超精密运动传感应用的量子原子干涉仪
2022-01-01 21:24:05 来源:麦姆斯咨询 评论:0 点击:
便携式传感设备通常基于最新的MEMS技术,我们可以用一个汉堡的价格买到MEMS器件。不过,如果应用需要达到更高的精确度,那就需要量子原子干涉仪。

当前最新的嵌入式运动传感通常基于MEMS技术。这些微加工的“奇迹”采用微小的硅结构,测量三维空间的加速度及旋转角速度。通过计算这些累积加速度和旋转角速度,能够在没有任何外部航路点的情况下找准方向并跟踪运动。这是航位推算技术的基础。
那么,我们为什么需要航位推算呢?地面GPS等定位系统通常已经足够精确,但在水下和地下GPS常常无法工作。即使在室内也会对GPS信号强度产生显著影响,因此,在某些应用中,我们需要其它方案。
现在,便携式传感设备通常基于最新的MEMS技术,我们可以用一个汉堡的价格买到MEMS器件。不过,如果应用需要达到更高的精确度,那就需要量子原子干涉仪。量子原子干涉仪是什么,它们能否足够小型化以变得实用?在此之前,让我们先了解一下MEMS。
传感器融合
给定初始位置和三维空间中的累积加速度,可以在短时间内跟踪位置。根据剑桥大学多年前出具的一份关于惯性导航系统的报告,利用MEMS惯性跟踪系统,位置误差在不到一分钟的时间内可能超过150米,因为误差不会平均,而是累积的。
当然,我们可以通过将其它传感器的测量数据融合到导航模型中改进性能,例如,磁力计和高度计。根据剑桥大学的报告,仅添加磁力计数据就可以将150米的误差减少到5米。尽管这项研究已经有几年的历史了,但由于MEMS技术没有突破性改进,其研究结果仍有参考意义。
MEMS惯性导航的实际应用如何?博世(Bosch)提供了成功范例,BNO055便是一款实现复杂多传感器融合的代表性MEMS器件。
所有这些测量都会出现误差,具有某些特定的统计分布。降低误差的一种常用技术是卡尔曼滤波,惯性导航系统正大量应用。卡尔曼滤波器能够更好地理解模型中的未知状态,随着时间的推移进行自我修正,对系统状态进行最优估算。
结果希望是更好的位置修正,和当前准确的指向。不过,我们仍然无法摆脱长期误差,只要时间够长,它们仍然会累积。目前的研究似乎表明,最好的情况是误差约为总行驶距离的5%。从长远来看,亚米级惯性导航是我们的目标,但目前还没有实现。
MEMS传感器,误差源
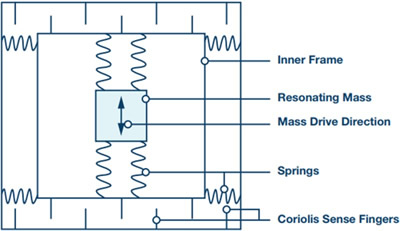
MEMS陀螺仪利用隔离框架内的振荡质量块
MEMS陀螺仪是一种动态器件,内部包括一个微小的振动结构,通过利用科里奥利效应检测角转速。与振动方向正交的机械位移被感应为电容的微小变化。
陀螺仪通常表现出两种主要的误差:速率偏差和角度随机游走误差,后者是由信号链电子器件中的热机械白噪声和闪烁噪声引起的。随机游走误差随时间增长,这是造成整体绝对方向误差的主要原因。速率偏差可以长期测量,并在很大程度上被抵消。还有一些其它所谓的校准效应会影响稳定性,也会造成难以补偿的误差项。
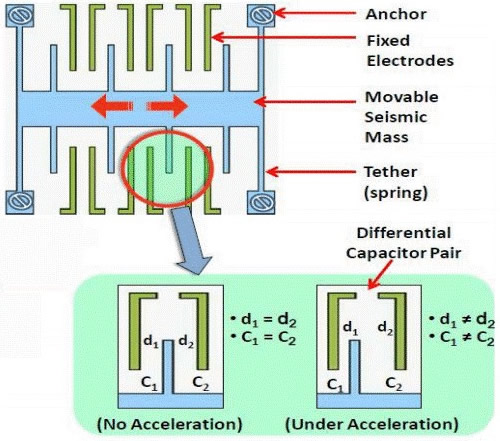
MEMS加速度计结构简单的多
相比陀螺仪,MEMS加速度计具有更静态的结构,其本质上包含一个弹簧元件,由于加速度而在一个轴上偏转。这种机械位移也可以通过微小的电容变化来测量。同样,MEMS加速度计也存在两个相同的主要误差:加速度偏置误差和速度随机游走误差。偏置误差更复杂一些,因为在这个星球上我们有重力,为了抵消偏置误差,我们需要知道传感器的方向。
得益于多传感器融合系统,可以测量方向并补偿偏差。速度随机游走误差同样是由于热机械白噪声引起的,并随时间累积。此外,和陀螺仪一样,还有其它误差因素会增加问题。
用于惯性导航系统的其它传感器也都有其自身的误差源,增加了问题的复杂性。例如,环形激光陀螺仪等光学陀螺仪,以及其它更高深的器件。不过,它们不一定容易小型化。例如,由于最大光路长度的限制,环形激光陀螺越小,精度越低。这就是为什么目前针对这类传感的研究采用了一种非常不同的方案,即原子干涉仪。
原子干涉
早在1924年,法国物理学家Louis de Broglie就提出实物粒子也有波粒二象性,波长等于普朗克常数除以动量。这意味着,就像光波一样,物质波可以衍射并产生干涉。在这种情况下,物质波可以用激光操纵,但与光波不同,原子很大,重力会产生影响。
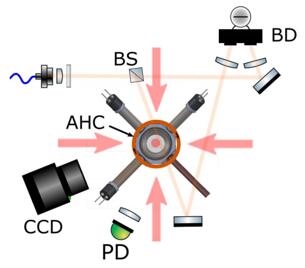
3对正交激光束和1对反亥姆霍兹(anti-Helmholtz)线圈构成磁光阱
大部分原子干涉仪实验架构类似,它们都依赖一个高真空压力容器,并利用磁光阱来冷却并减速某些来源产生的铷原子流。该装置利用3对正交圆偏振激光束,瞄准装置的中心,顶部和底部各有一对反亥姆霍兹线圈。
亥姆霍兹线圈使用一对线圈产生均匀磁场,电流沿同一方向流动。反亥姆霍兹线圈简单地翻转其中一个线圈,以产生磁场梯度,中心为磁场零位。这正是我们囚禁冷原子所需要的。
来自激光器的光子给原子提供动量,由于塞曼效应,特殊形状的磁场确保原子被推向陷阱中心的光学零点。陷阱中心的原子速度慢得足以将温度降至数微开尔文。用近共振激光将冷原子团导引,沿着真空系统横向飞行形成冷原子束,采用光抽运技术将原子云制备到初始态。
在原子干涉区域,采用3对拉曼光脉冲序列进行相干操作,通过检测原子内部态的布居数分布,观察原子干涉图样。通过解码这种模式,可以推算出精度难以置信的角速度和加速度,这将在地球及其它环境开辟新的应用。
实用性
然而,如果不能缩小它的尺寸,使其更可靠更经济的从实验室走出来,那么对于导航设备应用来说,所有这些卓越特性都完全没有意义。但是,说起来容易,以原子陀螺仪的要求为例,它需要一个带有光学纯窗口的压力容器,通常是蓝宝石,以保持低于10⁻⁷托(torr)的压力。
此外,还需要激光器,以及相关的滤波器和控制电路。所有这些东西都可以微型化,甚至可以缩小到芯片大小,但保持真空是一个巨大的挑战。通常如此低真空的压力需要使用涡轮分子泵,结合离子泵。事实证明,将这些设备缩小难度很大。
被动抽真空封装
现在,美国桑迪亚国家实验室和俄克拉何马大学的研究小组开发了一种技术,能够不需要涡轮泵、离子泵或其它真空泵,实现惯性制导原子陀螺仪应用所需要的超高真空(UHV)。
当然,不需要真空泵的说法可能不够严谨。因为,首先他们还是要将真空度达到所需要的水平,并且需要相关的标准处理技术。但是,一旦达到初始条件,压力容器就可以永久密封,真空泵也可以拆除。
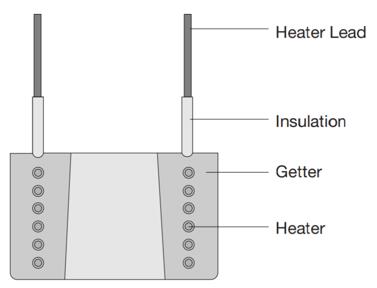
其系统依赖于烧结多孔吸气剂的化学吸附,这是一种非蒸发吸气剂(NEG)。这些简单的无源器件由锆粉和其它材料的烧结多孔结构形成,包裹在电加热元件周围。制造过程中,它们暴露于空气中,形成钝化涂层保护其免受污染。安装进真空腔室以后,吸气剂通过在抽真空过程中加热而激活。
该过程可将钝化层扩散到结构的主体中,提供活化表面,以在抽真空期间和密封封装之后吸附所有污染物。吸气剂在许多家用真空装置中很常见,例如白炽灯泡、无线电真空管等。当然,这里采用的吸气剂要比家用电器的吸气剂更专业,能够在更长的时间内捕捉更多的原子。
其重点是为器件中那一小撮超冷铷原子提供纯净的环境。这种吸气剂对于捕捉“流氓”原子、保持纯度是非常重要的。
脱气对于超高真空设备是一个问题。外壳结构中的污染气体扩散到压力容器中,会污染真空。另一个相关问题是来自容器外部的渗透。NEG是基于化学原理工作的,因此从外壳外部扩散到真空中的氦不会与吸气剂发生反应,会污染真空。
通过材料选择,这两个问题都可以最小化。框架由氢含量低的纯钛制成,窗口由蓝宝石制成,显然没有可测量的氦渗透性。这两种材料具有紧密匹配的热膨胀系数,有助于保持真空密封,并在温度下降时减少结构上的应力。
研究小组发现,这种“被动抽真空”封装抽真空并密封后,可以将10⁻⁹托的真空压力维持200天以上。这意味着如果所有其他组件都能成功微型化,就能够制造出第一颗小型便携式磁光阱,基于其的原子干涉仪便能够用于惯性制导应用。
当然,该应用本质上是一个加速度计,它可以用作超灵敏重力仪,用于石油和矿产勘探等领域的地面测量及地质研究。
延伸阅读:
上一篇:灵感源自蜘蛛网的超灵敏、抗噪声MEMS振动传感器
下一篇:面向太空电子测试应用,Silicon Designs推出战术级MEMS加速度计
经典文章回顾
- MEMS神经网络:以零电路和低功耗同时执行传感和计算任务
- 楼氏发布其首款数字语音振动传感器,用于TWS耳机的高保真语音拾取
- 基于气溶胶沉积的压电MEMS加速度计,实现高灵敏度、低噪声检测
- ADI MEMS惯性传感器助力远景能源构筑智能风机安全之基
- TDK Tronics推出两款高性能数字MEMS加速度计,提供高分辨率和强抗振性
- 高灵敏、宽带宽、低噪声聚合物压电加速度计,用于有机电子和可穿戴微系统
- PCB推出适合高温应用的三轴电荷输出加速度计
- 一种单片集成高性能三轴MEMS加速度计具有位置无关的纯轴向应力压阻梁
- 松下汽车类6轴单芯片MEMS惯性传感器,提高车载系统的安全性和舒适性
- Silicon Sensing双轴MEMS加速度计应用于“在轨制造演示”卫星