传感器融合软件简化自动驾驶汽车、无人机和机器人设计
2017-06-28 14:41:55 来源:麦姆斯咨询 评论:0 点击:
Mottin称这款传感器融合软件的核心是能够执行一种被称为占用栅格的技术,而不再需要浮点单元(floating point unit)。利用整数单元取代浮点单元,能够获得更小的软件。因为其计算强度更低,能够嵌入同时控制车辆传动系统、车身安全以及ADAS应用的单个MCU(微控制单元)。
一款嵌入微控制器,采用新算法的传感器融合解决方案,可以帮助开发者实现在无人驾驶汽车、机器人以及无人机等领域的广泛应用。
这款新的传感器融合软件被称为SigmaFusion,能够帮助工程师更高效地处理来自雷达、LiDAR、摄像头以及超声波传感器的海量数据,同时还能减少整个系统所需要的电子控制单元数量。“我们优化了软件,使其能够适用于更广泛的应用,”法国CEA Leti研究院的研究工程师Julien Mottin说,“即使将它在更小的平台上运行,在计算精度上也不会有缺陷。”
Mottin称这款传感器融合软件的核心是能够执行一种被称为占用栅格(occupancy grids)的技术,而不再需要浮点单元(floating point unit)。利用整数单元取代浮点单元,能够获得更小的软件。因为其计算强度更低,能够嵌入同时控制车辆传动系统、车身安全以及ADAS(先进驾驶辅助系统)应用的单个MCU(微控制单元)。
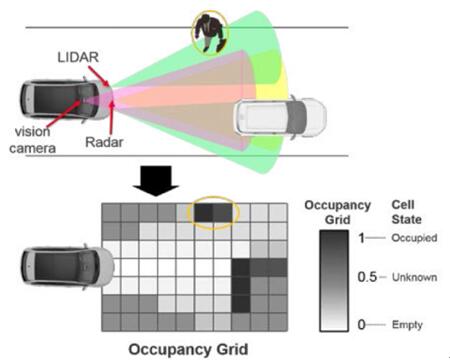
Leti开发的SigmaFusion无需浮点运算,能够计算前方路径识别所需要的占用栅格

Infineon(英飞凌)近期发布的Aurix TC29x平台应用了SigmaFusion传感器融合算法
通过摈弃浮点算法,Leti的研究人员称他们的这款产品不仅能够应用于自动驾驶汽车,还可以应用于机器人、无人机等更小的应用。Leti还正在与一家供应商合作,将SigmaFusion应用于盲人手杖中。在该应用案例中,传感器融合套装可以从传感器获取信息,为使用者提供障碍物声音警示,并且它不仅能够提供用户路径中腿部的障碍物警示,还能提供头部障碍提醒。这款传感器融合算法在这些应用案例中,省去了成本高昂的硬件平台,因而能够帮助降低系统成本。
Mottin补充称,SigmaFusion还能提供传感器路径上,表征可用空间(free space)以及障碍物所带来的优势。占用栅格是这款软件能够识别树木、汽车和行人等障碍物的核心。但是,通过表征可用空间,能够为前方路径提供另一个层级的安全保障。
“全面评估道路安全,不仅需要探测障碍物,还需要知道前方有多少安全的可用空间,”Mottin解释道。
该技术已经成功应用于英飞凌的Aurix TC29x平台。Leti还正与其它未署名的供应商合作,将这款传感器融合软件嵌入它们的MCU。
Mottin称他们预计这款传感器融合软件的初期应用会是在汽车领域。“区别在于我们已经能够将软件优化到足以适配汽车级平台,尤其是那些ADAS应用,”他说,“凭借这款传感器融合软件,便不再需要复杂的图像处理单元或加速引擎。”
延伸阅读:
上一篇:巧用热成像技术实现违章监控
下一篇:NEC人脸识别技术用途广