自动驾驶的必经之路是传感器融合
2016-10-15 08:57:22 来源:微迷 评论:0 点击:
目前的自动驾驶操作案例采用了各种解决方案,其中有些特定类型的传感器专为某种特定功能提供所需要的数据。然而,更复杂的功能必须共同使用多种不同类型的传感器与连接……

目前的自动驾驶操作案例采用了各种解决方案,其中有些特定类型的传感器专为某种特定功能提供所需要的数据。然而,更复杂的功能必须共同使用多种不同类型的传感器与连接……
先进驾驶辅助系统(ADAS)的诸多功能日益增加在机动车辆上的应用,其中有些功能也已经搭载于中端车款上,如自动定速巡航控制(ACC)和车道偏离警示辅助系统等。但这仅仅只是开始——在未来十年,高度自动驾驶的模式也将成为现实。
目前的自动驾驶操作案例采用了各种解决方案,其中有些特定类型的传感器专为某种特定功能提供所需要的数据。然而,更复杂的功能(如避开交通堵塞的辅助系统)必须共同使用多种不同类型的传感器与连接。传感器与功能之间的联系开始变得更多方向。
有鉴于高度自动驾驶模式所要求的传感器越来越多、功能愈发复杂,我们需要建立一个集中的环境模型,作为不同ADAS功能的基础。该模型以大量的传感器数据为基础,对于数据的评估结果构筑了各种行动的基础。这些行动是道路交通中对车辆所做的实时干预行为,因此,软硬件作业必须具备高性能、高作业安全性以及低功耗。
在打造集中环境模型的过程中,必须使用不同类型的传感器。这些传感器可提供大量的辅助信息,从而降低对于单个传感器的依赖。例如,仅依靠无法达到指定侦测率或对象不存在的摄影机,即所谓的‘假阳性侦测’。在这种情况下,辅助传感器可以使用雷达(Radar)或激光雷达(LiDAR)。
为了合并这些传感器数据到一个统一的视图中,必须具备强大的运算能力。像摄影机或雷达等传感器能够以10Mb/s~40Mb/s的带宽速度传送数据,而在全面的传感器系统中,此数值还可以快速增加到500Mb/s。这些数据必须通过车载网络并由电子控制单元(ECU)进行实时采集。为此,ECU必须可以存取Gigabit Ethernet,包括具有汽车级可靠度与高质量的交换机。
为了准确地反映行车周围环境,ECU不仅要实时接收数据,还必须为数据进行处理。由于传感器可能无法同时侦测到所有的物体,因此,必须按时间顺序对数据进行同步处理;同时,由于每个传感器都根据其位置与侦测方式进行专门的安排,所以还必须按空间顺序分别对数据进行同步处理。除此之外,ECU还必须评估输入数据的合理性,链接不同的数据,并就侦测到的物体与车辆的相关性或即将执行的措施(如转向或煞车)进行分类。为此,则必须使用系统单芯片(SoC)搭配主控制器(MCU)的高性能架构。
当主CPU控制致动器时,SoC提供运算能力。除了使用DDR3或LP-DDR4接口实现较大的内存带宽外,SoC还必须能通过Gigabit Ethernet和PCI Express,为传感器和其他运算单元提供高速链路。数据的处理与评估需要多倍1000DMIPS,以实现高达数个10000DMIPS的运算能力。
这要求芯片结构具有足够的尺寸,例如连接至微处理器(MPU)与硬件加速器的多层总线和高速缓存。例如瑞萨电子(Renesas Electronics)的第三代装置R-Car H3系列等,专用于处理这种任务。DDR接口可提供峰值达到51.2GB/s的有效带宽,并可实现很高的平均传输速率。对于数据处理,瑞萨电子已经采用了运算能力高达40000DMIPS的最新ARM-v8A 64位Cortex-A57/Cortex-A53 CPU核心。除了标准的MPU,专用的硬件加速器也已经被用于在低功耗状态下提供额外的性能。这可通过使用通用绘图处理器(GP-GPU)和特殊的视觉处理器来实现。由于视觉处理器能够实现平行指令处理,因此在处理大量数据数组时的速度大幅提升;这是因为这些处理器能够根据所使用的算法类型,提供SIMD或MIMD等执行模式。
同时,传感器融合ECU作业与安全息息相关,并且必须符合通用的安全标准。目前,汽车产业广泛使用ISO26262安全标准来实现攸关安全功能的安全目标。从车辆下层架构一直到其上的内部ECU细节信息,都必须接受安全分析,包括对各层开发过程和技术架构的检验,以降低系统或随机的硬件故障风险。其结果是在汽车安全等级的分类中,包括从最低的质量管理安全等级(未考虑任何的安全措施)到最高的ASIL-D等级(汽车安全完整性等级D)。
