MIT和DARPA联手研发出比硬币还小的芯片级激光雷达
2016-08-05 20:21:28 来源:微迷 评论:0 点击:
激光探测与测距,或者说是激光雷达(Lidar),是一种基于激光的感知技术。它类似于雷达(radar),但是分辨率更高,因为光的波长大约比无线电的波长小10万倍。

在MIT的光子微系统组(Photonic Microsystems Group),本文作者正在开发一种片上激光雷达( lidar-on-a-chip )系统,它比一角硬币还小,没有活动式零件,而且能以低成本进行大规模生产,可用于自动驾驶汽车、无人机和机器人。
激光探测与测距,或者说是激光雷达(Lidar),是一种基于激光的感知技术。它类似于雷达(radar),但是分辨率更高,因为光的波长大约比无线电的波长小10万倍。这对机器人很重要:因为雷达不能精确地反映细微的特征,只装备了雷达模块的机器人很难捕捉复杂的物体。目前,Lidar主要应用于自动驾驶汽车和机器人,也用于绘制陆地和海洋的地图以及无人机。对于几乎所有自动驾驶汽车,以及在商业或工业环境中自动化操作的机器人而言,Lidar系统是必不可少的。
Lidar系统测量3D空间中每个像素到发射器间的距离和方向,这能通过传感器创造出真实世界完整的3D模型。操作Lidar系统的基本方法是发射一束光,然后测量光在物体表面反射而返回来的信号。Lidar模块接收到反射回来的信号所需的时间提供了一种直接测量Lidar系统与物体之间的距离的手段。关于物体的额外的信息,比如它的速率或材料成分,也可以通过测量反射回来的信号中的某些特性而得以确定,这些特性包括诱导多普勒频移(induced Doppler shift)。最后,通过操控发射出去的光,可以测量出环境中许多不同的点,从而创建出完整的3D模型。
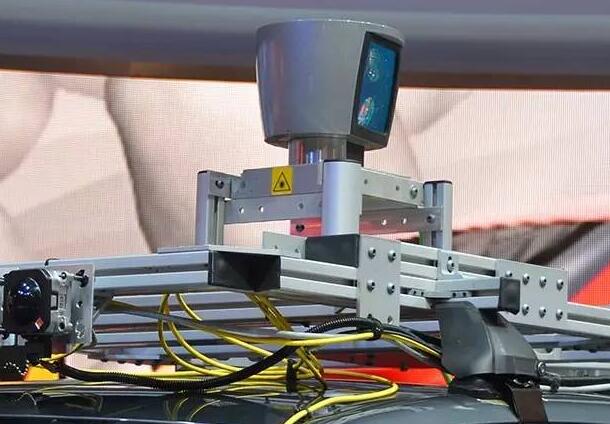
Velodyne HDL-64 Lidar镶嵌在自动驾驶汽车上。这个设备使用了能机械地四处旋转的激光器/接收器模块,这种方法限制了系统的扫描率,同时增加了扫描范围、复杂性和成本。
大多数Lidar系统——比如你通常能在自动驾驶汽车上看到的Lidar系统——使用离散的自由空间光学组件,比如激光器,透镜和外部服务器。为了找到一个有用的观察视野,激光器/接收器机械地四处旋转,通常还会上下振动。这种机械装置限制了Lidar系统的扫描率,同时增加了扫描的范围和复杂性,导致人们担心其长期可靠性,尤其是在恶劣的环境中。现在,市场上销售的高端 Lidar 系统价位在一千美元到七万美元之间,这会限制它们在成本最小化领域内的应用。
自动驾驶汽车和机器人等应用领域过度依赖Lidar,而且昂贵的Lidar模块是阻碍其应用于商业产品的主要因素。我们在MIT的光子微系统组中的工作是尝试将这些大型的、昂贵的、机械的Lidar系统融合在一个微芯片上,实现在商业化CMOS生产车间里的大规模生产。
我们使用300毫米晶圆生产Lidar芯片,让潜在的生产成本大约为每个芯片10美元,每年单位生产量可达到百万台。这些片上设备用非机械化的光束进行操控,在速度上比当前机械的Lidar系统所能达到的速度快一千倍,而且允许更快的图像扫描速率。这对精确追踪微小的高速运动的物体是有用的,这些物体只在Lidar的视野中短暂出现,对于高速前行的无人机避开障碍物而言至关重要。
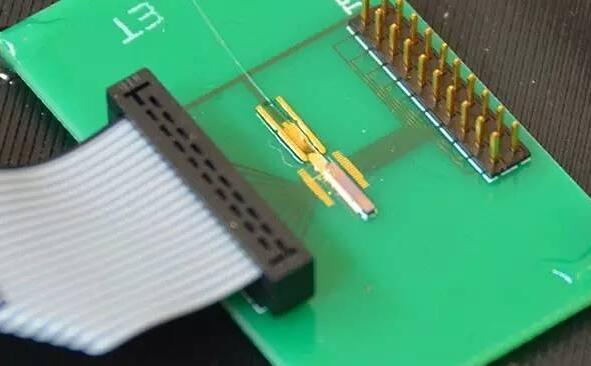
2016年5月份,MIT的原型Lidar芯片在DARPA的五角大楼演示日上的展示
在MIT,我们的此项工作首先从300毫米硅光子(silicon photonics)的发展入手的。硅光子学是一种使用横截面为几百纳米的硅波导管去创建「光用电线」的芯片技术,其特性类似于光学纤维,但是它们的尺寸更小。然后将这些波导管融合进芯片上的光子线路。将电子与硅光子类比,这就像将分离的电器元件(比如铜导线和电阻器)融合进带有铜线路以及纳米晶体管的微芯片里。
微电子技术,特别是CMOS技术,已经支持大量生产更小的复式电子电路,并且在电子工业中,硅光子有代替微电子的潜能。硅光子能利用商业CMOS生产车间技术,这也是开发电脑硅基微处理器的技术,能够以级低的成本进行量产。在过去的十几年里,几个CMOS生产车间已经研发出独立的硅光子制造工艺。通过该制造工艺,波导管损耗和光学隔离等基本问题得到解决,并且现在该技术支持构建复式光子系统。
