综述:面向智能界面的柔性可穿戴触觉传感器
2025-09-07 14:28:07 来源:麦姆斯咨询 评论:0 点击:
该综述论文介绍了柔性触觉传感器的最新进展,重点关注其工作机制、多功能性能,以及在健康监测、人机交互和机器人领域的应用。
智能界面(intelligent interfaces)在服务、医疗和工业领域的快速发展催生了对先进触觉感知系统前所未有的需求。传统的触觉传感器往往在曲面适应性方面存在不足,并且在精细交互中缺乏足够的反馈。得益于柔性电子学和微工程材料的创新突破,柔性可穿戴触觉传感器正在成为一种革命性的解决方案。
据麦姆斯咨询报道,近日,北京理工大学研究团队在Materials期刊上发表了题为“Flexible and Wearable Tactile Sensors for Intelligent Interfaces”的综述论文,介绍了柔性触觉传感器的最新进展,重点关注其工作机制、多功能性能,以及在健康监测、人机交互和机器人领域的应用。第一部分概述了压阻式、电容式、压电式和摩擦电式传感器的主要传感机理,并探讨了性能优化中的材料选择策略。接下来,探讨了多功能柔性触觉传感器的结构设计,并重点介绍其在运动检测和可穿戴系统中的潜在应用。最后,详细讨论了柔性触觉传感器在健康监测、人机交互和机器人中的具体应用。本综述还展望了柔性触觉传感器在医疗护理、虚拟现实、精准农业和海洋监测等多个领域中的广阔前景。
本综述的整体框架如图1所示。其核心内容着重探讨通过优化设计与材料选择来提升柔性触觉传感器性能,同时应对当前技术挑战,旨在系统性地增强智能机器人的能力。
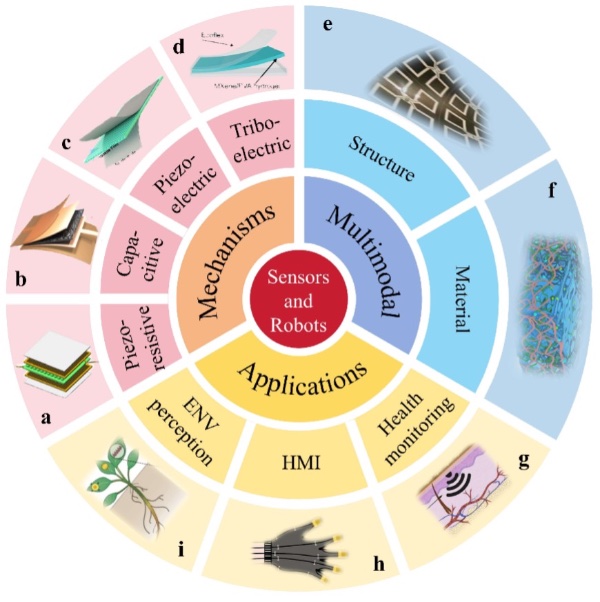
图1 柔性触觉传感器的传感机制、多功能性及其应用示意图
柔性触觉传感器的基本工作原理
柔性触觉传感器能够感知外部的机械刺激(例如应变、压力、剪切和扭转),并将这些刺激转化为电信号。根据其工作机制,柔性触觉传感器可分为压阻式、电容式、压电式和摩擦电式四类。每一类柔性触觉传感器的工作机制如图2所示。
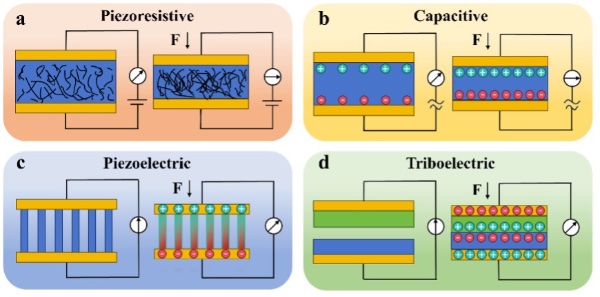
图2 压阻式、电容式、压电式和摩擦电式柔性触觉传感器的工作原理
压阻式触觉传感器的工作原理在于:当材料在机械应力作用下发生形变时,其电阻变化可被观测和测量。这种特性源于导电材料微观结构的动态重构。
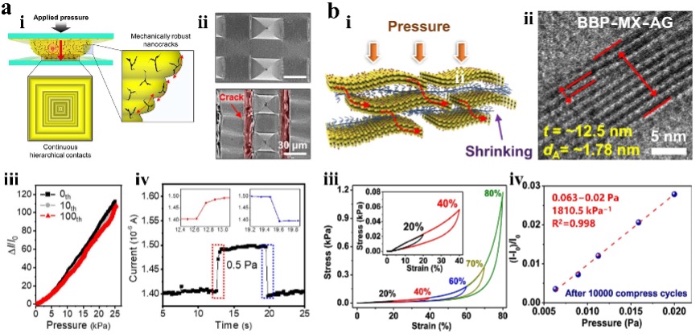
图3 压阻式触觉传感器示例
电容式触觉传感器通过电容变化来检测机械刺激。最基本的电容式传感器采用金属薄膜作为电极,在两个电极之间夹有弹性体介电层。这类传感器具有高灵敏度、高分辨率、响应速度快以及功耗低等特点。通过改变介电材料、优化结构设计或集成高介电常数材料,可以进一步提升柔性电容式触觉传感器的性能。
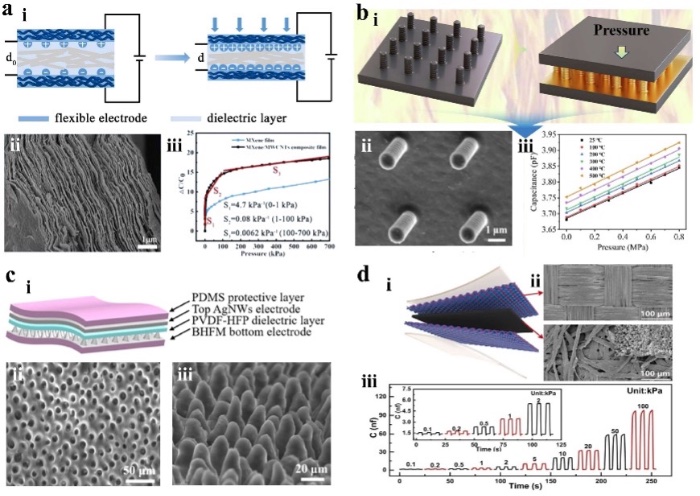
图4 电容式触觉传感器示例
压电式触觉传感器利用存在于非中心对称晶体中的压电效应。当受到机械刺激时,这类材料会因内部极化而产生电荷与电压,将机械能转化为电能。通过测量所产生的电荷与电压,可确定外力的大小与分布。常见的压电材料包括聚偏氟乙烯(PVDF)等聚合物、钛酸钡(BaTiO₃)、锆钛酸铅(PZT)、氧化锌(ZnO)、钛酸铅(PbTiO₃)等无机材料,以及其它复合材料。这类传感器表现出高灵敏度和自供电特性。
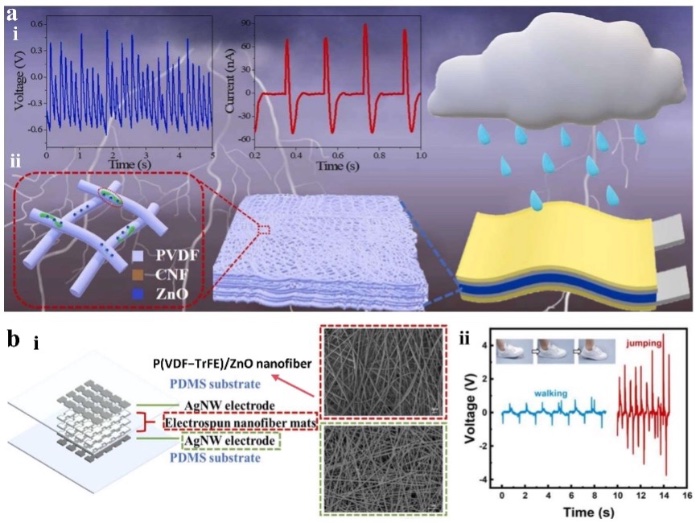
图5 压电式触觉传感器示例
摩擦电式触觉传感器的工作原理基于摩擦起电和静电感应。当两种具有不同电子亲和力的材料接触并相互滑动时,会发生静电荷转移,在界面产生相反的电荷。当材料分离时,带电表面分开,同时静电感应在电极中形成补偿电荷,从而在电极间产生电压差。施加外力可触发摩擦电效应,产生用于检测压力、触摸和振动的电信号。这类传感器可采用多种材料,包括聚合物、金属、织物及复合材料,并可通过引入导电或介电纳米材料来提升灵敏度及优化结构设计,从而改善传感性能。
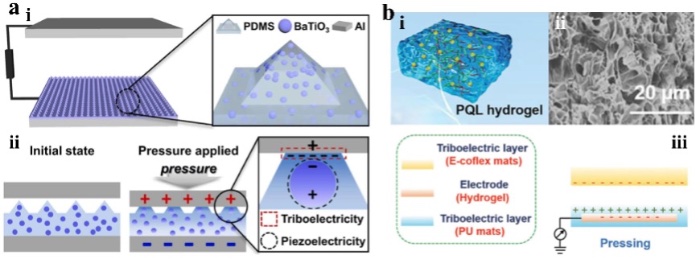
图6 摩擦电式触觉传感器示例
多功能柔性触觉传感器
随着智能可穿戴设备和人机交互需求的不断增长,单一功能的触觉传感器已难以满足复杂应用场景的要求。因此,多功能柔性触觉传感器逐渐成为研究热点。这类传感器能够同时检测多种刺激,包括来自不同方向的压力、滑动接触、温度和湿度,从而显著拓展其应用范围。
多功能性的结构设计侧重于集成单个传感器与多种材料,以捕获多种类型的信息。Zhang等人开发了一种由多个传感单元和柔性印刷电路(FPC)组成的电子皮肤(E-skin)。具体结构包括一个公共环形电极、一个圆形触摸检测电极、四个方形牵引感应电极以及一个四极压力传感器(图7a)。该配置能够检测多样的外部刺激,实现复杂的触觉交互,例如捏合、张开、调节和扭转。
除了特定的图案设计,传感器阵列也常用于结构设计中。Huang等人制造了一种使用宽范围同态传感器阵列和忆阻器阵列的智能系统(图7b)。该系统通过高线性灵敏度与高分辨率捕获外部压力信号,实现高效数据采集与人体呼吸状态的精准分类。
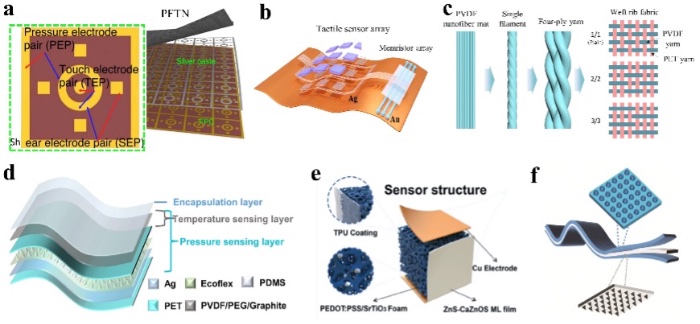
图7 多功能触觉传感器的结构设计
多功能传感通常涉及选择具有多种传感能力的材料。Deng等人设计了一种具有层状多孔结构的聚酰亚胺(PI)-MXene/SrTiO₃纳米复合气凝胶。PI衬底提供结构稳定性,MXene实现压力传感,而MXene/SrTiO₃复合材料则具备热电和红外响应能力(图8a)。该传感器能够同时检测力和温度,并感知红外辐射,为机器人操作臂提供精确的触觉反馈。此外,视觉感知也可增强温度检测能力。Li等人开发了一种利用热致变色微结构的触觉传感器,实现压力与温度的同步测量(图8b)。该传感器降低了干扰并简化了设计,有助于推动低成本多功能传感器的制造。
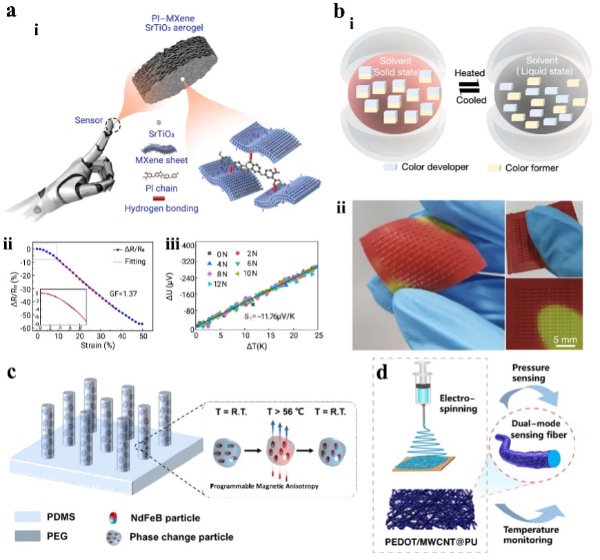
