MEMS电化学角加速度计:旋翼无人机姿态检测与控制的范式转变
2026-06-06 16:42:32 来源:麦姆斯咨询 评论:0 点击:
中国科学院空天信息创新研究院、北京航空航天大学的研究人员组成的团队于近日提出了一种基于MEMS技术的高性能电化学角加速度计(EAA),能够实现角加速度的直接、高保真测量。
角加速度在无人机(UAV)姿态精确估计与动力学控制中发挥着至关重要的作用。传统的方法通常通过对陀螺仪输出信号进行微分来获取角加速度。然而,这种间接求导方式不可避免地会引入不利的相位滞后并放大噪声,从而影响飞行控制系统的稳定性。
据麦姆斯咨询报道,针对上述问题,中国科学院空天信息创新研究院、北京航空航天大学的研究人员组成的团队于近日提出了一种基于MEMS技术的高性能电化学角加速度计(EAA),能够实现角加速度的直接、高保真测量。通过理论建模和有限元优化,研究人员设计了一种采用玻璃-硅(Glass-on-Silicon,GOS)封装的紧凑型板式电极结构,可提高流体动力学阻尼和灵敏度。所制备的器件尺寸为22 × 22 × 25 mm³,实现了4.5 V/(rad/s²)的灵敏度和3.12 × 10⁻⁶ (rad/s²)/√Hz的噪声基底(在1 Hz处),且功耗仅为2.4 mW。虽然其本征工作带宽为0.01–0.2 Hz,但通过引入补偿电路成功将其−3 dB工作带宽扩展至10 Hz。
研究人员对该MEMS电化学角加速度计进行了全面性能验证,包括开环转台测试以及结合闭环增量非线性动态逆(INDI)控制器的飞行试验。实验结果表明,与基于陀螺仪信号微分得到的角加速度估计值相比,MEMS电化学角加速度计能够实现更快的指令响应速度和更低的跟踪误差。通过构建一种直接、低时延的角加速度测量架构,本研究为无人机姿态控制中的高保真角加速度测量提供了一种全新的直接感知范式,有望推动旋翼无人机姿态感知与控制技术的发展。上述研究成果以“MEMS electrochemical angular accelerometer: a paradigm shift for attitude detection and control in rotorcraft UAVs”为题发表于Microsystems & Nanoengineering。
工作原理
与传统的MEMS惯性传感器类似,本文提出的MEMS电化学角加速度计的工作动力学可通过由两个独立子系统(机械子系统和电化学子系统)组成的传递函数进行建模。其中,机械子系统充当流体接口,负责将外部角加速度激励转换为电解液的对流流动;电化学子系统则作为换能单元,将这些流体动力学信号进一步转换为可测量的电流信号。如图1a所示,该器件结构主要由三个关键组成部分构成:微电极传感单元、功能电解液和气密封装的环形壳体。传感单元采用对称电极阵列结构,按照ACAC(阳极-阴极-阳极-阴极)或CACA(阴极-阳极-阴极-阳极)的顺序排列,并布置于环形流道的中心位置。
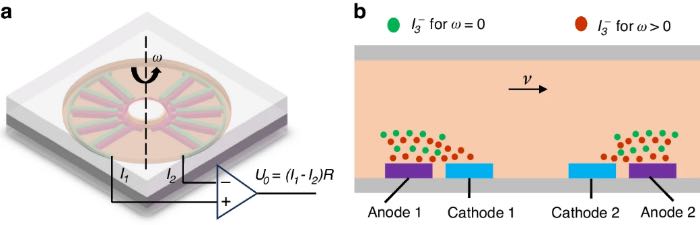
图1 MEMS电化学角加速度计的结构与工作原理
MEMS电化学角加速度计的基本工作原理如图1b所示。在每组阳极-阴极电极对之间施加0.3 V直流偏置电压,从而在微电极界面驱动可逆氧化还原反应。当施加外部角加速度时,电解液质量块的惯性滞后会引发与激励方向相反的相对流动。这种对流运动破坏了稳态浓度分布,使得其中一个阴极的离子通量增加,而另一个阴极的离子通量减少。由此导致两侧电极电流出现不对称现象(I₁ ≠ I₂),进而产生差分输出信号(Uout > 0 V)。该输出信号与输入角加速度的频率和幅值直接相关。
有限元仿真
鉴于MEMS电化学角加速度计的换能机理涉及多物理场的复杂耦合,尤其是流体动力学与电化学的相互作用,本研究在COMSOL Multiphysics环境中建立并求解了一个简化的三维模型。最终,综合系统响应结果表明,与传统平面电极结构相比,所提出的具有板式电极的MEMS电化学角加速度计具有更高的灵敏度以及更宽的工作带宽。
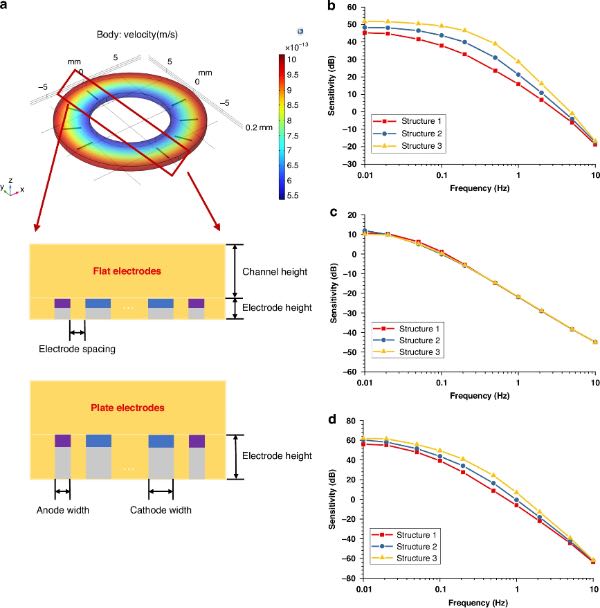
图2 具有板式电极的MEMS电化学角加速度计的有限元仿真
制备工艺
为了实现一种微型化、高性能的电化学角加速度计,研究人员开发了一套可靠的三层微机电系统(MEMS)制造工艺,如图3a所示。图3c为切割后的MEMS电化学角加速度计实物照片,芯片尺寸为10 × 10 mm²。图3d为组装完成的MEMS电化学角加速度计实物照片,整体尺寸为22 × 22 × 25 mm³。
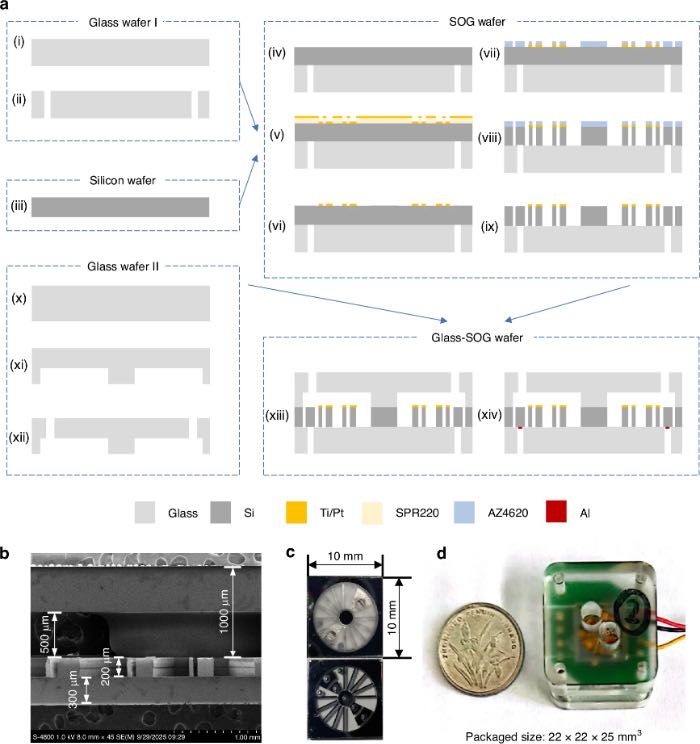
图3 MEMS电化学角加速度计的制备工艺流程及实物照片
MEMS电化学角加速度计作为观测输出的开环实验
为了验证所提出的MEMS电化学角加速度计的性能,研究人员开展了系统性的性能表征和转台测试。
性能测试结果显示,该MEMS电化学角加速度计在0.01 Hz处获得了4.5 V/(rad/s²)的峰值灵敏度(图4a)。此外,该传感器在1 Hz处拥有出色的线性度(图4b),并且其噪声基底仅为3.12 × 10⁻⁶ (rad/s²)/√Hz(图4c)。
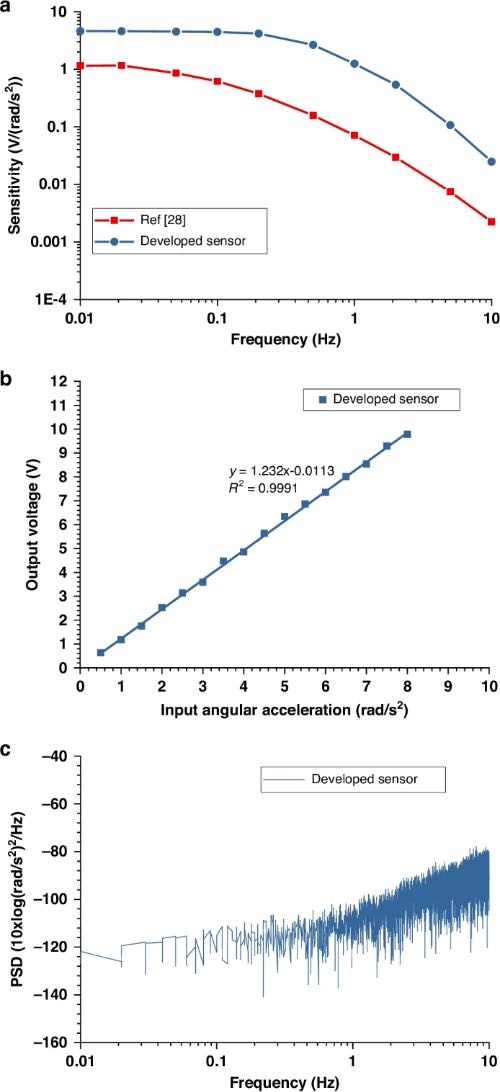
图4 输出性能表征
与此前报道的电化学角加速度计相比,本研究所提出的器件在保持紧凑型尺寸和优异线性度的同时,实现了更宽的工作带宽、更高的灵敏度以及更低的噪声水平,因此非常适用于无人机姿态检测与控制等应用场景。
为了进一步提升器件的高频性能,研究人员引入了一种频率补偿电路。补偿后的测试结果表明,MEMS电化学角加速度计的有效工作带宽被扩展至10 Hz,动态响应性能得到显著增强,从而能够可靠地集成到高机动性无人机平台中。
接着研究人员将MEMS电化学角加速度计集成到无人机系统中(图5),并开展了可靠性测试。对比结果表明,MEMS电化学角加速度计的输出信号与由陀螺仪信号微分得到的角加速度信号高度一致,二者的信号一致性系数超过0.97。更为重要的是,实验发现MEMS电化学角加速度计具有显著的时间领先优势。这种时间优势能够直接转化为控制系统更大的相位裕度(Phase Margin),从而有望提升无人机在剧烈机动飞行过程中的控制稳定性。
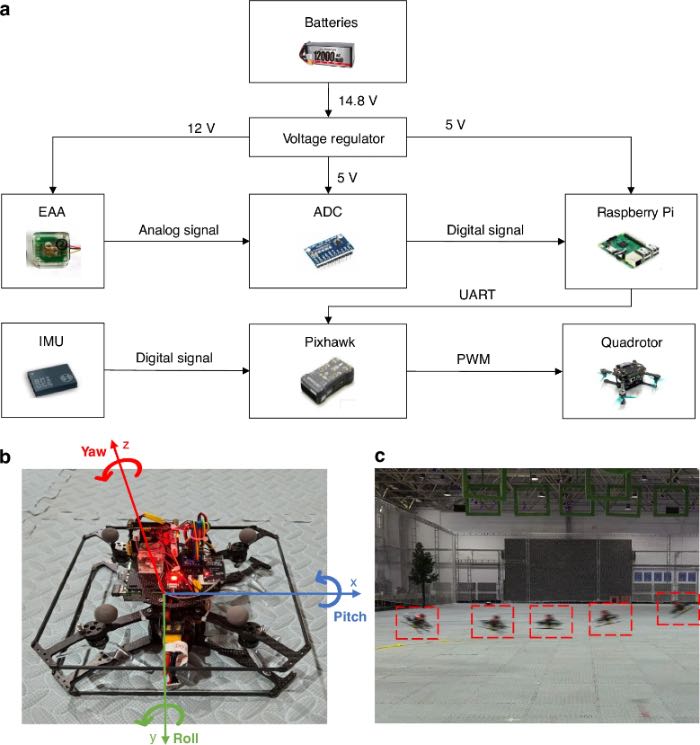
图5 配备MEMS电化学角加速度计的四旋翼无人机的系统设计
MEMS电化学角加速度计作为INDI系统控制输入的闭环实验
为了评估MEMS电化学角加速度计在闭环控制系统中的应用可行性,研究团队设计并实施了两组飞行控制实验,包括阶跃响应测试和悬停飞行测试。
悬停飞行测试结果表明,MEMS电化学角加速度计在低频、小幅度姿态变化场景中具有出色的稳定性,能够精确捕捉悬停过程中微小的角加速度变化,满足无人机悬停姿态监测的精度要求。
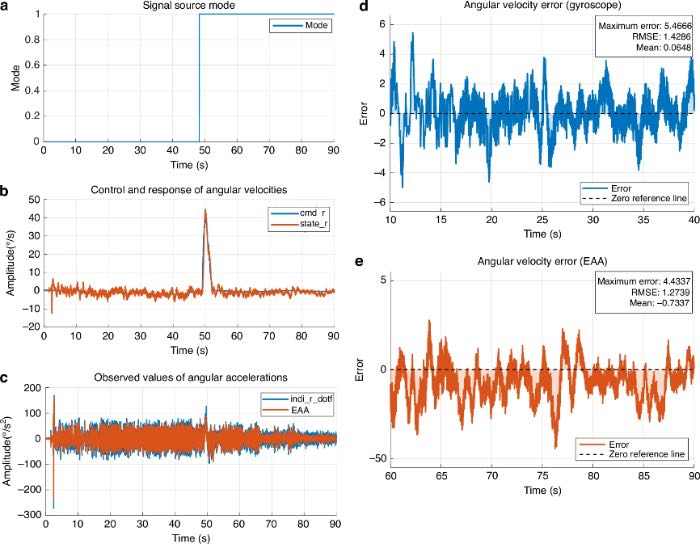
图6 无人机悬停控制和传感器误差分析
结论
综上所述,本研究成功研制了一种新型MEMS电化学角加速度计,其具有高性能板式电极结构。与商用MEMS惯性测量单元(BMI055)的综合对比分析表明,该MEMS电化学角加速度计在性能上具有明显优势,包括显著降低的指令跟踪误差以及更快的瞬态响应时间。总之,这项研究为直接、低延迟的惯性传感范式奠定了基础,对下一代高精度自主航空和机器人系统的发展具有广泛意义。
论文链接:https://doi.org/10.1038/s41378-026-01326-w
延伸阅读:
《高端MEMS加速度计分析:赛峰Colibrys MS1010和美新MXA2500M》
《Senonor MEMS惯性测量单元(IMU)STIM318产品分析》
《村田MEMS惯性测量单元(IMU)SCHA63T产品分析》
《村田MEMS惯性测量单元(IMU)SCH1633产品分析》