智能柔性触觉传感器:器件设计、智能算法及多学科应用的最新进展
2025-10-25 14:49:46 来源:麦姆斯咨询 评论:0 点击:
柔性触觉传感器是一种采用柔性材料制成的新兴电子器件,能够将压力信号转换为电信号,从而实现仿生触觉感知功能。与基于金属、压电晶体或半导体的传统刚性压力传感器相比,柔性触觉传感器具有显著优势,包括可机械变形、对不规则表面的优异贴合性、快速响应动力学特性等。
柔性触觉传感器是一种采用柔性材料制成的新兴电子器件,能够将压力信号转换为电信号,从而实现仿生触觉感知功能。与基于金属、压电晶体或半导体的传统刚性压力传感器相比,柔性触觉传感器具有显著优势,包括可机械变形、对不规则表面的优异贴合性、快速响应动力学特性、高灵敏度以及更高的空间分辨率,因而在触觉感知、健康监测、人机交互、物联网、运动分析、电子皮肤和生物机器人等领域中发挥关键作用。此外,人工智能(AI)算法的融入,进一步赋予了柔性触觉传感器自适应认知能力,这对于推动其智能数据处理、多维分析和应用多样化至关重要。
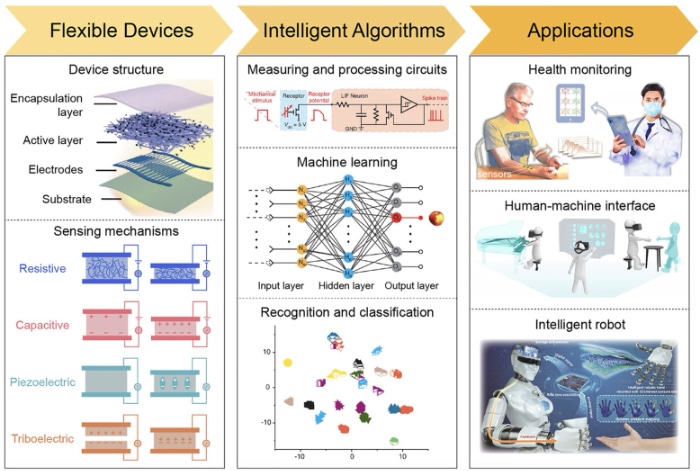
图1 柔性触觉传感系统的示意图
据麦姆斯咨询报道,针对该领域研究,北京航空航天大学潘曹峰教授团队近期在Advanced Intelligent Discovery期刊上发表了题为“Smart Flexible Tactile Sensors: Recent Progress in Device Designs, Intelligent Algorithms, and Multidisciplinary Applications”的综述文章,系统梳理了柔性触觉传感器及压力传感应用相关智能算法的最新进展。
柔性触觉传感技术
(1)柔性触觉传感器的基本构成
柔性触觉传感器主要由柔性基底、敏感层、导电电极和封装层组成。其中,柔性基底提供关键支撑与贴合接触界面,需要具备弹性、拉伸强度和粘附性;敏感层通过其结构变化将机械形变转化为电信号;电极需在机械应力下保持电学稳定性,因此相较于刚性传感器,其材料与结构设计需更具针对性;封装层能提升器件的工作鲁棒性,部分封装层还可赋予传感器自修复等二次功能。

图2 柔性触觉传感器的基板
(2)柔性触觉传感器的传感机制
根据传感机制的不同,柔性触觉传感器可分为电阻式、电容式、压电式和摩擦电式四大类。其中,电阻式与电容式传感器因结构简单、信号输出稳定、信号采集电路设计简便等优势,在当前研究中占主导地位。相比之下,具有自供能特性的压电式与摩擦电式传感器,因其低能耗特性以及在解决分布式传感系统能量收集难题方面的巨大潜力,近年来受到越来越多的研究关注。

图3 柔性触觉传感器的传感机制
(3)柔性触觉传感器的关键参数
柔性触觉传感器的实际性能取决于其核心参数的协同优化。灵敏度作为核心指标,决定了器件检测微弱力的能力,是传感精度的基石;宽线性范围则能确保传感器从轻柔触碰到剧烈按压的不同场景下均能稳定输出信号,解决了高灵敏度与宽检测范围之间的固有矛盾;此外,响应速度、长期稳定性、抗噪声能力等参数虽常被忽视,但对于动态信号捕获、器件耐用性及环境适应性至关重要。

图4 柔性触觉传感器的关键参数
应用于触觉传感器的智能算法
(1)智能算法
当前,人工智能(尤其是机器学习)已成为推动柔性传感系统发展的核心技术,为数据处理、模式识别和智能决策提供了变革性能力。通过直接从数据中学习,机器学习算法无需构建明确的物理或数学模型,因此特别适合处理柔性传感器在动态环境中产生的复杂、多维度信号。
(2)人工智能驱动的传感器性能优化
智能算法为提升触觉传感器性能和实现系统建模开辟了新路径。机器学习和深度学习技术通过数据驱动解读传感器输入-输出关联,推动设计模式从经验式向智能式转变。同时,机器学习的融合,有助于揭示复杂关系中的潜在规律,还能提升数据解耦能力,最终实现传感器性能的优化。
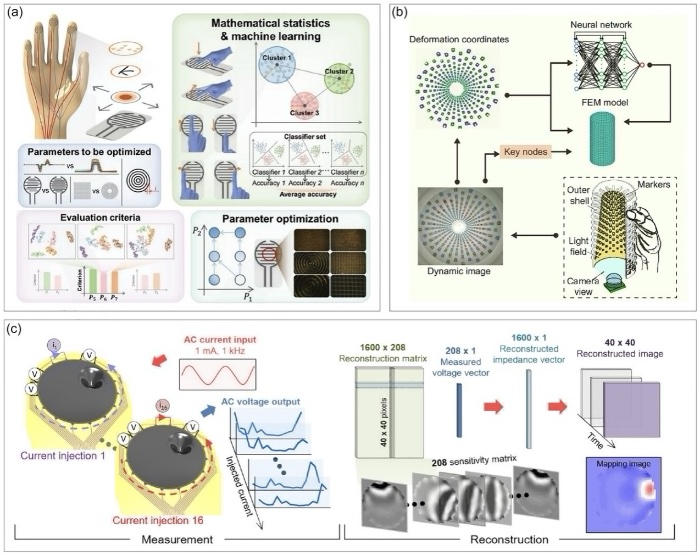
图5 人工智能驱动的传感器性能优化
(3)人工智能驱动的模式识别与感知
在不同外部刺激下,触觉传感器会产生独特的响应信号,这使得人工智能算法能够实现高级模式识别与感知,尤其在姿态分析和物体识别领域表现突出。
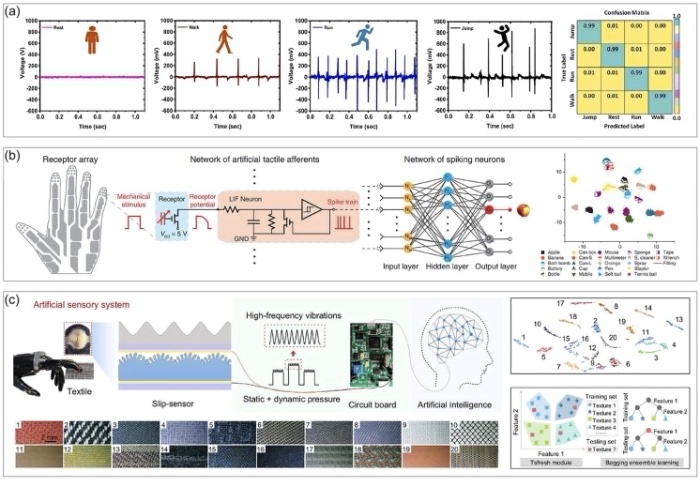
图6 人工智能驱动的模式识别与感知
(4)多模态数据处理与融合
柔性触觉传感中的多模态融合既包括不同转换机制触觉传感器(例如电容式、电阻式)的融合,也涵盖触觉传感器与视觉、温度等异质模态的协同。前者通过多维度触觉信号整合提升测量精度,后者则为机器人、生物力学、医疗诊断等复杂应用提供支持。
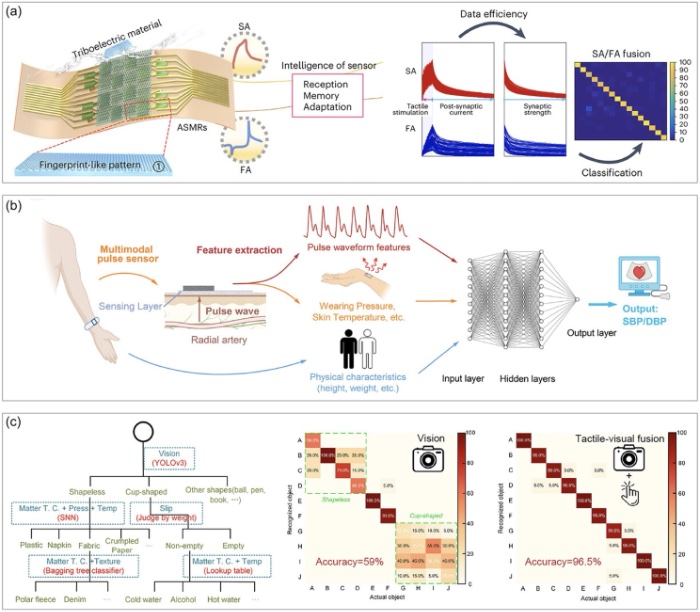
图7 多模态数据处理与融合
(5)传感器-智能处理-执行器闭环系统
柔性触觉传感器与智能算法的融合,不仅能实现感知与分类功能,还能通过闭环控制实现与环境的主动交互。在先进机器人和可穿戴系统中,触觉数据由人工智能驱动的推理引擎(例如强化学习智能体、卷积决策网络)处理,并生成实时执行指令。这些指令可用于调整抓取力、改变假肢刚度或为用户提供触觉反馈,形成闭环系统。这种控制模式对于手术机器人、假肢、自适应外骨骼等对高精度、低延迟响应有严格要求的应用至关重要。
新兴应用
柔性触觉传感器凭借优异的灵敏度、可调控的力学性能和环境适应性,正在革新医疗健康、人机交互(HMI)和机器人领域。在可穿戴健康监测领域,柔性触觉传感器凭借微型化设计、高灵敏度和皮肤贴合性,可实现生理信号实时采集、运动追踪和辅助医疗干预,与机器学习算法结合后还能进一步支持智能诊断与治疗。在人机交互领域,柔性触觉传感系统与智能算法的融合,不仅能提升手势识别和语音交互能力,还为虚拟现实(VR)和增强现实(AR)领域带来了变革性潜力。在智能机器人领域,触觉传感机制与智能算法的融合,赋予机器人多模态操作能力、更强的情境感知能力和自主决策能力,推动机器人智能实现变革性突破。
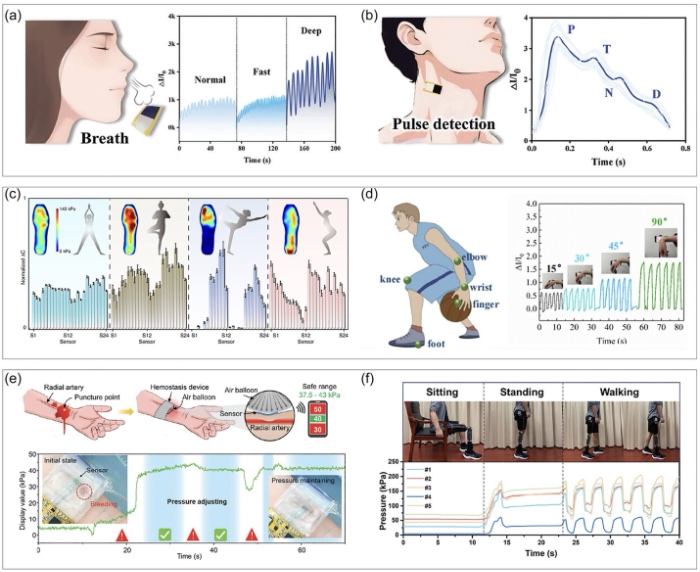
图8 柔性触觉传感器应用于可穿戴健康监测

图9 柔性触觉传感器应用于人机交互
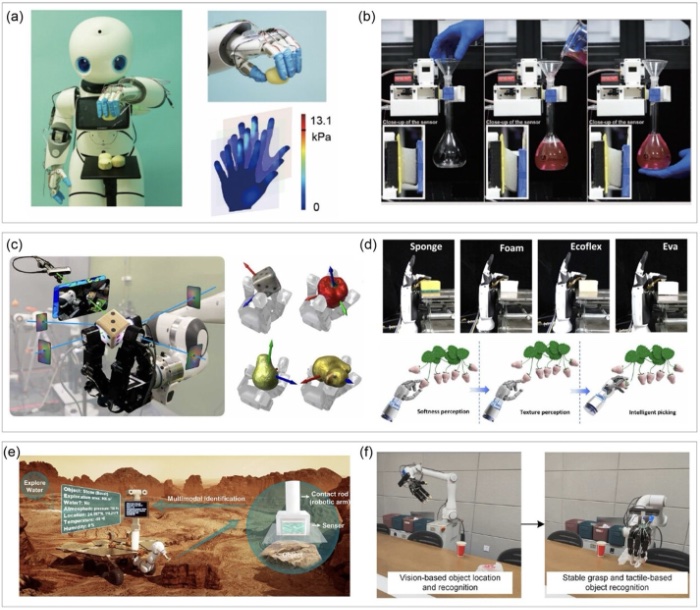
图10 柔性触觉传感器应用于智能机器人
挑战与未来展望
(1)技术局限性
尽管柔性触觉传感器在实验室环境中展现出优异性能,但其在可穿戴系统的实际应用中仍面临严峻挑战,主要是结构不稳定性,以及不同类型传感器的信号特性存在差异,需要优化系统级性能,在传感器设计和信号调理算法方面同步创新,以满足不同应用场景的需求。
此外,当前最先进的智能算法(尤其是深度学习模型)面临着计算复杂性与实时响应性之间的关键权衡。动态手势识别等高精度触觉感知任务,常因神经网络的计算强度而产生延迟,超出了人机无缝交互的容忍阈值。当前研究主要围绕三大策略展开:通过知识蒸馏等模型压缩技术开发轻量级神经网络架构;采用脉冲神经网络等仿生事件驱动范式以减少冗余计算;协同设计专用集成电路,以实现毫秒级延迟、微瓦级功耗的边缘计算。
(2)新兴研究展望
未来,可重点围绕滑动感知传感器、多模态传感器融合、集成系统微型化与成本降低、柔性传感系统混合集成四大方向,开展柔性触觉传感器的前沿研究,推动技术向实用化与高性能化发展。
- 滑动感知传感器:滑动检测是触觉传感的高级阶段,需在单点接触场景下同步测量剪切力与表面滑动状态。当前研究多采用柔性压力传感器阵列,通过接触轨迹分析间接推断滑动行为;在滑动状态识别方面,对摩擦运动产生的周期性变形信号进行频域分析具有明确应用前景,但该方法需以更高的传感器灵敏度与优化的微结构设计为支撑。
- 多模态传感器融合:下一代触觉系统将进一步依赖与视觉、温度、惯性传感器的协同作用,以实现更可靠的环境认知功能。在工业自动化领域,触-视觉混合系统可使机器人抓手在验证空间位置的同时,精准区分材料属性(例如硬纸板箱与塑料容器),有效降低易碎品操作误差。
- 集成系统微型化与成本降低:触觉传感技术的商业化落地,需突破微型化与成本控制两大核心障碍。当前柔性传感器在循环弯曲过程中,普遍存在互连可靠性不足的问题。因此,需开发卷对卷纳米压印等新型制备技术,实现耐用性强、成本低廉的传感器阵列规模化生产。
- 柔性传感系统的混合集成:未来智能触觉平台将深度依赖柔性传感器与刚性计算芯片、无线通信模块、能量收集/存储单元的异质集成。其中,如何解决柔性与刚性组件间的机械失配问题,仍是当前需突破的重大技术挑战。目前已开发出岛桥结构、微剪纸结构、液态金属互连等技术,可有效保障组件的拉伸导电性。此外,卷对卷印刷与激光烧结技术,为高密度、多功能混合电子器件的规模化制备提供了可行路径。这种混合集成模式,将为轻量化、可无感穿戴且具备实时边缘触觉计算能力的可穿戴系统奠定基础。
论文信息:https://doi.org/10.1002/aidi.202500112
延伸阅读:
上一篇:综述:MEMS水听器技术进展
下一篇:基于超构表面的光学超构透镜制造与应用综述