柔性力传感器技术综述:发展历程、工作原理、创新技术及应用
2025-10-12 15:02:29 来源:麦姆斯咨询 评论:0 点击:
本文概述了仿生微结构、可降解材料、抗弯曲设计以及传感阵列等柔性力传感器技术的最新进展,对不同传感机制进行了详细比较,涵盖性能指标、优势与局限性。该综述还重点介绍了柔性力传感器的关键创新,并讨论了当前面临的挑战和未来的发展方向。
随着智能材料、仿生学和机器人技术的进步,能够检测法向力和多轴力的柔性力传感器在健康监测、假肢以及机器人操控等应用中越来越受到关注。这些力传感器采用电阻式、磁式和光学式传感等多种机制,并需在高时空分辨率、可拉伸性以及抗电磁与热干扰能力之间取得平衡。
据麦姆斯咨询报道,近期,北京科技大学郝雨飞副教授、张建华教授团队在Surfaces and Interfaces期刊上发表了题为“Flexible sensors for force detection: A review”的综述论文,概述了仿生微结构、可降解材料、抗弯曲设计以及传感阵列等柔性力传感器技术的最新进展,对不同传感机制进行了详细比较,涵盖性能指标、优势与局限性。该综述还重点介绍了柔性力传感器的关键创新,并讨论了当前面临的挑战和未来的发展方向。