图8 多功能触觉传感器的材料选择
触觉传感器的应用
柔性触觉传感器是智能机器人不可或缺的关键组成部分,具有高灵敏度、可弯曲性以及对多种表面的适应性。近年来,材料科学和微电子技术的进步拓展了柔性触觉传感器的应用场景,并提升了应对现实挑战时所需的柔性与可靠性。在健康监测方面,柔性触觉传感器通过追踪生理参数和运动数据,助力实现个性化医疗与康复。在人机交互方面,它们为增强现实(AR)和虚拟现实(VR)系统提供触觉反馈功能,从而提升交互体验。
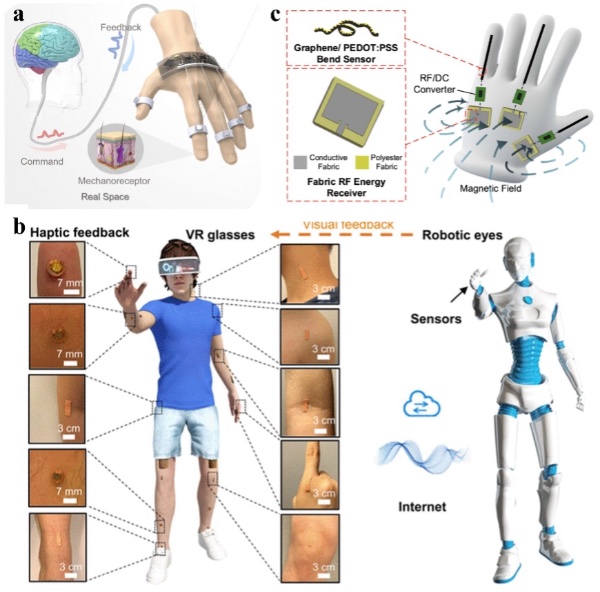
图9 基于人机界面的VR/AR与触觉反馈
总结与展望
综上所述,本文综述了柔性可穿戴触觉传感器在智能系统中的应用,重点探讨其换能原理及多功能传感技术。这些传感器在健康监测、人机交互以及环境监控方面展现出巨大潜力。探讨内容涵盖压阻式、电容式、压电式及摩擦电式触觉传感器工作机制,突出了多功能传感能力对性能提升的作用。
尽管柔性可穿戴触觉传感器前景广阔,但仍存在若干未解决的问题,包括材料耐久性、系统集成、可靠数据处理框架及对不同条件的适应性等。开发高灵敏度且高耐久性的材料可显著提升电导率、机械强度和柔性。此外,集成深度学习模块可促进高效处理与精确识别触觉信号。实施自适应学习算法还可使传感器在特定场景中动态调整数据处理方法。这些进展将有助于智能系统更有效地检测复杂环境中的多种刺激,从而扩展应用范围。
未来的设计可能会专注于开发更小型化的解决方案,以促进用户与技术的自然交互。柔性可穿戴触觉传感器的应用范围预计将在教育、娱乐及工业等领域得到拓展。这一演进将促进社交机器人更好地理解人类需求,同时提升使用舒适度。因此,未来的研究应优先考虑跨学科协作,以此作为该领域持续创新的催化剂。
论文链接:https://doi.org/10.3390/ma18174010
延伸阅读:
上一篇:多轴力和力矩传感器:设计原理与机器人力控制应用
下一篇:最后一页