面向触觉感知的磁性材料与磁触觉传感器综述
2026-05-30 22:31:47 来源:麦姆斯咨询 评论:0 点击:
本文综述了面向触觉感知的磁性材料与传感器的最新研究进展,重点阐述了磁弹性体的设计策略以及用于触觉感知的磁传感器发展趋势。
近年来,智能机器人和人机交互领域取得了显著进展。触觉感知作为一项关键使能技术,在助力这些新兴领域实现更自然的人机交互与灵巧操作方面发挥着关键作用。触觉感知既迎来了前所未有的机遇,也面临着诸多挑战。磁触觉传感器作为触觉感觉技术中的有力竞争者,具备高灵敏度、优异空间分辨率、强耐用性以及多方向力检测能力等独特优势。
据麦姆斯咨询报道,中国科学院宁波材料技术与工程研究所和中国科学院大学近期综述了面向触觉感知的磁性材料与传感器的最新研究进展,重点阐述了磁弹性体的设计策略以及用于触觉感知的磁传感器发展趋势。此外,还介绍了磁触觉传感器在机器人、人机交互、医疗健康等多个领域的应用情况。最后,深入探讨了磁触觉传感器面临的技术挑战,并提出了未来发展方向。相关研究成果已经以“Advances in magnetic materials and sensors for tactile perception”为题发表于Review of Materials Research期刊。
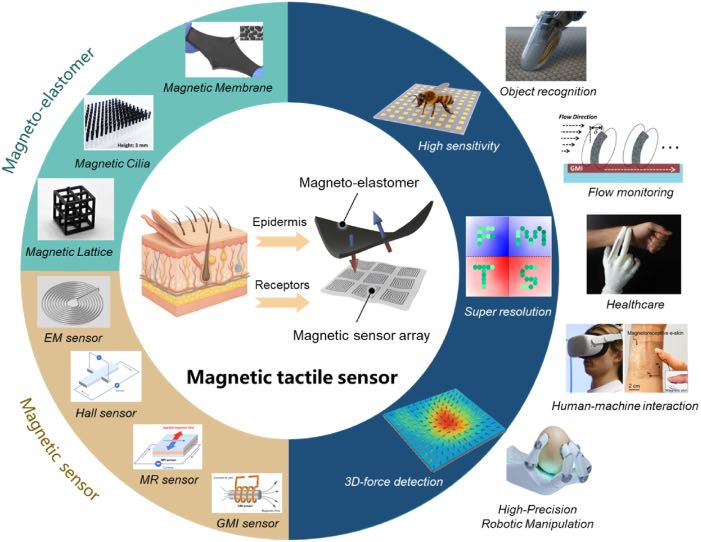
图1 磁触觉传感器的主要组成部分、特点及潜在应用
面向触觉感知的磁弹性体研究进展
在磁触觉传感器中,磁弹性体充当换能介质,可将施加的机械力转换为可测量的磁信号。当外力作用于这种复合材料时,会导致材料发生形变。这种形变会使嵌入的磁性颗粒发生位移并改变其取向。因此,外部磁场会被重新配置,进而引起杂散磁场的强度和取向发生变化。随后,磁传感器会检测这些变化,并将其转化为相应的电输出(图2)。
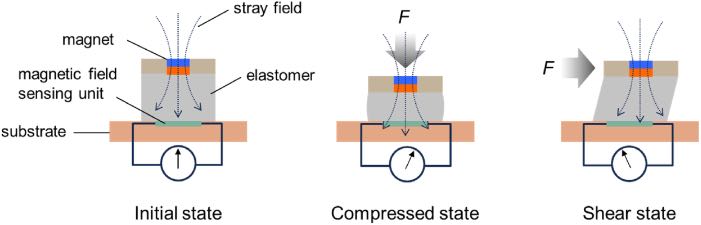
图2 触觉传感器工作原理示意图:左:传感器初始状态(无载荷);中:传感器在法向载荷下的变形与输出;右:传感器在剪切力作用下的变形与输出。
通常,磁弹性体由两种功能组分构成:(ⅰ)磁场源,包括永磁体、软磁颗粒、永磁颗粒以及载流线圈;(ⅱ)弹性基体,其通常由有机硅聚合物组成。软磁材料具有低剩磁的特征,不适合作为磁场源。因此,其在触觉感知中的应用需通过与其它功能材料和传感器集成,利用其动态物理效应。
基于上述功能组分,磁弹性体主要分为三种结构形式:(ⅰ)磁性膜,其为平面结构,厚度范围从微米级到毫米级;(ⅱ)磁性纤毛,为垂直结构,可通过控制复合比例调控长径比,实现杨氏模量的定制化与磁场强度的可调性;(ⅲ)磁性晶格,其设计用于平衡杨氏模量与磁场强度。这些结构形式展现出不同的器件特性,例如灵敏度、检测范围、制备复杂度等。
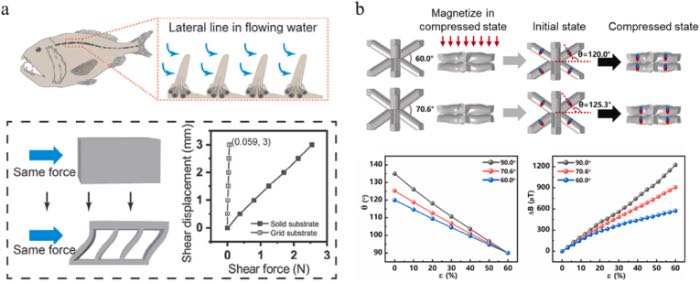
图3 (a)仿鱼侧线网格弹性体与传统实体弹性体在相同剪切载荷下的变形位移对比;(b)体心立方晶格磁弹性系统的制备过程。
该综述重点阐述了磁弹性体的制备方法和设计策略。
面向触觉感知应用的磁传感器研究进展
在磁触觉传感器中,磁传感单元将磁通量转换为电信号,通过对电信号的重构实现对外力的精准评估,包括外力的幅值、方向及分布情况。
截至目前,触觉感知应用领域已出现多种类型的磁传感器,根据其核心物理机制可分为:电磁线圈、霍尔效应传感器、各向异性磁阻(AMR)传感器、巨磁阻(GMR)传感器和隧道磁阻(TMR)传感器,以及巨磁阻抗(GMI)传感器。这些传感器在灵敏度、动态范围等关键性能指标方面表现出显著差异,而这些差异本质上由其独特的磁输运现象决定。
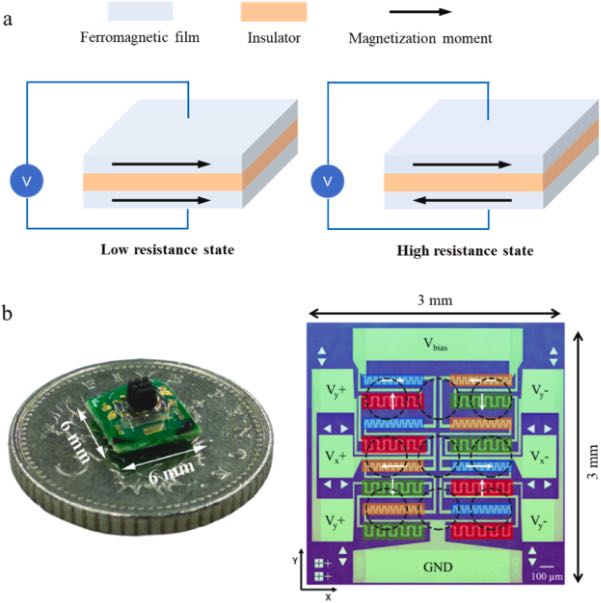
图4 (a)TMR效应示意图;(b)TMR磁触觉传感器实物照片。
本文通过对该领域文献的全面梳理,对触觉应用中各类磁传感器的结构配置与性能指标进行了系统研究。霍尔效应传感器和电磁线圈通过直接测量磁场实现工作,而磁阻传感器则通过检测自身电阻随磁场变化的间接方式工作。这一根本差异决定了它们截然不同的输出特性与器件性能。因此,电磁线圈、霍尔、AMR、GMR、TMR及GMI传感器等各类磁传感器,在灵敏度、噪声、工作范围和功耗等核心性能指标上均存在显著差异。在集成性方面,霍尔传感器与磁阻传感器得益于其平面制造工艺,可实现高密度集成,而电磁线圈固有的三维几何结构则成为其小型化的核心瓶颈。
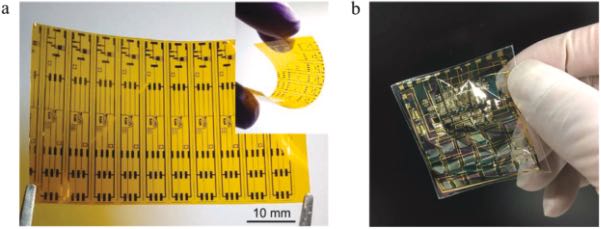
图5 (a)柔性磁传感阵列系统由1个GMR传感器、16个铟镓锌氧化物薄膜晶体管和1个大电流输出放大器薄膜晶体管组成;(b)柔性有源矩阵磁电子皮肤。
尽管磁传感器已经发展得相对成熟,但触觉感知应用仍提出了新的要求。例如,为了适配曲面,磁传感单元需要具备柔性;为了获得高空间分辨率,磁传感阵列需要以较高的密度制备。该综述详细探讨了面向触觉感知的磁传感器的发展趋势,主要包括:提升柔韧性、集成度以及优异的多轴传感性能等。
磁触觉传感器的应用
随着触觉传感器性能的持续突破,其功能实现已从基础的力学检测拓展至多维环境感知,包括纹理识别、物体分类以及流体动力学监测。基于这些功能,研究人员已在机器人系统、人机界面和生物医学设备等多个领域成功实现触觉感知系统。该综述重点介绍了磁触觉传感器在机器人技术和医疗保健领域的应用。
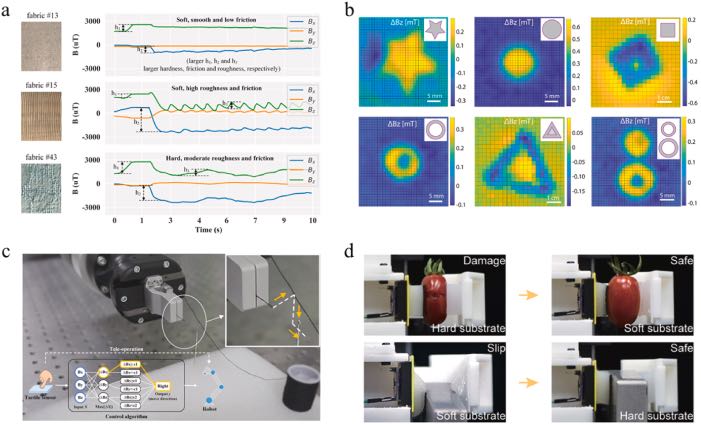
图6 (a)各类织物的识别测试;(b)物体识别测试结果;(c)利用传感器单个单元进行遥控穿针的演示;(d)传感器可通过更换基底适配不同工作场景。
触觉传感器使机器人能够感知力、纹理、刚度、形状等物理特性,从而实现对物体更精准的抓取与操作。例如,可对纹理进行表征,以获取表面粗糙度、周期性和硬度等物理量。近年来,磁触觉传感器在纹理识别领域的应用日益广泛。
除了纹理感知外,物体识别还需要整合表面纹理、三维几何形态和刚度等多维度特征。结合机器学习技术,磁触觉传感器已成功实现物体形状识别。触觉传感器在纹理与物体识别方面的持续提升,也推动了机器人操作能力的增强。磁触觉传感器已被用作机器人夹持器中的触觉反馈元件,以实现物体抓取。
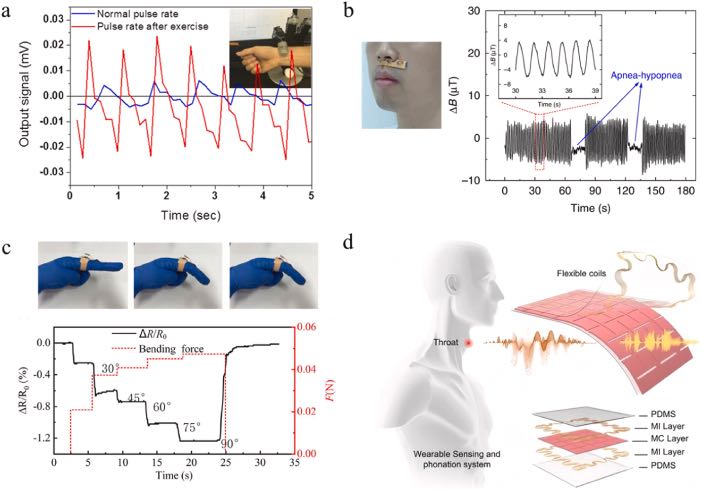
图7 (a)远程触觉传感系统在静息和运动后两种条件下的心率和相对血压测量结果;(b)睡眠呼吸暂停监测的测试结果;(c)关节运动的测试信号结果;(d)可穿戴传感-驱动系统的结构示意图。
触觉传感器在医疗保健领域发挥着至关重要的作用。例如,在微创和机器人辅助手术中,它能实现力反馈和触觉感知,从而减少对组织的损伤。对于智能假肢而言,磁触觉传感器能够模拟类皮肤触感,让使用者能够感知握力、温度和质地,实现更自然的控制。在健康监测和可穿戴设备中,磁触觉传感器能够支持对呼吸、心跳和脉搏的实时追踪。
挑战与未来方向
过去十年来,磁触觉传感器发展迅速,呈现出高灵敏度和高柔性的发展趋势。众多磁传感器已应用于触觉传知,能够检测毫牛甚至微牛级的微小力,彰显了磁传感器在触觉传感领域的巨大潜力。此外,磁弹性体的设计赋予了传感器额外的功能,例如三维力解耦以及对压力和剪切力的高精度感知。尽管相关研究已取得显著进展,但磁触觉传感器仍处于发展初期,仍有若干关键挑战亟待解决。