柔性力传感器能够在弯曲、拉伸、扭转等多种变形条件下感知和测量外部作用力,例如压力、剪切力和拉伸力。与传统的刚性力传感器相比,柔性力传感器具有轻质、薄型、可拉伸及适应性强等优势。这些特性使其能够无缝贴合复杂的曲面结构,在可穿戴设备、机器人触觉感知、医疗康复、电子皮肤以及智能交互系统等应用中发挥不可或缺的作用。
力传感器的发展历程可追溯至20世纪早期,这是测量技术取得重要进展的关键里程碑。随着机械、电子和材料技术的不断进步,力传感器已从纯机械和电学设计逐渐演变为微型化、柔性化和智能化的系统。如图1所示,该图展示了力传感器的发展历程。
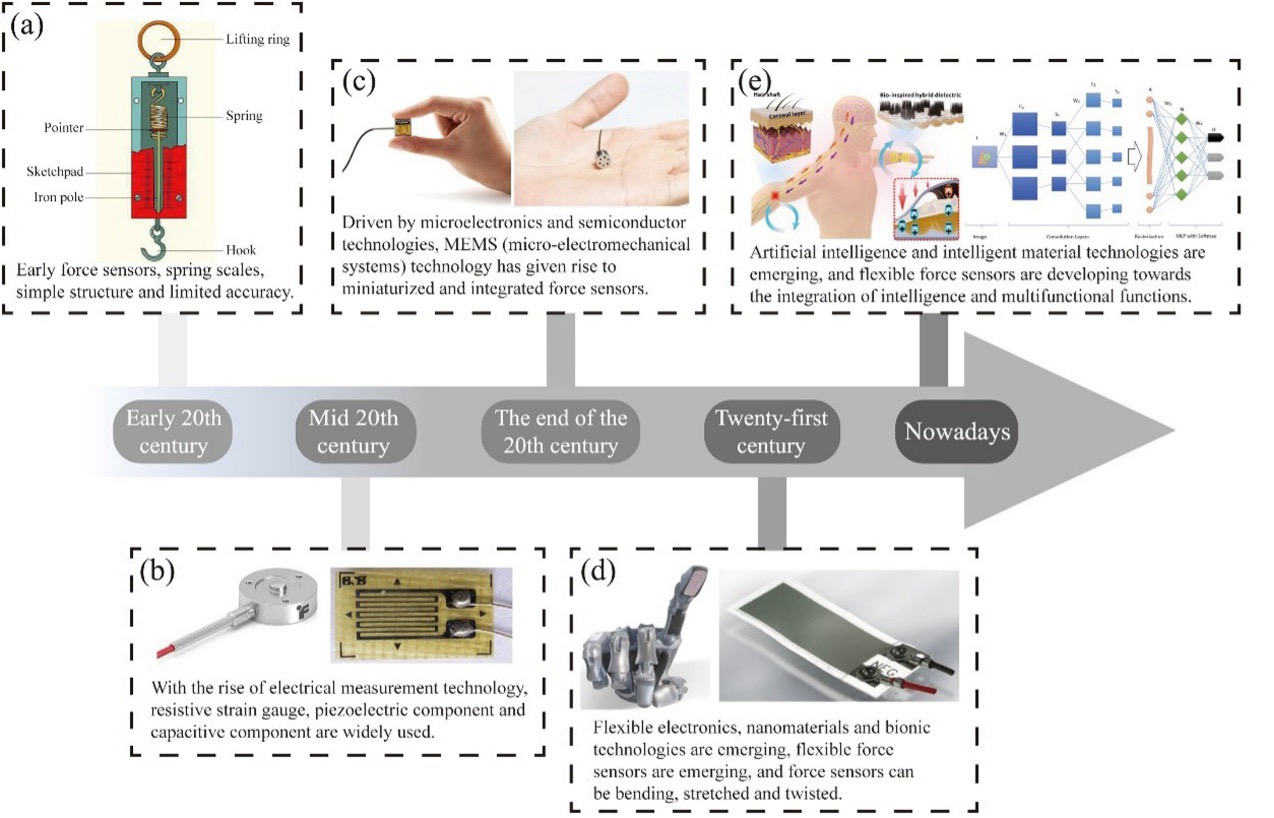
图1 力传感器的变革历史:(a)20世纪初(b)20世纪中期(c)20世纪末(d)21世纪(e)当今
目前,力传感器正朝着智能化和多功能集成方向发展,通过融合人工智能(AI)、无线通信和云计算技术,实现智能数据处理与远程监测。此外,力传感器正在与温度、湿度和应变等多个物理参数的检测相结合,从而进一步拓宽它们在工业自动化、航空航天、医疗器械和仿生电子领域的应用潜力。
柔性力传感器工作原理及传感技术
柔性力传感器的工作原理多种多样,包括电阻式、电容式、磁式、光学式以及摩擦电式传感机制。其中,基于电阻和电容原理的柔性力传感器因其相对简单的结构设计和兼容的读出电子设备而受到了更多的研究关注。相比之下,利用磁性和光纤原理的传感器对相关硬件提出了更高的要求,其结构设计和制造过程往往更复杂。