ASIL等级对预定时间内发生故障的机率进行了说明:在系统级,100FIT要求安全等级达到ASIL-B,10FIT要求安全等级达到ASIL-D。MCU提供ASIL的支持,例如支持ASIL-D的RH850-P1H该系列正成为标准配置。然而,在SoC中执行安全要求是一种新措施,而且仅在人们对于高度自动驾驶车的需求提高时才需要。由于SoC架构的复杂度,在以最低附加系统成本实现功能安全时,需要具备对于基础安全机制整合的详尽专业知识与经验。因此,例如,建置较大的Cortex-A CPU,包括其高速缓存作为锁步双核心设计(一种以较小CPU为ASIL-D应用设计安全MCU的常见解决方案),在经济上对于SoC并不可行。这对于GP-GPU等复杂的电路情况也相同,因为它无法进行冗余设计。
因此,作为自动驾驶模式的关键安全方面,必须对安全要求和目标应用案例进行详细分析。这是评估有关安全与大规模生产成本效率的唯一途径。另一个案例是内存的实现。如果使用不同几何尺寸的平面技术,每朝向更小的几何尺寸进一步,FIT就增加一级。在包含多个兆字节整合SRAM的SoC中,底层FIT等级在考虑安全机制之前自然较高。为了达到ASIL-B的目标标准,选择一种正确的纠错方式,例如ECC和使用finFET晶体管的实体措施都是必备的。
另一项要求是,在行驶期间对所有相关的、随机发生的硬件故障进行检测,而且,系统必须采取措施,以确保这些故障不会妨碍驾驶的安全性。这虽然可能导致可用的功能减少,但重要的是可避免威胁生命的情况的发生。因此,根据受影响的功能,必须设计一种功能来预防在先进自动驾驶模式下出现故障,从而确保车辆即使在故障发生时仍能保持安全行驶。
最简便的方法就是多提供一个备用的ECU,并在主路径处于安全模式时使用第二个运算路径。由于重复进行操作,使得这样的系统成本较大,而且,除了需要更大的空间外,还会导致更高的功耗。由于控制ECU通常也对于冷却带来限制,可用的功率预算通常低于20瓦。这包括一个提供多种功能的SoC,包括高运算能力和功能安全性、与通讯交换机进行极快的网络连接、大容量内存、高安全性MCU以及相应的功率转换级。
因此,该ECU的所有组件都必须具备很高的能效。特别是SoC,必须利用现有的最新制程和电源管理技术,如绝缘技术(减少未使用电路模块的漏电现象)、频率闸控技术以及动态频率频率调整技术,从而使SoC的功耗保持在10W以下。专用于汽车产业的硬件加速器对于能效的提升也贡献良多。
融合传感器的新挑战及因应方案
同时,融合不同的传感器和功能,也对软件建置带来新的挑战。这对半导体供应商及其合作伙伴提出新的要求,并呼吁实现高度自动驾驶模式的新方法出现。
在大多数情况下,MCU软件使用的汽车开放系统架构(Automotive Open System Architecture;AUTOSAR)并不适于现代复杂的CPU执行易失存储器分配与多线程功能。因此,使用复杂的实时操作系统,与现有的AUTOSAR机制进行互动以及使用时隙方法并控制共享资源,被看作是一种创新的解决方案。
这种架构让ECU在不影响基础系统的情况下接受和执行更新。此外,这种架构还可让来自不同供货商的软件得以共存。这种机制不仅能在开发和整合阶段促进规划(在此阶段,先进行独立开发,然后进行整合),而且还有利于操作过程中确定性任务的执行。这种机制很重要的原因是因为几乎没有任何单一供货商可以掌握必要的专业知识来因应在单一ECU中结合的所有服务。
因此,不同的软件套件可以共享现有CPU、硬件加速器和通讯网络的作业资源,而不至于发生相互阻碍或占用共享资源的情况。这种模式是对基于传感器融合的ECU提出的最重要要求之一。为此,必须在运行时间使用专用工具。例如,瑞萨电子正与加入R-Car联盟的业界伙伴合作,他们掌握了这些机制,并为每个软件模块定义界限以促进可预见且可靠的软件模块整合。
传感器融合是高度自动驾驶模式的关键组件,它需要各种最新技术、高效能SoC和MCU的组合,加上最高度的功能安全标准,结合软件与中介固件领域中经验丰富的系统整合商和主要合作伙伴提供的专业知识。这些组合可以确保人性化和安全的建置,最终可为驾驶人提供多种选择:在多重安全机制下辅助自动驾驶,或者让车辆在自动驾驶模式下行驶。
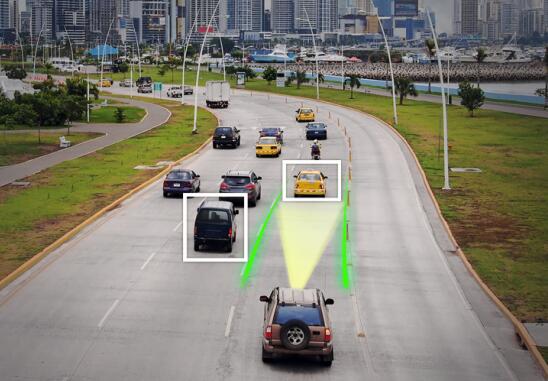
具有先进自动驾驶功能的汽车在公路上行驶
相关报告: