新型MEMS激光雷达发射光学系统,实现大扫描角度和高空间分辨率
2025-08-30 10:20:16 来源:麦姆斯咨询 评论:0 点击:
为解决MEMS微镜扫描角度小以及现有光学系统局限性所带来的问题,由浙江大学、浙江大学湖州研究院等机构的研究人员组成的团队提出了一种新型MEMS激光雷达发射光学系统,能够实现大扫描角度和高空间分辨率。
激光雷达(LiDAR)由于具备高分辨率、高测距精度以及强抗干扰能力,已被广泛应用于自动驾驶、机器人导航和无人机避障等领域。基于微机电系统(MEMS)技术的激光雷达因其微型化和半固态特性而受到广泛关注。然而,MEMS扫描微镜及其相关激光雷达系统的小扫描角度导致了诸多问题,例如扫描范围受限和空间分辨率较低,从而阻碍了MEMS激光雷达的更广泛应用。
据麦姆斯咨询报道,为解决MEMS微镜扫描角度小以及现有光学系统局限性所带来的问题,由浙江大学、浙江大学湖州研究院等机构的研究人员组成的团队提出了一种新型MEMS激光雷达发射光学系统,能够实现大扫描角度和高空间分辨率。该系统基于反射镜阵列和菲涅尔棱镜,在保持高空间分辨率的同时实现目标区域大角度扫描。其扫描范围达120° × 60°,空间分辨率为0.05° × 0.25°,光束充填率达到90.63%。上述研究成果以“Design of a Transmitting Optical System for Large-Angle MEMS Lidar with High Spatial Resolution”为题发表于Photonics期刊。
扫描系统利用菲涅尔棱镜实现大角度MEMS微镜的高填充率,如图1所示。系统的光源采用光纤激光束阵列,经过特殊设计的菲涅尔棱镜后,不同位置的激光束会产生不同的偏转角度。出射光束经反射镜聚焦至MEMS扫描微镜,确保光束保持准直状态。MEMS微镜接收相应控制信号后扫描目标区域。受机械结构等因素限制,阵列激光束间存在较大间隙,此布局需采用更大尺寸的菲涅尔棱镜,不利于棱镜加工与微型化设计。因此本研究提出采用反射镜阵列将激光束阵列从稀疏阵列转换为紧凑激光束,从而实现光束偏转。这两套扫描系统上下结合,进一步提高了空间分辨率。上下扫描系统组装固定时,两组阵列激光束在垂直方向上交错排列,间距为光斑间距的一半,满足系统高填充率的要求。
