基于离电与压电的双模柔性压力传感器,助力机器人指尖触觉感知
2025-09-06 10:32:42 来源:麦姆斯咨询 评论:0 点击:
这种基于离电与压电耦合机制的双模柔性压力传感器,能够实现静态与动态压力的全域响应检测。该传感器可贴附在机器人指尖,用于感知机械手与物体接触时的静态与动态压力变化情况。
近年来,柔性压力传感器不断发展,已广泛应用于电子皮肤、健康监测、人机交互和软体机器人等前沿领域。柔性压力传感器具有超低模量、高机械延展性及优异的界面贴合性,能够在复杂形变条件下实现稳定的信号输出,逐渐成为可穿戴智能设备中的核心功能模块之一。然而,由于传感材料自身特性的限制,要实现兼具静态与动态响应能力的柔性压力传感器仍面临诸多挑战。因此,开发具有高响应速度、宽带宽工作能力及环境适应性的柔性压力传感器,对于提升力感知的精确性与实用性具有重要意义。
据麦姆斯咨询报道,针对上述挑战,厦门大学、湖北工业大学、上海交通大学等机构的研究团队联合提出一种基于离电与压电耦合机制的双模柔性压力传感器,能够实现静态与动态压力的全域响应检测。该传感器可贴附在机器人指尖,用于感知机械手与物体接触时的静态与动态压力变化情况。相关研究成果以“Dual-Mode Flexible Pressure Sensor Based on Ionic Electronic and Piezoelectric Coupling Mechanism Enables Dynamic and Static Full-Domain Stress Response”为题发表在Micromachines期刊上。
这项研究提出的柔性压力传感器采用复合传感结构,通过丝网印刷工艺将含多壁碳纳米管(MWCNT)的离子溶液涂覆于上下柔性电极表面,中间夹持经极化处理的聚偏氟乙烯(PVDF)薄膜。该压力传感器呈“三明治”层状结构,自上而下依次为:离子层、PVDF薄膜、柔性印刷电路基板(FPC薄膜)。离子层可增强界面电荷效应,从而提升信号输出灵敏度;PVDF薄膜作为压电感敏层,负责对外部施加的压力信号进行响应;FPC层兼具电极与支撑基板的功能,可实现器件的信号提取与柔性贴附。
