激光雷达仿真的高保真光学极端情况分析
2021-07-10 17:20:23 来源:麦姆斯咨询 评论:0 点击:
每个光源脉冲投射的光线数量可以从数百到数十亿不等,并且反射的路径没有限制。这种蒙特卡罗模拟方法可使SPEOS在模拟中捕获多种激光雷达极端情况,包括挡风玻璃对激光雷达的影响、高镜面物体引起的鬼影、雾和雨等光漫反射介质中的传播、空间光束强度分布的影响等。
了解激光雷达的局限性,才能提高安全性和优化设计。
据麦姆斯咨询介绍,高级驾驶辅助系统(ADAS)和自动驾驶汽车(AV)主要依赖四种传感器:雷达、摄像头、超声波传感器以及新兴的激光雷达(激光探测和测距)。激光雷达是ADAS工具箱的关键传感器,因为它可以在各种环境、不同照明条件下精确测量从汽车、交通灯到行人等所有物体的三维图像(点云)。
稳健可靠的探测对ADAS来讲至关重要。然而,每种传感器技术在特定条件下都可能导致错误探测的发生。特别在安全方面,了解这些局限性因素尤为重要。这与激光雷达一样:极端情况探测时有发生。激光雷达的高保真模拟,可通过深入了解极端情况来优化激光雷达设计,从而在许多方面提供帮助。生成具有所有真实测量特征的代表性模拟数据,同时可进行虚拟基准测试和封装分析。
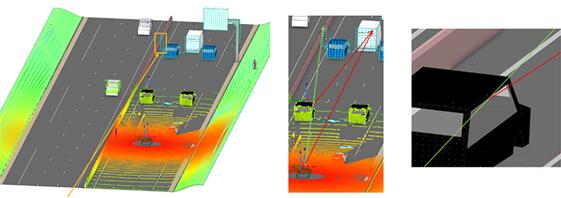
图1:因车辆挡风玻璃镜面反射导致的卡车鬼像模拟示意图
在模拟中为了恰当地捕获激光雷达此类极端情况,包括由于场景或光束中镜面物体引起的鬼影反射,或由于光源的空间发散而探测到的近距离物体,每个脉冲光源均需考虑以下两点:
1、根据光源的空间强度分布,需要在模拟场景中投射多条光线路径。
2、需要捕捉沿光线路径的多次反射。
大多数激光雷达模拟软件仅限于在每个光源发射的场景,投射一条光线或仅几条光线,并且不考虑沿路径的多次反射。这不足以捕获上述极端情况。此外,仿真软件应在完全的3D环境中,使用属性明确的材料,使工程师能够如实地再现各种极端情况的场景。
高保真蒙特卡罗(Monte Carlo)光学激光雷达仿真需求
不受光线投射或反射限制的仿真工具,可用于对大多数极端情况进行物理建模,并在雾、雨等条件下进行合适的天气建模。此种情况下,每条光线路径需要数百次反射,才能正确模拟这些漫反射介质对物体飞行时间(ToF)信号的影响。
光学软件Ansys SPEOS不局限于光线投射或反射。每个光源脉冲投射的光线数量可以从数百到数十亿不等,并且反射的路径没有限制。这种蒙特卡罗模拟方法可使SPEOS在模拟中捕获多种激光雷达极端情况,包括挡风玻璃对激光雷达的影响、高镜面物体引起的鬼影、雾和雨等光漫反射介质中的传播、空间光束强度分布的影响等。
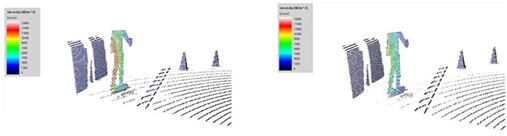
图2:由于挡风玻璃的菲涅耳反射(Fresnel Reflection),模拟光的反射强度下降(左图:没有挡风玻璃,右图:有挡风玻璃)
SPEOS利用完全的3D环境进行仿真,使工程师能够将目标车辆的几何形状和目标物体的材料属性考虑在内。
延伸阅读:
《传感应用的VCSEL技术及市场-2021版》
上一篇:防汗“智能皮肤”问世,举铁、吃火锅……统统不是问题
下一篇:经挡风玻璃实现雨中探测距离1000米,AEye树立激光雷达性能新标杆!