电阻式柔性力传感器
电阻式柔性力传感器是一种通过监测电阻变化来检测外力的传感器。它通常由柔性材料与电阻敏感元件组合而成。该传感器能够测量柔性结构上的形变或施加力,并根据电阻值的变化产生相应的传感信号。
电阻式柔性力传感器的结构通常由导电敏感层、梳状电极以及上下层的非导电封装材料(例如PDMS)构成。通常,此类传感器仅限于检测单向法向力。在这种结构中,导电敏感层的设计尤为关键,因为它决定了传感器的整体灵敏度、稳定性和机械适应性。常见的导电敏感层设计方法包括弯曲和起皱结构、互锁式微结构(图2c)、仿生微结构、泡沫状结构、微柱阵列结构(2b)以及金字塔阵列结构(图2a)等。
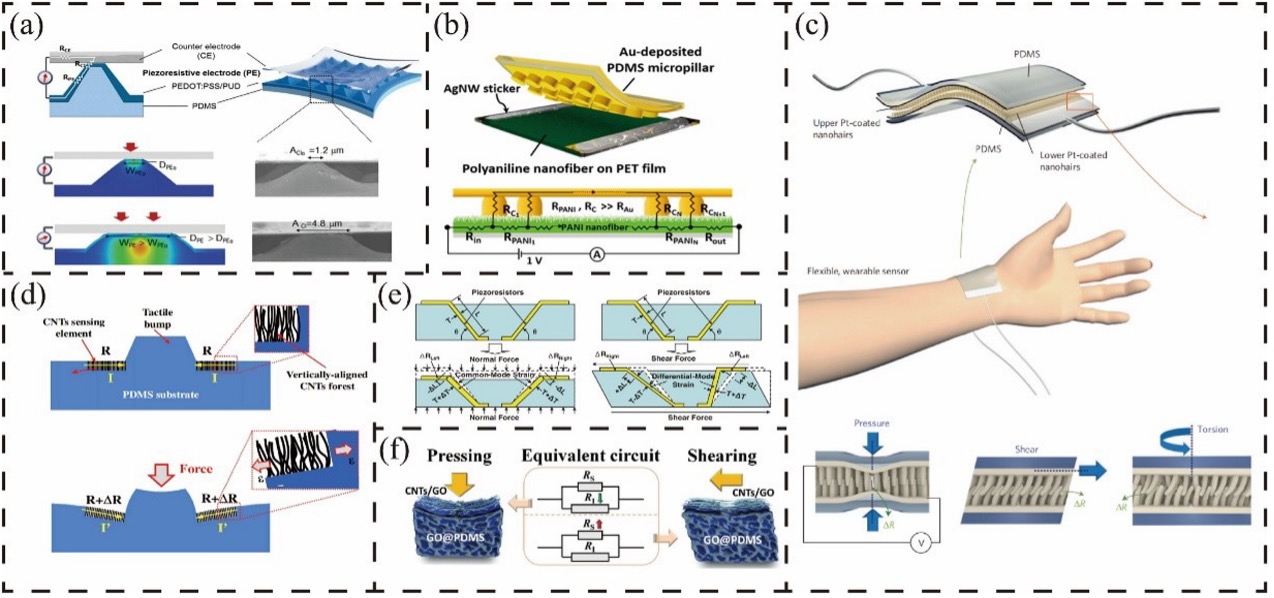
图2 电阻式柔性力传感器示例
电容式柔性力传感器
电容式柔性力传感器是一类通过测量电容变化来检测力信号的传感器。这类传感器通常采用平行板结构,通过测量上下板之间的电容来确定力信号。将导电材料嵌入柔性衬底中,可以设计出多种结构,从而能够检测外部作用的法向力和剪切力信号。
电容式柔性力传感器的结构较为简单,通常涉及在柔性衬底材料中嵌入微电容器。微电容器由电极层和介电层组成。介电层通常位于上下电极之间或包覆电极材料,在电容式柔性力传感器中起关键作用,其材料选择和微结构设计直接决定了整个传感器的测量范围、灵敏度等核心性能参数。

图3 电容式柔性力传感器示例
柔性磁式力传感器
柔性磁式力传感器的工作原理依赖于各种磁敏效应,这些效应能够将磁场的变化转换为电信号,再通过信号处理将其转化为力的读数。柔性磁式力传感器的主要工作机制包括霍尔效应(图4a)、巨磁阻效应(图4b)、隧穿磁阻效应(图4c)以及各向异性磁阻效应(图4d)。通常,它们的结构由柔软衬底材料与磁性材料组成,通过监测磁场的变化来检测并反映柔性结构的状态。
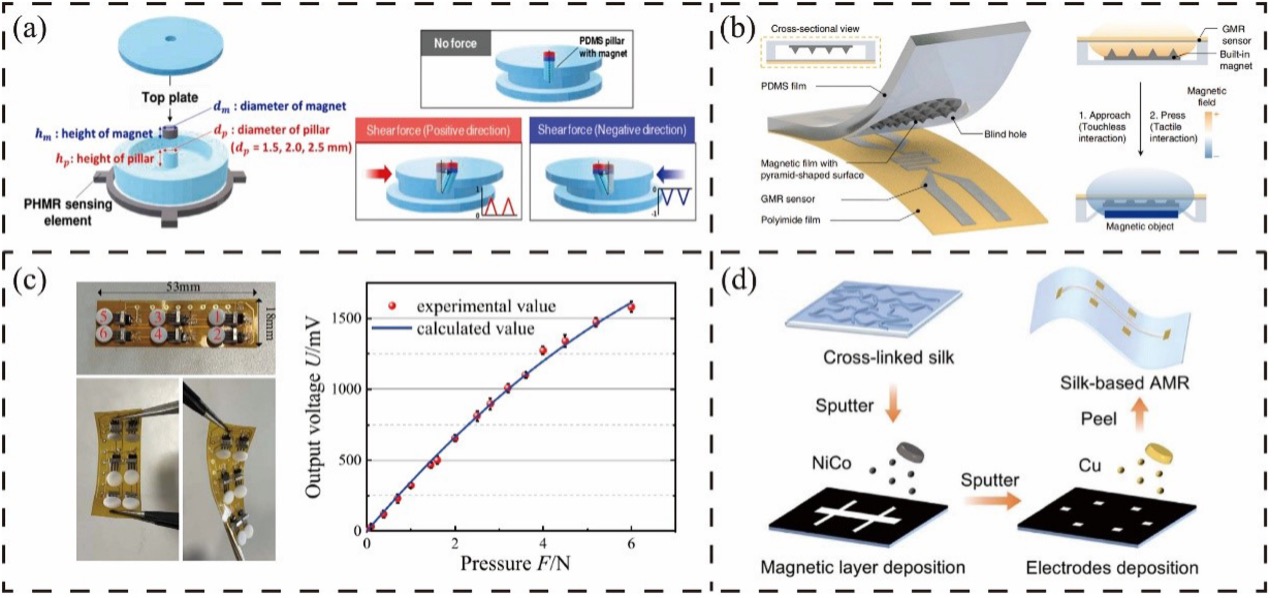
图4 柔性磁式力传感器示例
柔性光学式力传感器
柔性光学式力传感器旨在通过检测光信号的变化来测量外部作用力,包括压力、剪切力和拉伸力。其基本工作原理主要涉及光学现象,例如强度调制、干涉效应、波长偏移、散射变化或谐振效应。根据光学测量原理,这些传感器可分为光纤布拉格光栅型、基于强度调制型以及基于干涉型等类型。大多数现代柔性光学式力传感器的总体架构通常包括光纤、光源与探测器以及柔性衬底。
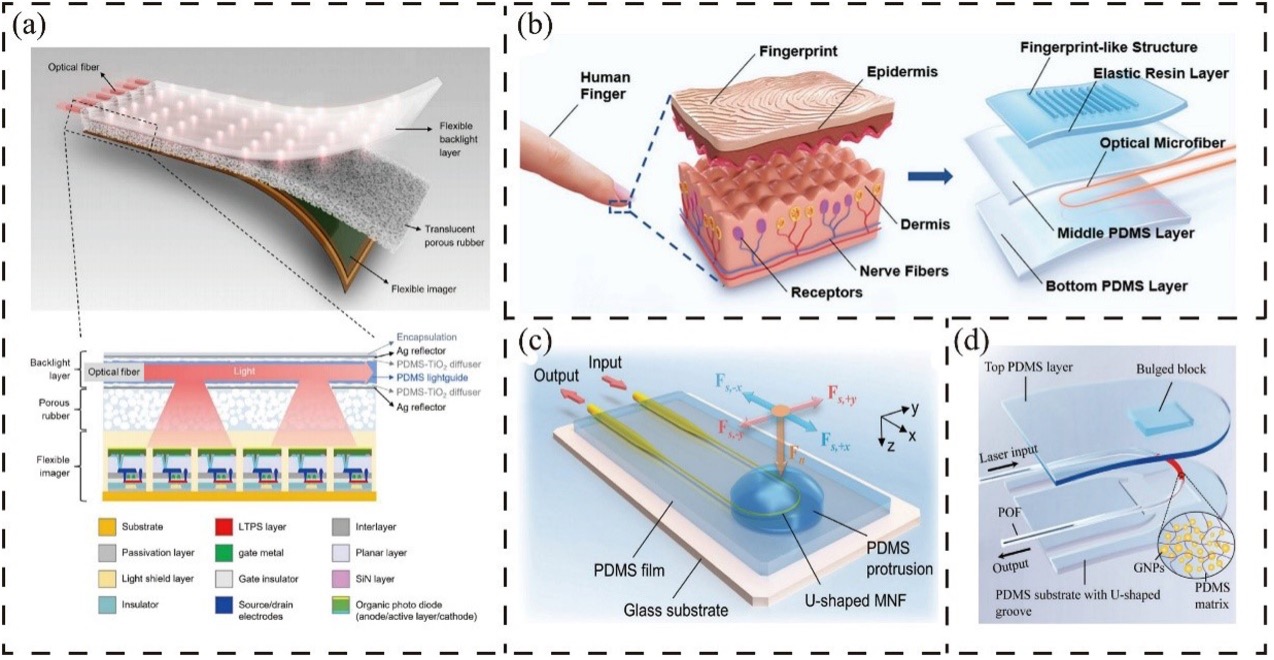
图5 柔性光学式力传感器示例
柔性力传感器的应用
柔性力传感器已被广泛应用于可穿戴健康监测、机器人操控、智能假肢、人机交互、工业自动化以及生物医用植入物等多个领域。其中,可穿戴监测和机器人操控尤为具有代表性,并展现出快速发展的态势。因此,该综述重点探讨了这两类应用场景,提供深入分析和典型案例,以突出其重要性和发展趋势。
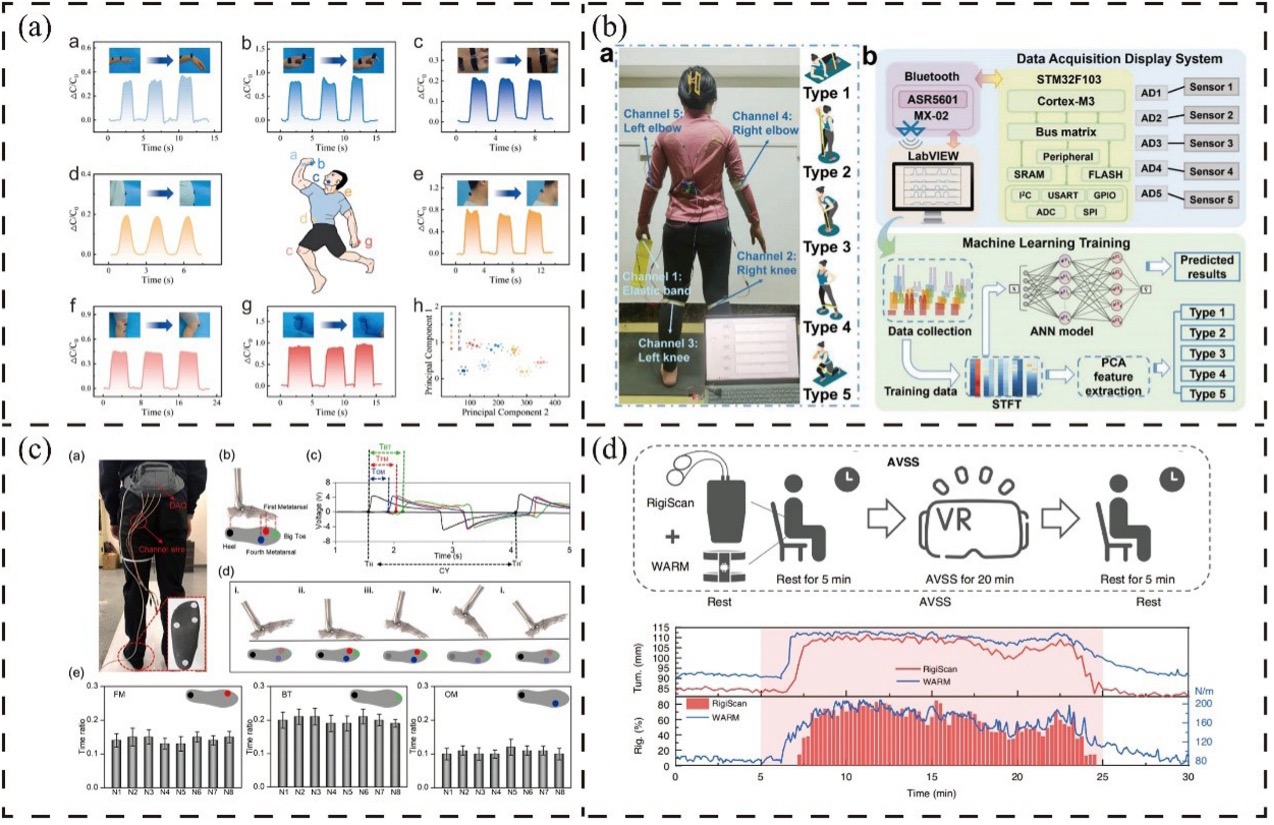
图6 柔性力传感器在健康监测中的应用

图7 柔性力传感器在机器人操控中的应用
小结
综上所述,柔性力传感器在可穿戴电子设备、人机交互、机器人以及生物医学监测等多个领域展现出巨大潜力。本综述根据传感机制(包括电阻式、电容式、磁式、光学式、摩擦电式以及混合式)对这些传感器进行分类,阐述了其工作原理、设计改进及关键应用。尽管在灵敏度、响应速度、柔性及集成性方面的性能已有所提升,但在信号稳定性、规模化制造以及特定应用适配性方面仍面临挑战。性能与制造复杂性之间的权衡也限制了其在实际中的应用。未来研究应聚焦于开发具备多功能、自供能和生物相容性且具有长期可靠性的传感器。将柔性传感器与人工智能、边缘计算和无线通信等技术相融合,对下一代智能传感系统至关重要。该综述提供了清晰的技术概览,并为后续研究与开发提供了参考。
论文链接:https://doi.org/10.1016/j.surfin.2025.107361
延伸阅读: