综述:静电-电容式MEMS力传感器最新研究进展
2026-05-10 11:16:23 来源:麦姆斯咨询 评论:0 点击:
本文重点梳理了近年来关于静电-电容式MEMS力传感器的最新研究进展,涵盖开环与闭环两种工作模式。文中详细讨论了这两种模式的工作原理,并分析了各自的优缺点,同时从分辨率、灵敏度以及测量范围等关键性能指标出发,对当前先进水平的力传感器进行了对比分析。
MEMS力传感器被广泛应用于各类技术领域,涵盖了从工业和机器人、医疗器械到消费电子及生物科学的诸多范畴,研究人员已在不同换能原理、传感材料以及创新机械结构设计方面投入了大量精力进行研究与开发。其中,静电-电容式MEMS力传感器尤其适用于构建闭环系统,因为其能够在单一器件中同时实现电容检测与静电驱动,从而保持系统结构紧凑,并具备良好的集成电路(IC)兼容性。
据麦姆斯咨询报道,近期,意大利布雷西亚大学(University of Brescia)在Journal of Microelectromechanical Systems期刊上发表了题为“Electrostatic-Capacitive MEMS Force Sensors: A State-of-the-Art Review”的综述论文,重点梳理了近年来关于静电-电容式MEMS力传感器的最新研究进展,涵盖开环与闭环两种工作模式。文中详细讨论了这两种模式的工作原理,并分析了各自的优缺点,同时从分辨率、灵敏度以及测量范围等关键性能指标出发,对当前先进水平的力传感器进行了对比分析。最后,文章展望了MEMS力传感器未来的发展方向,指出了面临的挑战与机遇,旨在为新型MEMS力传感器的设计与性能提升提供参考。
MEMS在力测量领域的应用推动了多个场景下的技术进步。不同研究领域中MEMS力传感器的应用示例如图1所示。
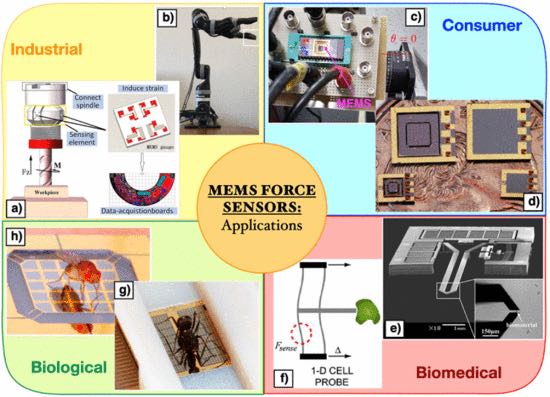
图1 MEMS力传感器的应用示例
MEMS力传感器的换能原理
文中总结了MEMS尺度下机械力传感中最常采用的换能原理:压阻式、光学式、电感式、电容式、电化学式、压电式、电磁式以及磁致伸缩式,并结合文献中的示例进行了说明。
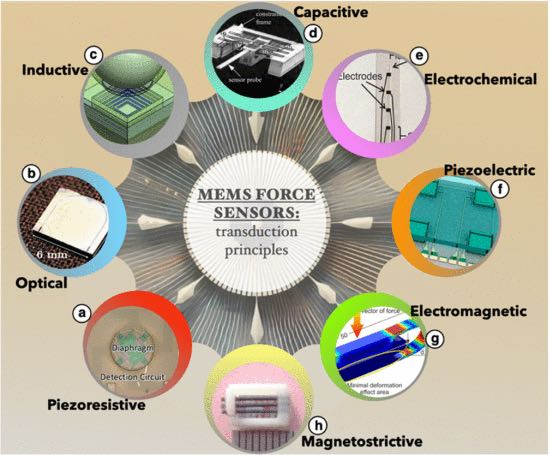
图2 MEMS力传感器中常用的换能原理
无论采用何种换能原理,MEMS力传感器通常都依赖于一个可移动或可变形的机械结构,在外力作用下,该结构会产生可测量的位移或挠度。对MEMS力传感器性能的提升不仅可以通过测量该可动结构的位移来实现,还可以通过对其进行驱动,从而构建闭环工作模式。在这一背景下,静电-电容式MEMS力传感器可在同一器件中同时利用电容检测与静电驱动。电容信号可通过标准电子电路(例如振荡器或电容电桥)直接测量与调控,无需复杂的信号转换系统,从而简化了闭环系统的设计并降低了成本。此外,在电容式MEMS力传感器中,用于电容测量的电极也可用于产生静电力,这一特点有效避免了额外驱动器的需求,使系统结构更加紧凑,并具有良好的集成电路兼容性。
基于此,文中重点讨论了静电-电容式MEMS力传感器,并对文献中已有的开环与闭环配置的性能进行对比分析。
静电-电容式MEMS力传感器
如前所述,静电-电容式MEMS力传感器能够在同一器件中同时实现电容检测与静电驱动。电容检测通常通过建立两个电极之间电容变化与外力Fₑₓₜ之间的关系来实现,其中外力通常作用于一个可移动或可变形的导电机械结构,该结构同时作为其中一个电极。
通常,基于平行板电容结构的MEMS力传感器利用电容面积或电极板间距对外力Fₑₓₜ的依赖关系进行工作,从而形成可变间隙电容或可变面积电容结构。
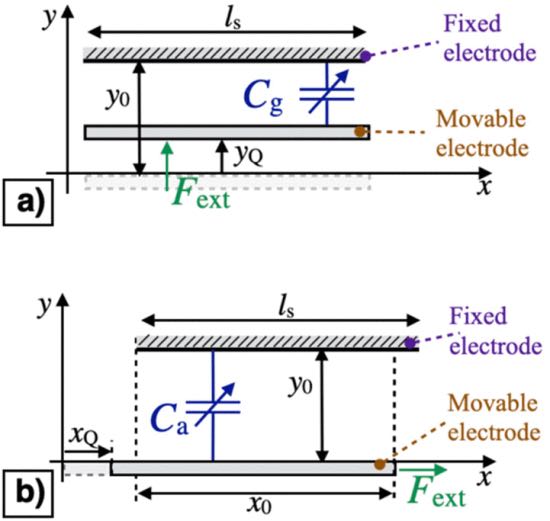
图3 可变间隙(a)与可变面积(b)平行板电容式传感器示意图
MEMS力传感器中的静电驱动通常依赖于在电容器两电极之间施加电压所产生的静电力Fd来实现。图4a展示了平行板可变间隙静电驱动器的示意图,其采用了与图3a相同的几何参数和约束条件。而图4b展示了平行板可变面积静电驱动器的示意图,其采用了与图3b相同的约束条件和几何参数。
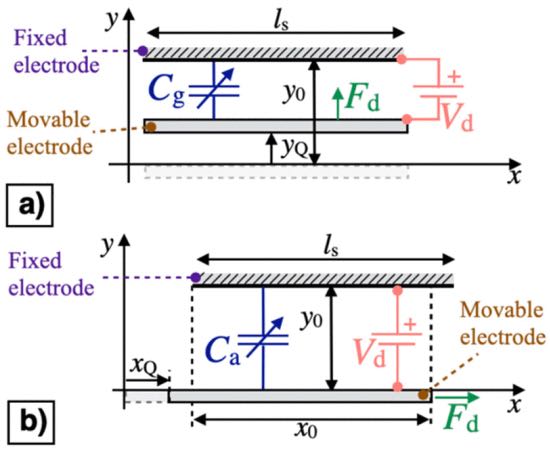
图4 可变间隙(a)与可变面积(b)平行板静电驱动器示意图
A. 开环配置
图5给出了采用开环配置的MEMS力传感器示意图。在该配置中,输出为电信号,通常表现为电压Vₒᵤₜ,其是输入机械信号(即外力Fₑₓₜ)的函数。在最简单形式下,开环系统包含一个力-电容转换单元(FCC)以及一个电容-电压转换器(CVC),用于将机械域中的Fₑₓₜ转换为电学域中的Vₒᵤₜ。图6展示了采用开环配置的电容式MEMS力传感器示例。
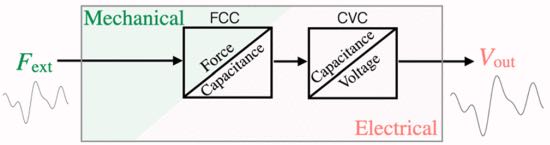
图5 基于开环配置的MEMS力传感器框图
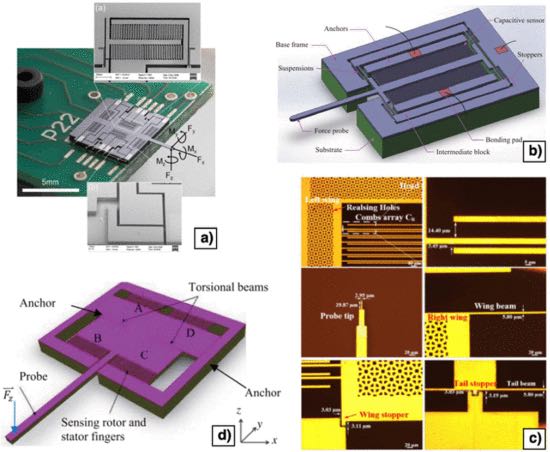
图6 采用开环配置的静电-电容式MEMS力传感器示例
B. 闭环配置
图7给出了采用闭环配置的MEMS力传感器示意图。与前面描述的开环配置类似,闭环配置同样能够获得电输出信号Vₒᵤₜ,其为机械输入信号Fₑₓₜ的函数。然而,闭环配置通过力反馈控制来抵消器件中可动质量块的机械位移,从而无需依赖位移即可实现力的直接换能。通常,闭环系统同样包含力-电容转换单元(FCC)和电容-电压转换器(CVC),用于将机械域中的Fₑₓₜ转换为电学域中的Vₒᵤₜ。随后,该电信号通过负反馈机制输入至电压-力转换单元(VFC),在机械域中产生一个与Fₑₓₜ相平衡的反馈力,从而抵消位移并提供在理想情况下无限大的输入机械阻抗。图8展示了采用闭环配置的静电-电容式MEMS力传感器示例。
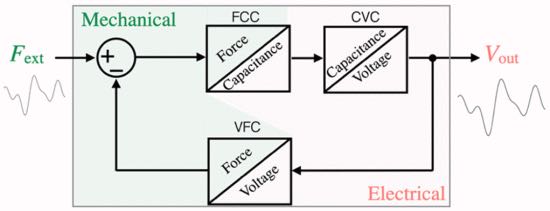
图7 基于闭环配置的典型MEMS力传感器框图
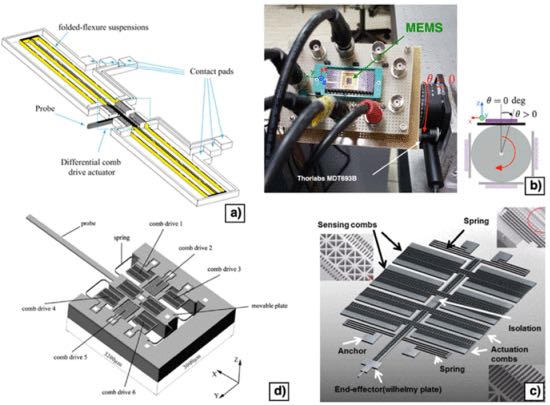
图8 基于闭环配置的静电-电容式MEMS力传感器示例
C. 开环与闭环配置的比较
开环与闭环这两种配置均适用于MEMS力传感器的实现。然而,根据具体应用需求的不同,两种配置在灵敏度、带宽、线性度、功耗以及系统整体稳定性等方面各有优劣。
开环配置通常存在若干缺点,例如测量力范围和灵敏度对机械参数(例如弹簧刚度)的依赖性较强。具体而言,在大变形情况下,弹簧刚度可能随位置发生变化,从而引入非线性和系统不稳定性。然而,由于开环配置不需要力反馈控制系统,其传感器设计通常更加简单,也更容易实现。此外,由于不存在反馈延迟,开环传感器在某些情况下能够对力变化表现出更快的响应速度,这对于高速应用具有一定优势。
相比之下,闭环配置能够有效克服开环结构的一些缺点,可提供更加精确和可靠的测量,同时降低非线性并提高测量精度。采用闭环配置后,系统对机械振动等扰动具有更强的鲁棒性,并能够以更高的分辨率和稳定性测量动态及大幅值力信号。然而,这种在稳定性、测量范围和分辨率方面的性能提升,是以更高的控制系统复杂度、更大的功耗以及更大的系统尺寸为代价的。
结论
本文对静电-电容式MEMS力传感器的最新研究进展进行了系统而全面的综述。重点对静电-电容式MEMS力传感器进行了深入分析,这类传感器的优势在于无需复杂的传感结构或苛刻的驱动系统即可实现闭环配置。文中详细分析了开环与闭环两种工作模式的基本原理,并结合文献示例进行了说明。开环配置更容易受到非线性、测量误差以及“吸合失稳(pull-in instabilities)”的影响,但具有成本低、功耗小以及尺寸紧凑的优势;相比之下,闭环配置对机械振动更具鲁棒性,并能够提供更高的测量精度,但代价是系统复杂度更高、功耗增加、体积更大,并且在标定过程中需要对反馈回路进行精确调谐。展望未来,静电-电容式MEMS力传感器有望在更广泛的应用场景中实现功能拓展。
论文信息:DOI: 10.1109/JMEMS.2025.3641973
延伸阅读:
《安费诺NovaSensor压力传感器芯片P883产品分析》
上一篇:综述:消色差超构透镜的原理与应用
下一篇:最后一页