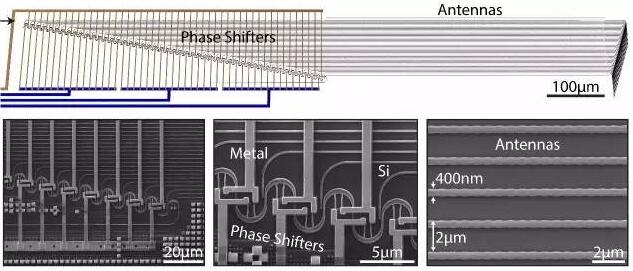
一幅MIT固态Lidar的扫描电子显微镜图。该设备使用热移向器,通过激光传输来加热波导管,改变了通过它们的光的速度与相位。硅上的刻凹痕作为天线,将光散布到空闲空间,并且相长干涉会代替镜头聚集光束。
DARPA对电子工业的硅光子扩展与集成感兴趣,并在2011年启动为光电多相集成(E-PHI)项目。该项目的两个重要成果是第一个大规模光学相控阵和第一个广角可操纵光束阵。这些设备证明了商业CMOS生产车间能像几十年来制造电子相控阵一样,生产实用的光学相控阵。电子相控阵已经被用于非机械射电波束控制的雷达应用,并且光学相控阵被看作是小型,低成本的固态Lidar的极佳解决方案。
我们的设备是一块带有可控传输与接收相控阵,及片上锗光电探测器的0.5mm x 6mm硅光子集成电路板。激光本身并不是这些特别的集成电路板的一部分,但是我们及其他团队已经证明了片上激光在未来能被集成到其中。为了操控激光束探测穿过Lidar整个视野的物体,每个天线的相位必须可控。在这个设备的迭代中,热移向器直接通过激光传输加热波导管。硅的折射指数取决于它的温度,决定了穿过它的光的速度与相位的变化量。随着激光穿过波导管,它遭遇了一个刻蚀在硅上的,作为天线的刻凹痕,将光从波导管中散播到空闲空间。每个天线都有它自己的发射图样,在所有发射图样相长干涉的地方,一道聚焦光束就产生了,该过程不需要镜头。
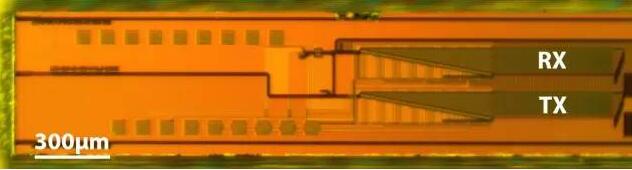
光学显微图象下的MIT固态Lidar,一块带有可控传输与接收相控阵,及片上锗光电探测器的0.5mm x 6mm硅光子集成电路板。
受天线之间间隔的限制,现在光束的操控范围约为51°。减小间隔是一个难题,因为间隔也受到限制,太小的硅波导管没法适当地拘束光束,虽然我们的技术应该能支持将近100°的操控范围。即使受操控范围限制,也可以通过在媒介上放置多个Lidar传感器获得360°的图像。
我们的Lidar探测方法基于相干法,而不是直接测量飞行时间,这样系统就只能对那些由设备传播出的光束做出反应。这减小了太阳光的影响,大大减小了Lidar系统中的噪声系数,使其成为物美价廉的光电探测器而不是昂贵的雪崩光电探测器或很难集成在硅光电平台上的光电倍增管。
现在,我们的片上Lidar系统可以探测到长达两米内的物体,我们希望在一年内能将范围扩大到10米。最小范围差不多是5厘米。我们展示了厘米级的纵向分辨率,并期望在2米的距离有3厘米的横向分辨率。片上Lidar技术的发展路径很清晰,它能达到100米的范围,并有可能更远。
使用其他材料制作集成电路板(比如氮化硅),可能会将输出功率提高2到3个数量级。我们的制造工艺包括加入了硅的氮化硅层,两者系统都可利用。另外,一个更大的相控阵将降低光束的衍射,以增加范围和横向分辨率。这里的难题是所能制造的硅波导管及天线的统一度和精确度,制造工艺很可能在未来因平板印刷术而改善。虽然我们承诺可以为Lidar应用造出范围非常大的相控阵,但以现有的技术,到底能造多大仍然是不明确的,而且这很可能成为未来该技术在范围上的限制因素。
DARPA最近启动了一个后续项目,叫做模块化的光学孔径构建块(MOABB),该项目专注于在即将到来的几年里扩展该硅光电Lidar的工作。虽然MOABB项目不是我们学术研究小组的一部分,但我们计划在E-PHI项目结束后,将我们的相控阵工作扩展至空闲空间交流,以支持多个内部传输速度大于40Gb/s的光子芯片。我们也在利用像Li-Fi和全息摄影这样可以被人眼所见的应用来开发可见光相控阵。
我们相信商业的片上Lidar解决方案将在近几年出现。低成本的、低调的Lidar系统会被广泛应用于无人驾驶汽车和机器人。那时一辆车或一个机器人能安装多个价格低廉的Lidar模块。由于高分辨率、低形状系数和低成本,这些片上Lidar系统甚至能安装在机器人的手指上,使其看到自己抓的是什么。这些技术的发展能改变Lidar系统设备的操作方式,带来许多我们想都没想过的Lidar系统的应用方式,这可能会改变Lidar系统的格局。