新型纤维基柔性压力传感器,助力实现高精度触觉传感功能
2025-08-30 15:46:39 来源:麦姆斯咨询 评论:0 点击:
研究人员开发了一种独特的多壁纤维,其具备在压力下调控电阻率的特殊机制,成功解决了纤维基柔性压力传感器领域的一个基础性问题。
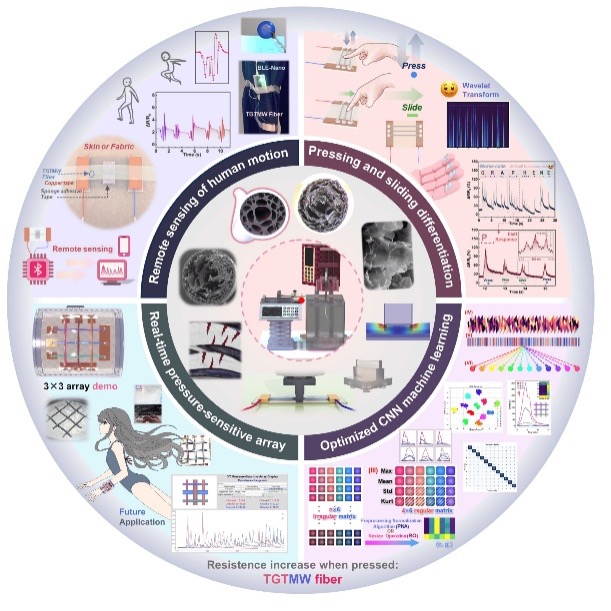
这种名为“TGTMW”的纤维在受到外界压力时展现出独特的电阻增大特性,这一新型纤维因此成为柔性压力传感器的理想候选材料,可广泛应用于手势控制、机器人抓手、智能纺织品及医疗健康等多个领域。
压力传感器在众多新兴应用领域发挥着至关重要的作用,但传统的设计往往存在体积庞大或柔韧性差的缺点。据麦姆斯咨询报道,近期,日本研究人员通过创新的设计开发出一种纤维基柔性压力传感器以解决这些缺点。得益于由石墨烯纳米片构成的独特多壁导电芯层,这种纤维有望助力下一代手势控制系统、机器人抓手等实现高精度触觉传感功能。
TGTMW纤维基柔性压力传感器及其应用
从需要精准触觉反馈的机器人抓手,到监测人体运动的可穿戴设备,不同应用领域对压力传感器的需求正稳步增长。在理想情况下,若要有效集成到假肢、智能纺织品或机器人中,压力传感器需具备柔韧性好、灵敏度高、耐久性强的特点。然而,传统的薄膜基和气凝胶基传感器往往存在体积过大、刚性过大等问题,这限制了它们在诸多领域的应用。
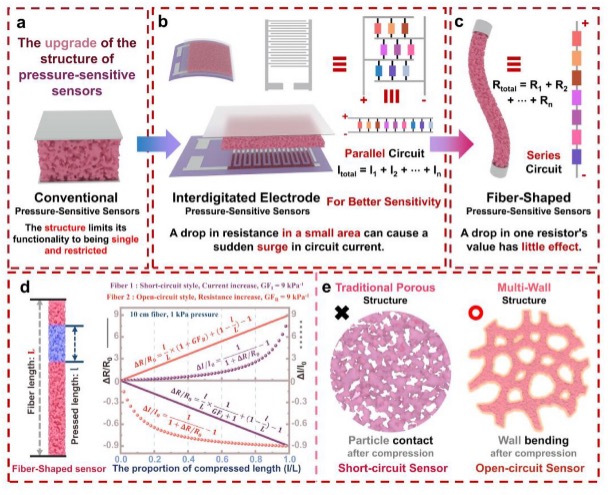
结构对电阻式压力传感器功能与设计的影响
上述局限促使了人们对纤维基柔性压力传感器的研究——纤维基柔性压力传感器有望实现微型化,并且具备更强大的多功能性。目前仍存在的一个主要挑战是,如何针对纤维的串联电路结构,设计出可高效工作的传感机制。
在导电纤维中,受压时局部电阻减小是大多数传感器的常见响应,但这种变化对纤维整体导电性的影响较小。因此,要实现真正有效的压力传感功能,纤维基柔性传感器需展现出相反的特性:受压时整体电阻显著增大。
目前,日本信州大学(Shinshu University)研究人员通过创新的纤维设计方案攻克了这一难题。相关研究成果以“Fibrous Pressure Sensor with Unique Resistance Increase under Partial Compression: Coaxial Wet-Spun TiO2/Graphene/Thermoplastic Polyurethane Multi-Wall Multifunctional Fiber”为题,发表于《先进材料》(Advanced Materials)期刊。研究人员开发了一种独特的多壁纤维,其具备在压力下调控电阻率的特殊机制,成功解决了纤维基柔性压力传感器领域的一个基础性问题。
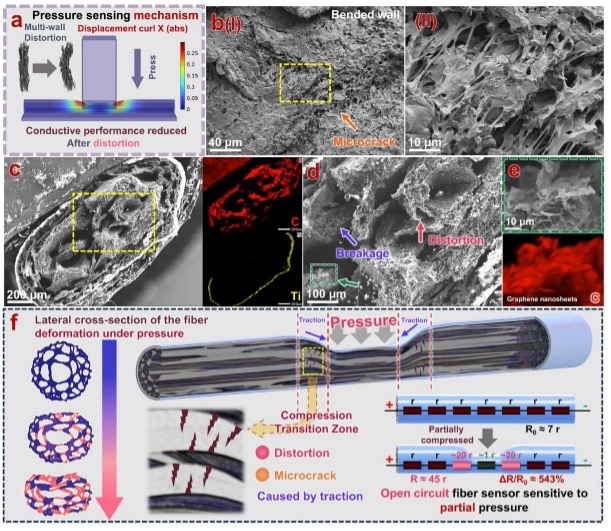
TGTMW多壁纤维的压力传感机理分析
这种新型纤维通过同轴湿纺工艺制备而成,其结构包含:由热塑性聚氨酯(TPU)和二氧化钛(TiO₂)构成的光滑外壳,以及含有二维石墨烯纳米片(GNPs)的芯层。研究团队利用这些扁平石墨烯纳米片的范德华相互作用和自堆叠特性,使纤维芯层形成了对其功能至关重要的多壁结构。基于此,该研究人员将其命名为TGTMW纤维(即TiO₂/石墨烯/热塑性聚氨酯多壁纤维)。
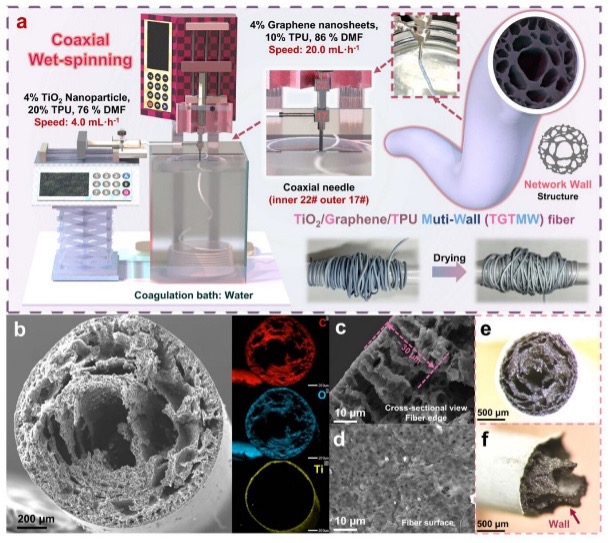
TGTMW多壁纤维的制备及表征
通过大量的结构分析与实验验证,研究人员发现:当TGTMW纤维的局部区域受到压缩时,其内部多壁结构会发生弯曲并产生微裂纹。这些微裂纹会破坏轴向排列的石墨烯纳米片的导电路径,进而导致纤维电阻急剧增大。该机制使得TGTMW纤维即便仅局部小段受到压缩,也能产生高响应信号。具体而言,采用TGTMW纤维的压力传感器灵敏度极高,即便在仅0.1牛的最小压力下,也能检测到轻微的指尖触碰。
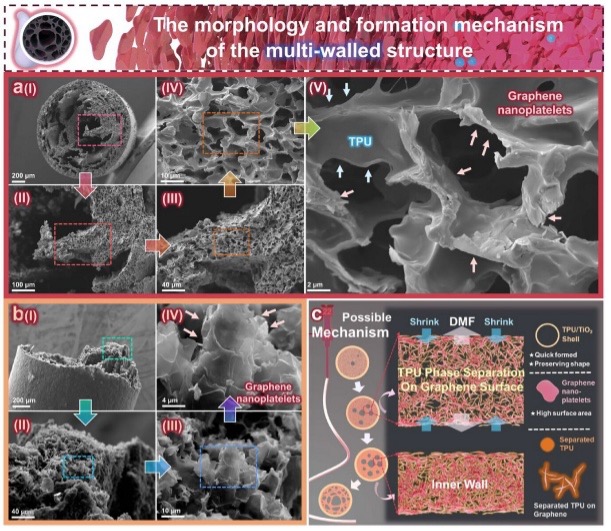
TGTMW纤维的多壁结构表征及形成机理分析
值得注意的是,TGTMW纤维的高长径比特性,使其成为需要精细化触觉反馈应用场景的理想选择。例如,在软体机器人领域,这类纤维可集成到用于养老照护或医疗辅助的机器人抓手指尖中。
论文作者Chunhong Zhu指出:“目前用于机器人手部的触觉传感器大多为刚性材质,当其与人接触时,可能会引发人体的不适甚至给人体造成伤害。与之相反,纤维基柔性压力传感器兼具舒适性与柔顺性,能有效降低伤害风险。”
此外,TGTMW纤维还具备区分触觉事件类型的能力。研究人员通过实验证实,对三纤维阵列采集的数据进行小波变换处理后,可精准辨别按压、滑动等不同的触觉动作形式。
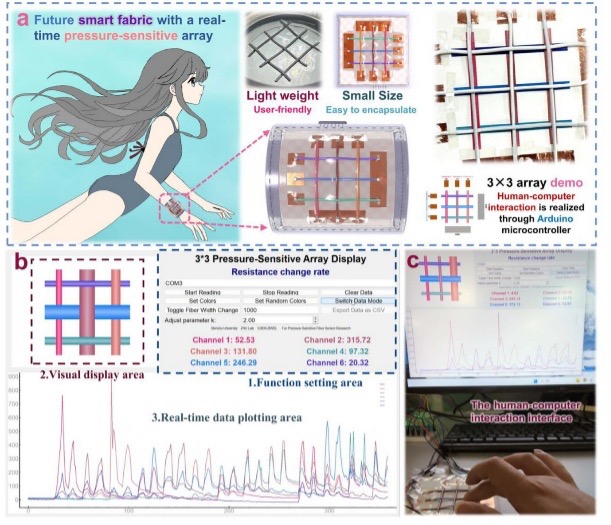
基于TGTMW纤维的实时压敏阵列应用演示
Chunhong Zhu强调:“这种能力在摩擦状态的触觉感知中具有极高价值,它能让机器人系统像人类指尖一样,区分静摩擦与动摩擦。这一特性有望使机器人的操作达到与人类相当的精细度和灵巧度。”
TGTMW纤维的可规模化制备特性,也为智能纺织品与交互界面的创新设计开辟了新路径。例如,可将手势检测系统嵌入专用服装,使其在难以应用触摸屏的复杂环境(如水下、太空)中实现人机交互。
展望未来,研究人员认为这项成果标志着触觉传感器领域的基础性变革。Chunhong Zhu总结道:“大胆地说,我们的研究可视为一个新的子领域开端——不仅提出了独特的纤维基柔性压力传感器架构,还开发出性能稳定的工作原型。我们所设计的TGTMW纤维,凭借其创新性设计、独特结构及多元应用场景,在推动柔性压力传感器与下一代智能设备发展方面具有巨大潜力。”
论文链接:https://doi.org/10.1002/adma.202509631
延伸阅读:
上一篇:超高精度力传感技术:基于光镊的超分辨光子力显微镜
下一篇:东南大学研发新型六维力/力矩传感器,集成全向过载保护结构