华中科大研发柔性磁传感器阵列,测量3D肌肉形变以识别人体运动
2026-06-20 08:23:35 来源:麦姆斯咨询 评论:0 点击:
华中科技大学近期开发了一种封装于柔软疏水有机硅材料中的柔性磁传感器阵列(SMSA),用于测量3D肌肉形变特征,以实现人体运动识别。
精准的人体运动识别对于人机交互(HMI)系统控制至关重要,例如可穿戴设备和虚拟/增强现实系统(AR/VR),其中,捕捉人体运动特征的可穿戴传感器是运动识别的关键基础。肢体关节的运动由肌肉驱动,肌肉的运动先于肢体关节的运动,因此,监测肌肉运动能实现更快的人机交互系统响应。
目前已开发出多种用于肌肉形变测量的柔性压力或应变传感器,主要包括电阻型和电容型两大类,但由于水的导电性,这些传感器仍面临严重的信号干扰问题。另一方面,肌肉形变具有三个维度(一个法向和两个切向),但现有多数传感器仅能捕捉其单维度信息(法向)。因此,研发一种能够捕捉3D肌肉形变的可穿戴设备,以适配水陆两栖应用场景具有重要意义。
近些年,软磁机器人领域取得了重大进展,能够通过电磁场对弹性体形变进行精确驱动。由此引出了一个有趣且极具吸引力的概念:将3D肌肉形变与3D空间中的三轴磁场相关联。由此,磁场也可解耦以实现3D运动捕捉。此外,磁传感器对水不敏感,确保了其在陆地和水中均能输出稳定信号,即便在两栖环境切换时也无需重新校准,为肌肉形变测量提供了一种通用方法。
据麦姆斯咨询报道,华中科技大学近期开发了一种封装于柔软疏水有机硅材料中的柔性磁传感器阵列(SMSA),用于测量3D肌肉形变特征,以实现人体运动识别。实验证明,该柔性磁传感器阵列有效实现了3D肌肉形变的捕捉,并且对两栖环境具备优异的适应性,有望为机器人控制、康复监测及运动科学领域的肌肉监测提供助力。相关研究成果已经以“Soft Magnetic Sensor Array for Amphibious Measurement of 3D Muscle Deformation Distribution for Human Motion Recognition”为题发表于Advanced Intelligent Systems期刊。
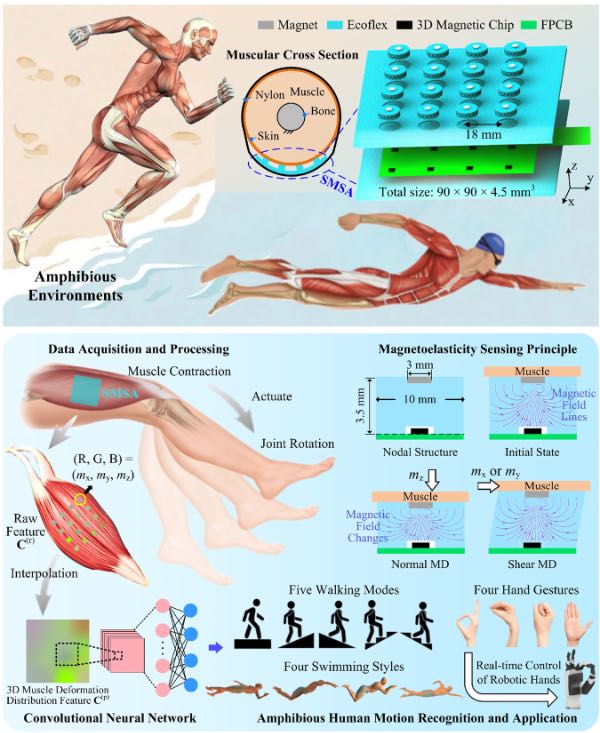
图1 基于柔性磁传感器阵列的水陆两栖人体运动识别与应用示意图
柔性磁传感器阵列的设计、结构与制备
为捕捉3D肌肉形变分布,柔性磁传感器阵列的输出维度从一维提升至三维,节点数量也增加到了16个(4 × 4)。SMSA的制备流程如图2所示。为稳定检测肌肉形变信号,传感器Ecoflex层采用了牺牲糖颗粒法制备的多孔结构,相较于实心结构,其弹性模量更低,力传感灵敏度更高。此外,多孔设计可使水进入弹性体,能够抵消深水应用中的外部水压干扰。
该研究采用钕铁硼N52磁体在芯片周围产生磁场,其高磁能积使其适用于小形变、高精度的测量场景。为满足水下应用需求,研究人员制备了柔性Ecoflex基底以对采集电路进行防水处理。传感器节点和电路均采用柔性设计,确保柔性磁传感器阵列可贴合各类肌肉,实现舒适且可靠的人机交互系统。
柔性磁传感器阵列采用单片集成3D AMR磁传感器MMC5603NJ(产品源自:美新半导体)。整个系统的采样频率为100 Hz,可捕捉所有人体活动。
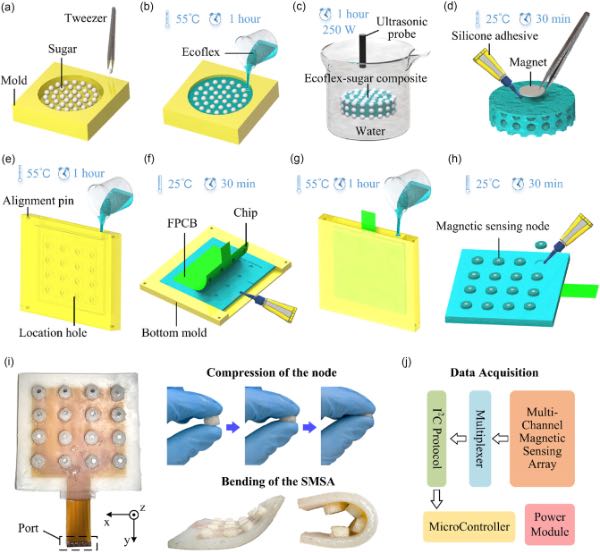
图2 柔性磁传感器阵列的制备工艺
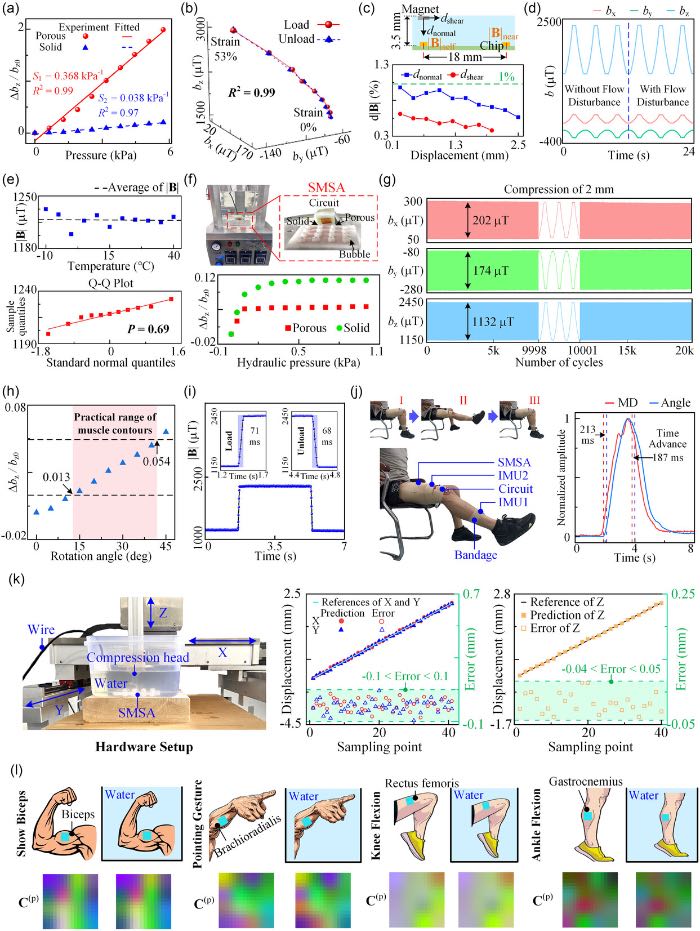
图3 柔性磁传感器阵列的性能表征
两栖运动步态监测
针对行走和游泳两种典型运动步态,研究人员进行了模式分类和连续相位估计,以验证所提出的基于柔性磁传感器阵列的运动检测方法。为收集模型训练和预测所需的数据,该研究招募了15名受试者开展运动实验。
鉴于腓肠肌和股直肌与步态运动的两大肢体(小腿和大腿)密切相关,该研究将其选为检测目标。
为凸显柔性磁传感器阵列在人体运动识别方面相较于其他现有传感器技术的优势,研究人员选用了目前广泛应用的两种商用传感器——MEMS惯性测量单元(IMU)和柔性电阻式应变片传感器(FRSA)作为对比,并将上述三种传感器采集的数据输入至同一模型,以保证对比的公平性。为避免肢体不对称性的影响,该研究测量了双腿的运动数据,并对结果取平均值进行分析。
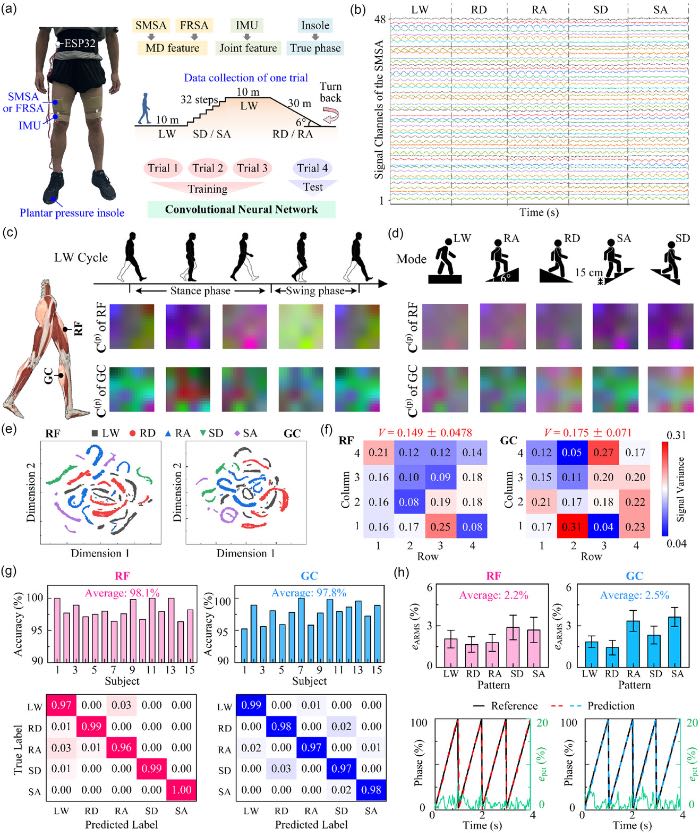
图4 步行监测应用的整体框架
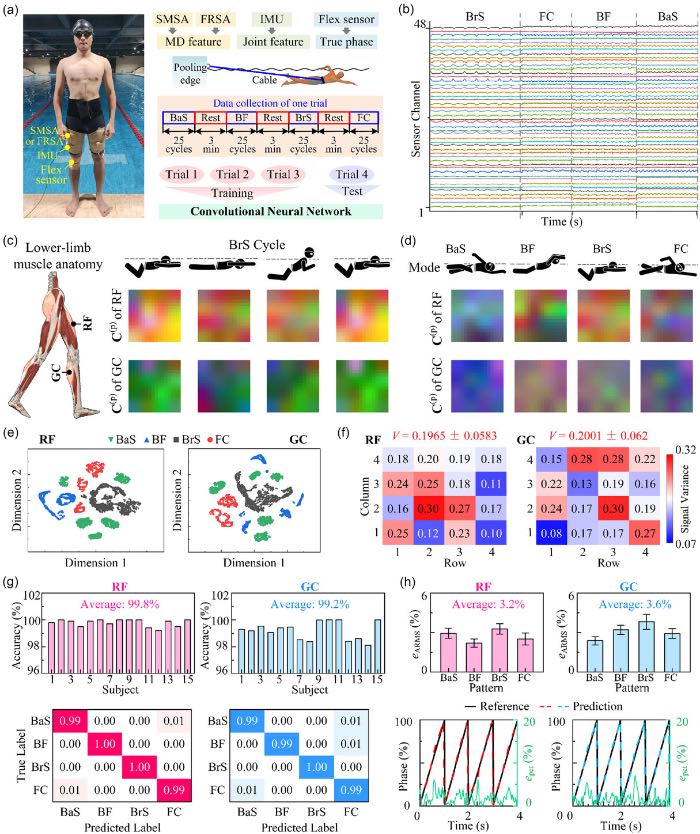
图5 游泳运动监测
实验结果显示,仅使用柔性磁传感器阵列进行两栖运动识别时,15名受试者的平均步态分类准确率高达98.73%,相位估计误差低至2.85%,优于两款现有商用传感器(单个IMU分别为82.40%和10.39%,单个FRSA分别为89.06%和6.33%)。
基于手势识别的机械手控制实时应用
图6展示了基于柔性磁传感器阵列的机器人手控制的实时应用。如图6a所示,柔性磁传感器阵列安装在肱桡肌的前臂肌肉上,其收缩信息对于人类完成各种手势至关重要。实验建立了包含四种手势的数据集用于CNN模型训练,随后将训练好的模型部署在计算机中,实时预测佩戴者的手势以控制机器人手。
图6b展示了四种水陆两栖环境下肱桡肌的C(p)值,该值可区分四种手势,且对环境变化具有鲁棒性。图6c中的t-SNE图进一步验证了C(p)的差异,混淆矩阵表明柔性磁传感器阵列可实现精准的水陆两栖手势分类(陆地环境准确率为98.6%,水下环境准确率为98.3%)。
图6d展示了机器人手的实时控制过程,计算机实时显示分类结果,并控制机器人手执行与佩戴者相同的手势。通过网球和瓶子抓取任务,所提出的系统展现了为截肢者开发动力假肢系统的应用潜力。
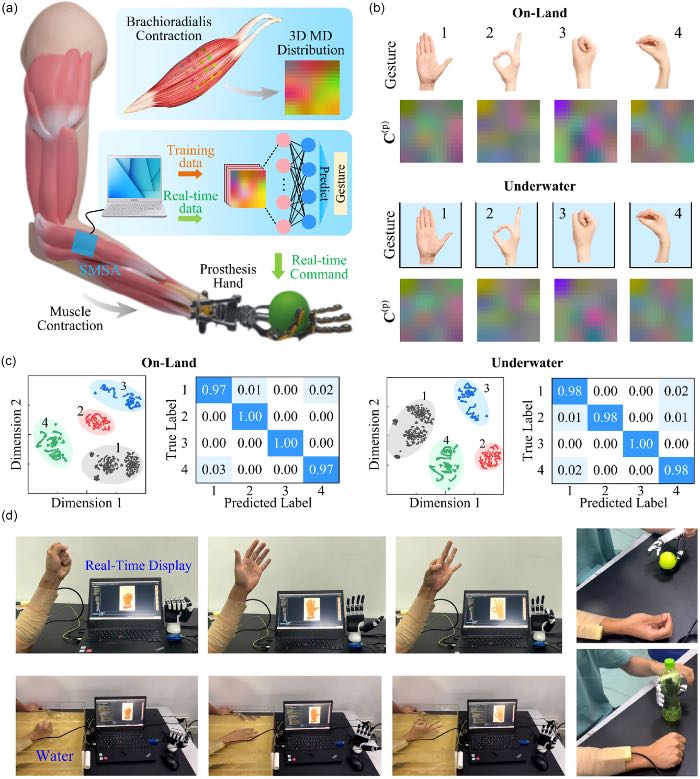
图6 基于柔性磁传感器阵列的两栖手势分类,用于假手实时控制
结论
该研究设计了一种4 x 4节点的柔性磁传感器阵列,用于捕捉3D肌肉形变分布以实现两栖人体运动识别。磁传感器对水的不敏感性使柔性磁传感器阵列在两栖环境中能输出高度一致的测量值,而传感器和电路的柔性设计使其能贴合各类肌肉。传感层的多孔设计在0-100米水深范围内将水压干扰降低了一半,同时压缩灵敏度相较于实体设计提升了10倍。该研究工作可为机器人控制、康复工程和运动科学领域的肌肉状态监测提供有力支撑。
论文链接:https://doi.org/10.1002/aisy.202500315
延伸阅读: