和超过60万个光子元件,该相干4D成像传感器是目前最大面阵的相干激光雷达FPA,其像素数量是此前相关研究的五倍。这使得该传感器的分辨率可满足大多数应用场景的需求。此外,这项研究是首次将所有相关电子电路元件都集成于芯片上的大面阵相干激光雷达FPA。得益于其低发射光功率和单站像素设计的模块化结构,该FMCW激光雷达FPA同时满足了不同应用的严格要求,例如人眼安全性、高性能、实际环境可靠性以及模块制造的简便性。与CMOS相机类似,该系统在测距、视场角(FOV)和角分辨率等方面具有高度灵活性,这些特性可通过所选光学元件灵活适配。
论文链接:https://doi.org/10.1038/s41586-026-10183-6
延伸阅读:
上一篇:结合图像传感器与6轴惯性传感器,索尼稳定器LSI实现全新防抖效果
下一篇:综述:面向下一代光学成像的先进超构表面设计