Baselabs动态网格传感器融合算法增强自动驾驶系统
2021-11-27 10:46:17 来源:麦姆斯咨询 评论:0 点击:
瑞士传感器融合算法专家Baselabs开发了一种可从高分辨率原始传感器数据生成一致的环境模型的算法。与最先进的人工智能(AI)方法相比,动态网格算法可以以集成方式融合不同的传感器模式(如雷达和摄像头)。
Baselabs动态网格(Dynamic Grid)传感器融合算法无需在自动驾驶系统中进行训练。
图片来源:Baselabs
据麦姆斯咨询报道,瑞士传感器融合算法专家Baselabs开发了一种可从高分辨率原始传感器数据生成一致的环境模型的算法。
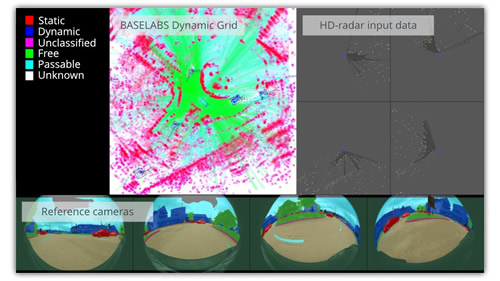
动态网格算法是一种在集成算法中检测静态和动态物体以及估算自由空间的先进方法。这确保了关于物体和自由空间的一致信息没有矛盾。基于ARM和x64的处理器非常适合实时运行该算法。动态网格算法最优地利用了其性能。与最先进的人工智能(AI)方法相比,动态网格算法可以以集成方式融合不同的传感器模式(如雷达和摄像头)。
动态网格算法将周围环境划分为小区域,即所谓的单元。对于每个单元格,该算法确定它是空闲的还是被占用的。如果它被一个物体占用,那么它的速度和行驶方向也会被计算出来。最后,静态和动态物体彼此明确地分开,并与自由空间一起提供用于机动决策和路径规划等。
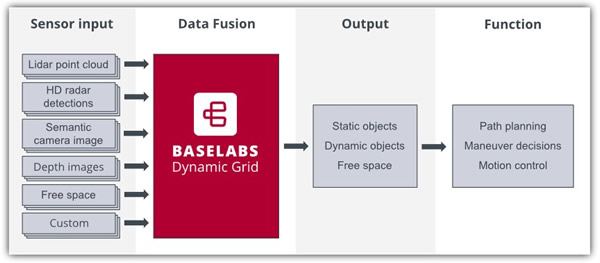
输入/输出(图片来源:Baselabs)
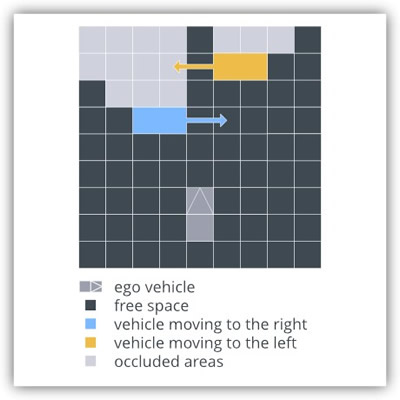
动态网格算法示意图(图片来源:Baselabs)
动态网格算法加速了用于自动驾驶功能的数据融合系统的开发,尤其是在具有挑战性的城市环境中。这避免了耗时的算法训练过程,因此汽车开发人员可以开发出比传统跟踪和网格方法性能更好的驾驶辅助系统(如泊车辅助功能或拥堵自动辅助驾驶等)。
城市地区的自动驾驶功能对所使用的环境模型提出了极高的要求。为了应对城市环境,越来越流行采用高分辨率激光雷达和雷达传感器。然而,占用网格等传统算法面对同时包含静止和运动物体的场景时,在处理点云方面存在严重缺陷。Baselabs开发的动态算法可以在原始数据级别处理来自雷达或激光扫描仪的高分辨率传感器数据。使用带有语义分割的摄像头也是可能的。这提供了一个能够以高精度和鲁棒性检测车辆环境中的动态和静态物体的自洽环境模型。此外,它还可以估算自由空间以识别可驾驶区域或停车位。该算法在汽车的中央处理器(CPU)上实时运行,并根据ISO26262安全流程实施。
动态网格算法特别适用于自动驾驶级别L2及以上的驾驶功能,包括高度自动化的驾驶。典型的应用领域包括自动泊车或泊车辅助功能、具有自动避让功能的紧急制动功能,或拥堵自动辅助驾驶以及雷达子系统。
Baselabs的产品开发主管Norman Mattern表示:“利用动态网格算法,我们提供了一种优于传统跟踪方法和静态占用网格组合使用的替代方案。通过在一种自包含算法中以集成方式处理数据,我们避免了传统方法中两种不同方法的组合经常导致的不一致性。动态网格算法可以显示它的优势,尤其是在车辆环境中有许多物体和不同运动方向的场景中。此外,该算法无需大量训练即可检测和跟踪任意形状的物体。”
延伸阅读:
上一篇:全球首款一体化多成像模式介入设备,将光谱CT成像与血管造影成像无缝衔接
下一篇:主攻驾驶员监控系统,AI计算机视觉厂商Cipia成功上市