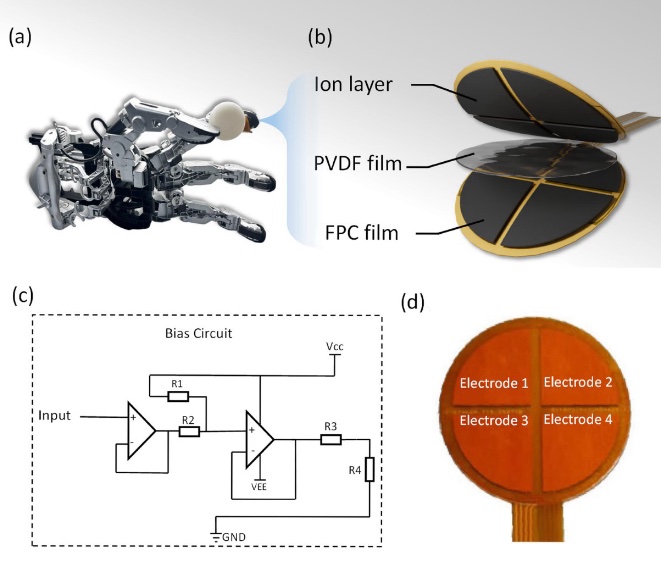
图1 双模柔性压力传感器示意图及物理演示
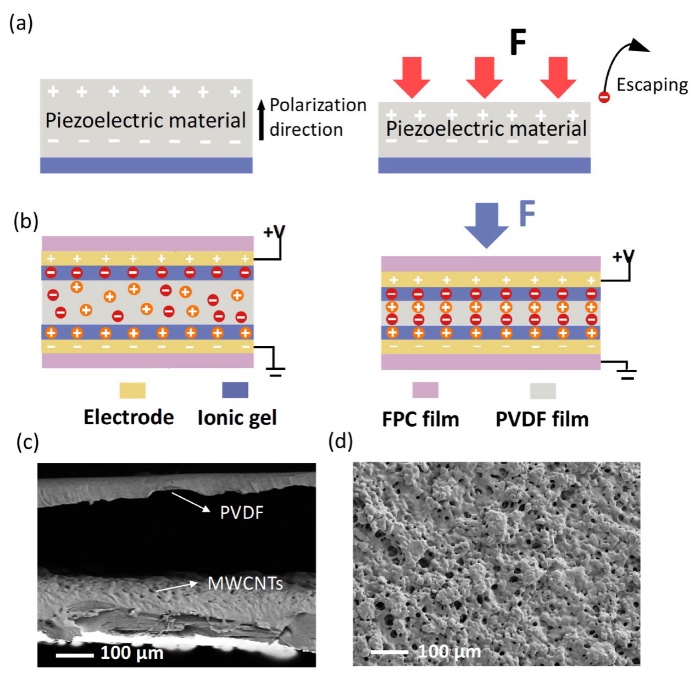
图2 柔性压力传感器的力学示意图与微观结构表征
研究人员通过优化MWCNT(质量分别为0.25 g、0.5 g、0.75 g)与离子液体(体积分别为2 mL、3 mL、4 mL)的组成比例,发现当MWCNT质量为0.5 g、离子液体体积为3 mL时,该柔性压力传感器表现出最优性能,最大灵敏度达0.13 kPa⁻¹。该灵敏度水平优于或相当于目前已报道的众多柔性压力传感器(灵敏度通常在0.01 ~ 0.11 kPa⁻¹范围内),凸显了本设计的性能优势。在0 ~ 150 kPa压力范围内,该传感器表现出优异的线性度(R²=0.9981),且经过2000次加载-卸载循环后仍能保持稳定性能。此外,离电与压电机制的协同耦合,使该传感器在静态与动态压力条件下均具有快速响应与高稳定性。通过不同球体冲击角度及恒定压力下的测试证实,该传感器能够保持快速且稳定的响应。
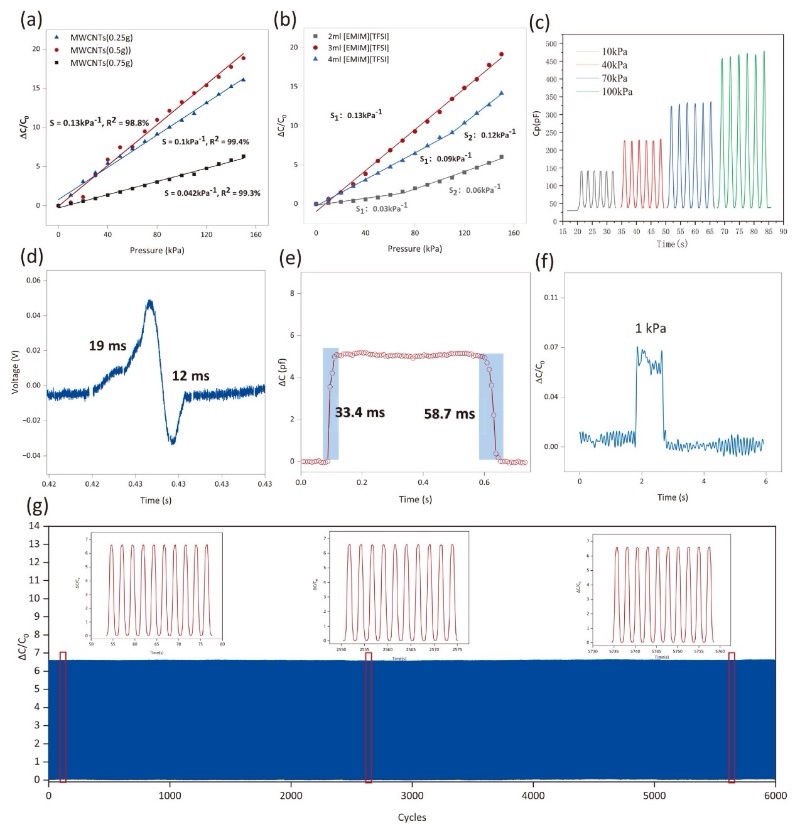
图3 柔性压力传感器在不同条件下的性能特征
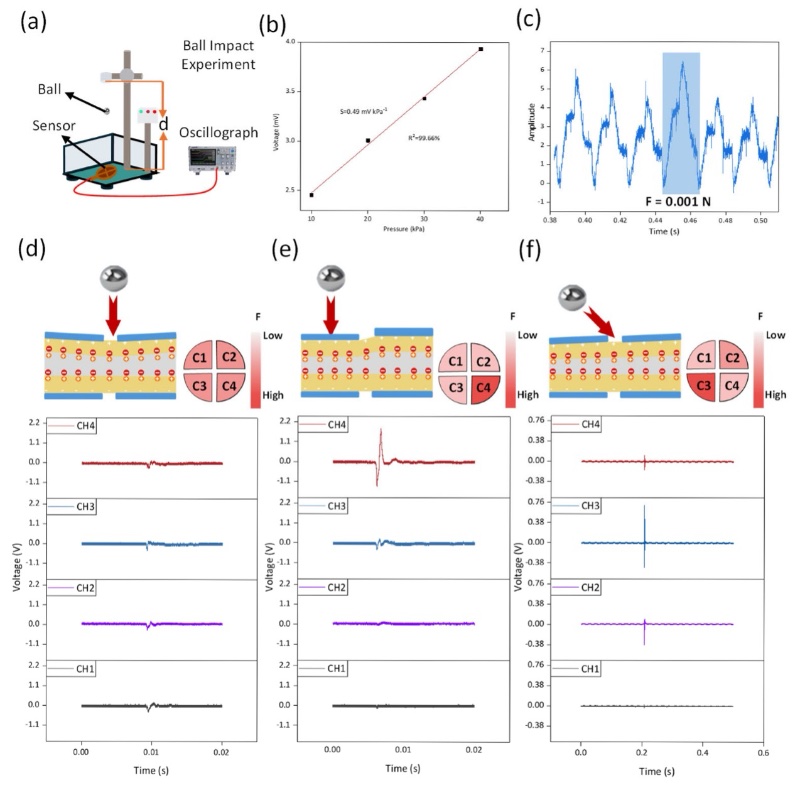
图4 不同撞击角度下的球体撞击实验及传感器响应结果
这项研究创新性地将离电效应与压电效应集成在单一柔性压力传感器中,展示了其在静态与动态压力可靠检测方面的应用潜力。这种双模传感机制对于传感器的结构优化及性能提升具有重要意义。
论文信息:https://doi.org/10.3390/mi16091018
延伸阅读:
上一篇:东南大学研发新型六维力/力矩传感器,集成全向过载保护结构
下一篇:之江实验室在电子皮肤领域取得进展,实现应变不敏感且高分辨率触觉感知