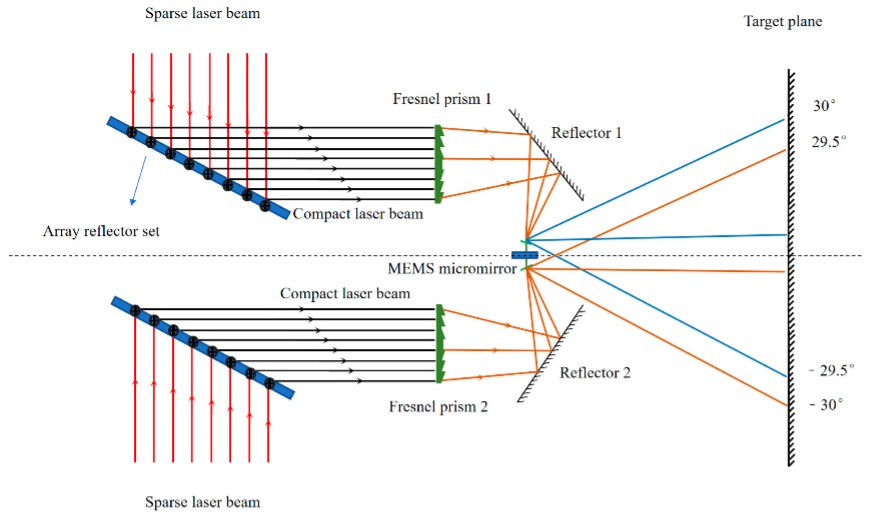
图1 多光束、大角度、高填充率扫描系统结构示意图
本文设计的菲涅尔棱镜需同时实现两项功能:将激光束从不同位置偏转至MEMS微镜,并以不同扫描角度分配阵列激光束。此外,必须确保发射的激光束保持平行,且不损害光束质量。
该系统可以采用单轴扫描镜或二维扫描镜。单轴扫描镜具有成本低、控制简单以及水平扫描角度大的优点;而二维扫描镜虽然成本更高,但其空间分辨率更高,如图2所示。阵列激光束能够形成更高密度的激光点阵,同时该系统的可扩展性也较强。
图2 二维扫描的光束分布
反射镜阵列的工作原理如图3所示。该反射镜阵列可将稀疏的激光束阵列转换为紧凑的激光束阵列,从而更好地与后续的菲涅尔棱镜相匹配。通过合理布置反射镜,原始间距为h₁的激光束阵列可以被转换为间距为h₂的紧凑型激光束阵列。通过两组反射镜阵列的设计,可以使激光束阵列与菲涅尔棱镜不处于同一平面,这降低了系统组装的难度,使整体系统更加灵活。
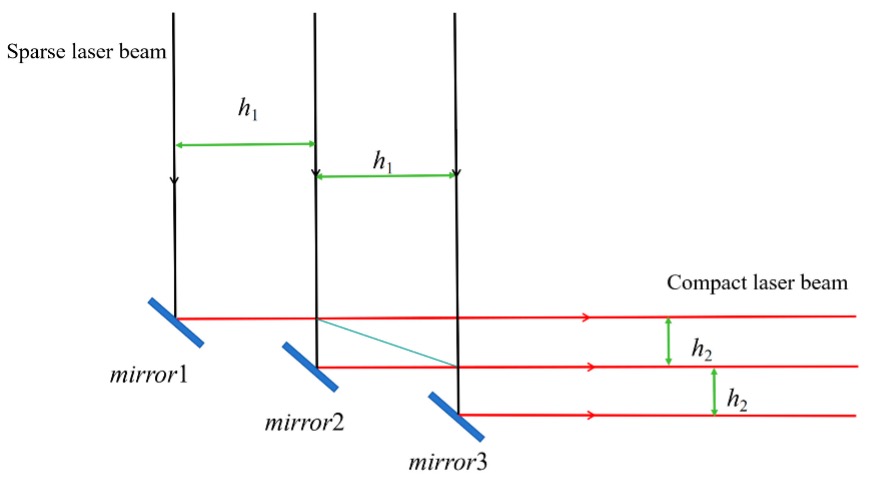
图3 反射镜阵列的工作原理示意图
系统中的菲涅尔棱镜为平面菲涅尔棱镜,棱镜的中心称为第0环,其外侧依次为第1环、第2环,依此类推,由内向外排列。第0环的半径记为h₀,第i环中点到棱镜中心的距离记为hᵢ。图4a显示了平行光垂直入射通过菲涅尔棱镜平面后的会聚光路图。
当平行光从第i环的棱镜部分入射时,由于其为垂直入射,因此在点M不会发生偏转;但当光线穿过透镜到达点N时,由于此处光线与出射界面不再垂直,因而会产生偏转(图4b)。
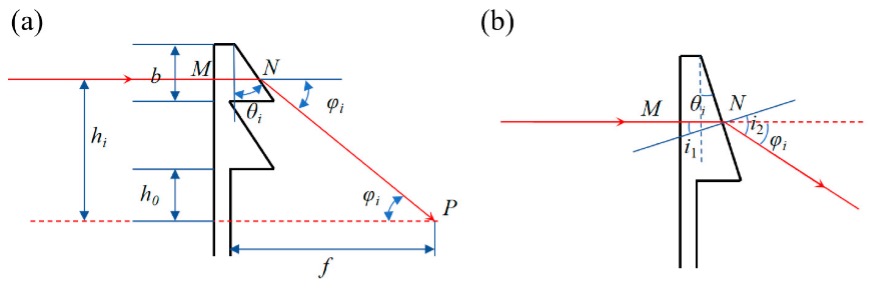
图4 大视场、高聚光接收系统的光路图
通过理论计算设计出了一种满足要求的高性能菲涅尔棱镜,并利用Zemax光学设计软件进行了仿真分析。系统的整体光路如图5所示。阵列激光束经过菲涅尔棱镜后仍保持与棱镜平行,随后所有激光束经由反射镜反射至MEMS微镜。MEMS微镜通过一维扫描实现目标平面的大角度、高空间分辨率扫描。可以看出,所有激光束均被反射到尺寸极小的MEMS微镜上,且反射后的光束质量未受损,依然保持为平行状态,不同光束则分布在不同的角度上。
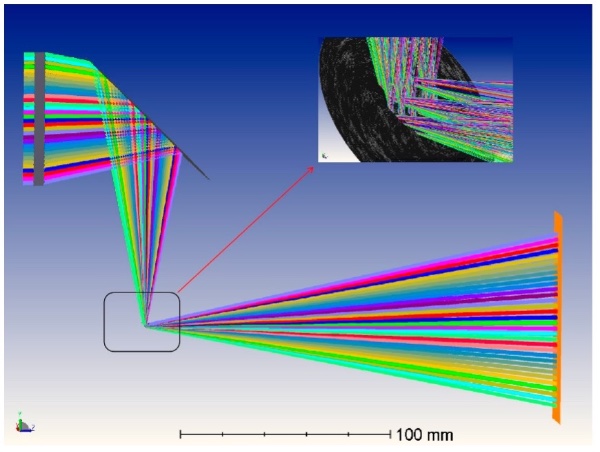
图5 大角度扫描光学系统的光路图
菲涅尔棱镜的三维结构如图6所示。通过对不同子单元的倾角进行设计,实现了对激光束阵列的精确操控。
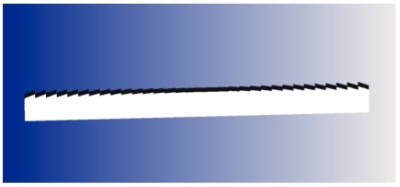
图6 菲涅尔棱镜的三维结构
为了验证设计的正确性,研究人员制造了一个简化版的菲涅尔棱镜,并将其与红色和绿色激光配合使用。激光束经过棱镜偏转后射向MEMS微镜,并在其表面被反射和扫描。实验设置如图7所示,扫描结果如图8所示。图中可以看到红色和绿色激光束实现了交替扫描,从而提高了系统的空间分辨率。图9展示了反射镜阵列与菲涅尔棱镜的三维模型。
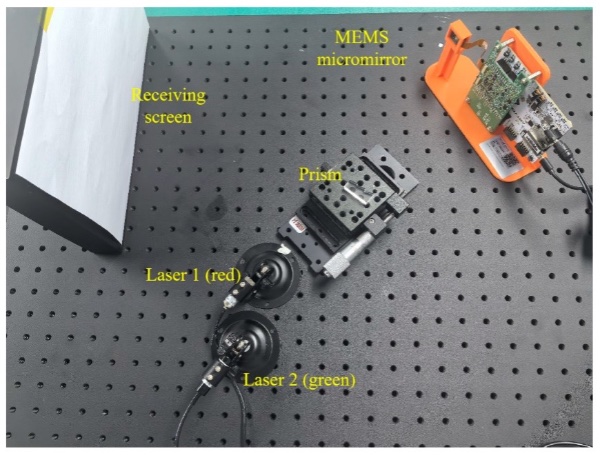
图7 实验设置
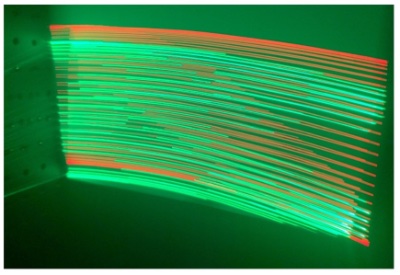
图8 扫描结果
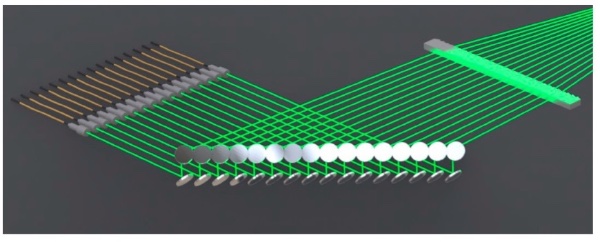
图9 反射镜阵列与菲涅尔棱镜的三维模型
综上所述,为解决MEMS微镜扫描角度较小以及现有配套光学系统无法同时兼顾扫描角度和空间分辨率的局限性,这项研究提出了一种基于反射镜阵列与菲涅尔棱镜的MEMS激光雷达发射光学系统,仅使用单个MEMS微镜,实现了大扫描角度与高空间分辨率。此外,本研究提出的系统可以与研究团队先前提出的大视场接收光学系统结合使用,如图10所示。
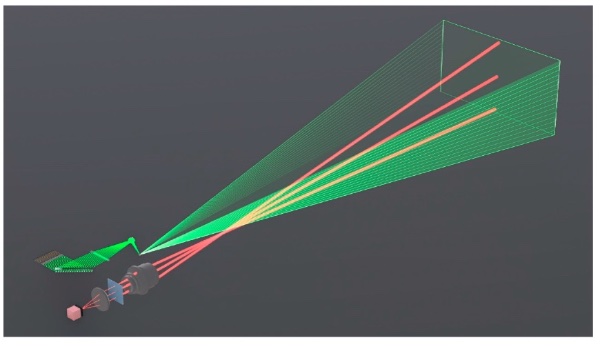
图10 大视场、高分辨率MEMS激光雷达的扫描系统与接收系统
系统中的反射镜阵列用于将稀疏的激光束阵列转换为紧凑阵列,克服了机械结构导致的光束间隙问题。本研究还分析了激光束发散角与空间分辨率之间的关系,确定了具有最高光束空间填充率的扫描方案,并实现了系统的最高探测效率。在此基础上,研究人员设计了菲涅尔棱镜,并利用单个MEMS微镜实现了阵列激光束的大角度扫描。在保证高空间分辨率的同时,系统实现了目标区域的大角度覆盖,其扫描范围达到120° × 60°,空间分辨率为0.05° × 0.25°,光束填充率高达90.63%。未来,研究人员将进一步利用激光阵列芯片和超构透镜(meta-lens)对其进行优化,以持续提升激光雷达系统的性能参数。
论文链接:https://doi.org/10.3390/photonics12090840
延伸阅读: