多轴力和力矩传感器:设计原理与机器人力控制应用
2025-08-25 14:57:05 来源:麦姆斯咨询 评论:0 点击:
本文对力和力矩传感器技术进行了全面阐述,深入分析了其传感原理和标定方法。此外,该综述还讨论了力和力矩传感器的集成及与其它传感器的融合应用,例如用于扰动观测器和碰撞检测。
人工智能(AI)的最新进展,尤其是大语言模型和多模态机器人学习的进步,促进了机器人技术的发展。力/力矩(扭矩)传感器是机器人应用中至关重要的组成部分之一,因为它们能够在工作过程中提供力反馈。借助精确的力测量,机器人能够实现精细的操作控制以及与人类的安全交互。
据麦姆斯咨询报道,武汉理工大学机电工程学院徐劲力教授团队在IEEE Sensors Journal期刊上发表了题为“Multiaxis Force/Torque Sensor Technologies: Design Principles and Robotic Force Control Applications: A Review”的综述论文,对力/力矩传感器技术进行了全面阐述,深入分析了其传感原理和标定方法。此外,该综述还讨论了力/力矩传感器的集成及与其它传感器的融合应用,例如用于扰动观测器和碰撞检测。通过概述力/力矩传感器在机器人技术中的一些实际应用,说明了它们在工业自动化、医疗辅助、人形机器人、远程操作和具身智能(Embodied AI)等领域提升机器人功能和交互能力中的关键作用。最后,该综述还探讨了未来传感器的发展方向。
设计原理
图1展示了一种多轴力/力矩传感器。它能够捕获沿x、y、z三个方向的三维(3D)力以及相应的旋转力矩。由于力和力矩无法被直接测量,力/力矩传感器通常采用应变片、电容、光学和磁性等模拟传感元件。这些元件被嵌入传感器内部,用于检测在外部载荷作用下引起的结构几何形变,从而实现对力与力矩的测量。
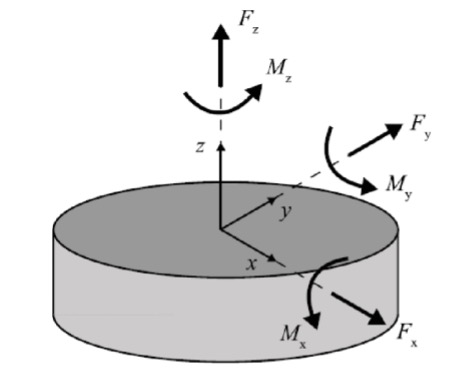
图1 三维六轴力/力矩坐标系
A. 应变片型
应变换能器被安装在传感器内部的可变形梁结构上。应变片的几何形变会导致其电阻发生变化。由于这些信号变化通常非常微小,因此需要采用惠斯通电桥电路来增强信号检测与测量精度。
由于传感器内部存在耦合效应(称为“串扰”),因此换能器被布置在梁的不同侧面以实现解耦。图2展示了结构在不同载荷下的仿真情况。
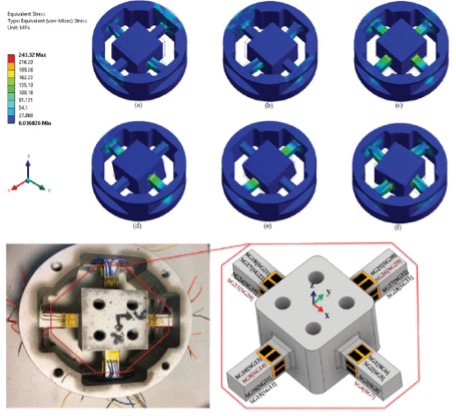
图2 不同载荷下的力/力矩传感器结构的有限元仿真和传感器内部的应变片布置
图2显示,应变片成对布置在最大变形位置,以最大限度地提高沿施加力和力矩轴的灵敏度。凭借其体积小、灵敏度高的特点,它能够方便地集成到机器人关节,并被用于开发微型力/力矩传感器。
然而,应变片对温度变化较为敏感,这会对传感器的精度和可靠性产生不利影响。此外,与其它传感技术相比,它们通常需要更高的功耗。应变片与传感器结构的粘贴工艺也较为复杂且耗时,从而可能增加整体成本。
B. 电容型
电容器由两层平行的电极和夹在其间的介质层组成,如图3所示。当力作用于该传感器时,会压缩或拉伸电容结构,从而改变电极间的距离或重叠面积,进而改变电容值。电容的变化与施加的力成正比。
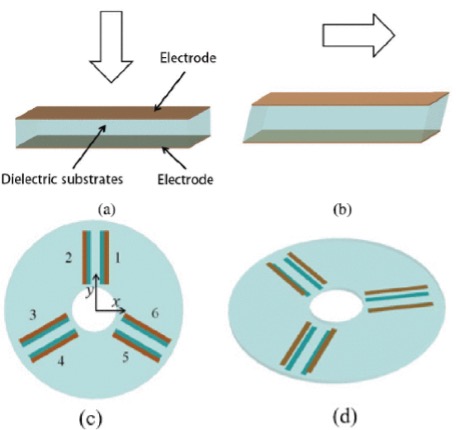
图3 平行板电容器作为力传感器
C. 光学型
基于光学的力/力矩传感器主要分为三类。第一类利用LED与光电二极管(PD)对,通过监测光电二极管模拟信号输出的变化来检测极微小的结构位移。第二类采用LED与相机相结合,利用计算机视觉算法来量化结构位移。第三类为光纤布拉格光栅(FBG)力传感器,其通过检测在受力或受压时光纤中的应变或形变所引起的反射波长偏移来测量力。
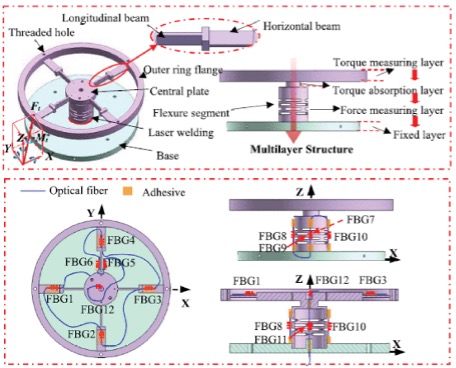
图4 带有FBG传感单元的多层弹性结构
此外,文中还阐述了基于磁性传感技术的力/力矩传感器的设计原理。
其它传感器与力/扭矩传感器融合
将多轴力/力矩传感器的数据与其它类型传感器(例如惯性传感器和位置编码器)集成,可以增强机器人动力学的估计,并使其能够作为扰动观测器使用。具体来说,如图5所示,可通过惯性测量传感器和位置编码器确定机器人末端执行器的惯性力,并从力/力矩传感器的输出中扣除。这一步骤对于将接触力与惯性影响区分开至关重要。
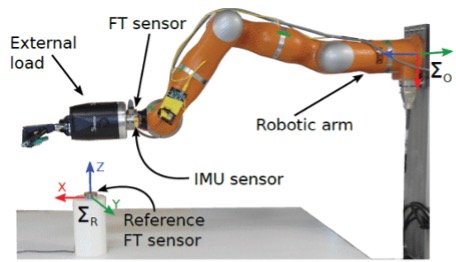
图5 接触力分离测试设置
与力/力矩传感器的设计集成
力/力矩传感器通常安装在机器人机械臂的末端执行器上,从而提升精确力控制、顺应性和安全性。这种配置显著增强了机器人的灵活性,使其在与各种环境交互时能够进行细致操作。这类应用包括材料表面抛光以及复杂操作任务,其中精确的力施加至关重要。
如图6所示,将力/力矩传感器安装在人形机器人足部可增强自平衡功能。同样,将传感器置于指尖能够使机器人手执行更复杂的任务,利用多样化的力信息处理精细的材料和复杂的操作。

图6 带有力/力矩传感器的人形机器人足部结构和集成多轴力/力矩传感器的传感指尖
集成力/力矩传感器的具身智能
具身智能(Embodied AI)在机器人领域正变得日益重要,但在现有机器人系统中,力作为输入模态的应用仍然有限。Chi和Ha等研究人员设计了一种通用操作接口,用于收集人类专家的演示数据,并将这些数据转移到机器人平台进行策略学习,如图7所示。类似地,Zhao等研究人员提出了一个低成本双手远程操作系统,用于收集人类演示数据以进行机器人模仿学习。Wu等研究人员利用3D打印部件和现成机器人构建了一个低成本远程操作框架,以收集高质量的人类演示数据。同样,Xiong等研究人员设计了一个全面的框架,用于在非结构化环境中实现对关节化物体的自适应移动操作。

图7 用于将人类演示转移到机器人视觉运动策略的通用操作接口
小结
综上所述,这篇综述对力/力矩传感器技术进行了全面概述,强调了其在工业自动化与人机交互领域提升机器人应用性能中的重要作用。通过探讨应变片、电容式、相机、光学及磁性等不同类型的传感器,本文强调了支持机器人功能和交互能力的不同设计原理、校准方法和集成技术。
将力/力矩传感器与惯性测量单元(IMU)和编码器等系统集成,可以进一步提高机器人操作的精度与安全性,支持动态交互与碰撞检测等高级功能。从设计角度看,力/力矩传感器可集成于机器人关节、人形机器人的足部与手指结构中;在应用层面,该传感器对于执行表面抛光、钉孔组装以及触觉远程操作等任务至关重要。在具身智能中,力信息对于机器人学习算法至关重要。
未来的研究应解决传感器在成本、尺寸、易受耦合效应及环境因素影响等方面的挑战。潜在的创新方向可能包括传感原理、标定算法及结构设计的进一步突破。在具身智能的发展中,融合力/力矩模态将变得愈发重要。
论文信息:DOI: 10.1109/JSEN.2024.3495507
延伸阅读:
上一篇:综述:纸基柔性电子器件加工、集成和应用
下一篇:最后一页