(1)磁弹性体是力-磁信号转换的核心换能介质,在触觉感知架构中发挥着关键功能作用。尽管磁弹性体的研发已取得可喜进展,但要赋予其兼具高力-磁通量转换效率、多力解耦能力、更快响应时间和更低滞后性的综合优势,仍面临不小挑战。为满足这些需求,磁弹性体的材料选择标准、结构设计范式以及磁性能工程都需要进一步优化。
(2)柔性磁传感单元的开发对于实现全柔性磁触觉传感器至关重要。然而,它们在触觉传感中的应用不可避免地会使其承受扭转、弯曲和拉伸等复杂应变场。尽管已有大量相关研究报道,但在弯曲、拉伸等形变作用下,磁性材料的磁转变温度、磁各向异性和磁畴等性能会因应力和应变发生改变。这会进一步影响磁传感器的整体性能,包括但不限于灵敏度、功耗和应用场景。目前,复杂应变下磁性的演变及其潜在的调控机制仍是亟待深入探索的核心问题,同时这也对器件的变形能力和机械稳定性提出了更高要求。未来的研究可聚焦于材料改进,例如可采用结构设计方法实现应变隔离或更均匀的应力分布,从而提升器件的变形能力与机械稳定性。
(3)在仿生机器人领域,触觉传感器是实现灵巧机械手完成精准操作的关键部件。它们不仅需要具备高力灵敏度,还需拥有高空间分辨率。基于阵列的设计是提升空间分辨率的有效方法,但其实际应用仍面临诸多挑战。因此,持续研发具有更高灵敏度和更低功耗的磁传感单元至关重要。除了改进磁传感器之外,电路架构的范式转变,对于大幅降低数据传输量和整体功耗也至关重要。其次,在制造过程中,微小的工艺波动可能导致各个传感单元的性能出现差异,这会破坏阵列的整体一致性,还可能降低其有效空间分辨率。
(4)人类皮肤能够无缝整合触觉、温度和痛觉感知,而现有的柔性磁触觉传感器大多是单功能的,仅专注于力信号检测。为了填补这一空白,一个关键的发展方向是研发多模态人造皮肤,例如双模温度与触觉传感器。推进卷积神经网络、人工神经网络等智能算法的发展至关重要。借助机器学习算法对信号进行整合分析,系统便能实现从多模态感知到多模态认知的转变。最终,具备生理信号检测功能的类皮肤系统将得以实现。
未来,集成超高性能、极致柔性与多模态感知能力的磁触觉传感器,将在机器人精准操作、仿生电子皮肤到精准医疗等前沿领域解锁广泛应用。
论文链接:https://doi.org/10.1016/j.revmat.2025.100110
延伸阅读: