短距离激光雷达的机遇和挑战
2021-09-19 04:21:05 来源:麦姆斯咨询 评论:0 点击:
探测范围2米和200米的激光雷达,其价值和应用同样诱人,它们发射主动光束,穿透复杂的环境光到达物体表面,然后将准确的距离数据附加到场景中的每一个点。这种性能可以帮助应用避免灾难性错误,大大降低软件的计算量,将像素转化为可识别物体或场景的精确3D地图。
麦姆斯咨询 编译
谈及激光雷达(LiDAR),大部分人都会首先想到远距离应用,例如航空测绘,或是自动驾驶测试车辆顶部的全家桶或大黑盒。但是,激光雷达最激动人心的用例可能还在于小尺寸和10~20米左右的短距离应用,它革命性地改变了无人机地面测绘和AGV车辆导航,带来了丰富的新用途。
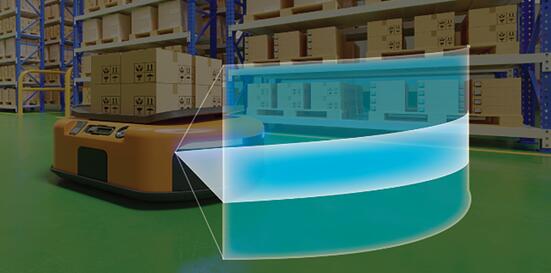
小尺寸、低功耗的短距离激光雷达模块可以在机器人和AGV车辆周围形成一个环境可视化的安全屏障,以提高安全性并实现自动导航、避障、泊车等新功能。
探测范围2米和200米的激光雷达,其价值和应用同样诱人,它们发射主动光束,穿透复杂的环境光到达物体表面,然后将准确的距离数据附加到场景中的每一个点。这种性能可以帮助应用避免灾难性错误,大大降低软件的计算量,将像素转化为可识别物体或场景的精确3D地图。
小尺寸、低功耗的短距离激光雷达可以增强系统的主动安全性,改善工业机械、机器人和无人机的测绘和导航。如果尺寸足够小,它们还可以大幅改善智能手机的增强现实(AR)应用。
探测距离、尺寸、功率

Lumotive基于高度可扩展的光束控制超表面(LCM™)技术,打造了从智能手机,到机器人、无人机、AGV以及工业应用,并一直扩展到自动驾驶高性能远距离应用的激光雷达。
显然,上述小型系统可以极大的受益于激光雷达的环境感知性能,但它们无法承受目前大尺寸、远距离激光雷达的尺寸、重量、功耗以及成本。所幸,这四个因素都可以通过大幅缩小激光雷达的工作范围来改善,因为它们并不需要自动驾驶所要求的250米探测距离。
对于高级驾驶辅助系统(ADAS)或工业/机器人应用,将探测距离缩小到20米,就可以采用低功率激光器、更经济的光学元件和仅为高尔夫球大小的封装尺寸。再缩小一点,甚至可以获得尺寸和功耗都与智能手机摄像头模块相当的激光雷达。不过,这些都需要基于非常关键且极具挑战的技术改进,那就是去除操纵激光束的运动反射镜,以及其相关的影响小型化的轴承、定位器等组件。

面向智能手机和AR应用的Lumotive U30,探测距离10米
去除运动反射镜
去除运动反射镜子系统是可行的,最简单的方案被称为Flash照明。类似照相机闪光灯一样,Flash激光雷达用单次脉冲照亮整个视场。然后通过镜头将场景图像聚焦在2D飞行时间(ToF)传感器上,传感器中的每个像素记录Flash脉冲和场景反射光之间的相位差。根据这些相位差,系统可以确定从激光雷达单元到视场中每个点的距离。
这种系统机械简单,但面临着严峻的技术挑战。Flash脉冲的能量分布在整个视场中,因此任何一点反射脉冲的能量都很低,很容易在强烈的环境光中丢失。例如,在明亮的阳光下,需要非常强大的Flash脉冲才能让传感器检测到数据。这就是为什么微软Kinect中的Flash激光雷达在光线昏暗的室内工作良好,但在日光下的户外基本上就“盲”了。
环境光的影响还不是唯一的挑战。例如,多路径问题,当脉冲从激光雷达到场景中的某个点再返回到传感器时的路径不止一条时,会导致虚假的距离测量,从而扭曲物体的形状和距离。对于具有多反射表面的场景,这种伪影问题尤其突出。另外,还有干扰问题,当多个激光雷达装置在同一区域工作时,例如多个机器人运行的仓库或多人游戏中,由于信号干扰也可能导致不准确的距离读出。
改良Flash方案
这难不倒工程师的智慧。例如,苹果工程师改进了iPhone 12 Pro的Flash方案,在Flash单元前面添加了一个光学元件,使垂直腔面发射激光器(VCSEL)发出的光不是泛光,而是在视场中均匀分布的24 x 24光束阵列。由此可以将更多的能量照射到场景中的每个点,从而克服环境光影响,使系统能够在室外正常工作。
当然,这种离散光束阵列也是有助于改善但不能完全消除多路径和干扰问题。在这种架构下,有限数量的光束(24 x 24)生成了分辨率较低的深度图像。这种分辨率可能会扭曲不规则物体的形状,并可能完全丢失尺寸较小的物体,即使它们对应用至关重要。
固态光束扫描
采用运动反射镜的激光雷达系统通过将所有VCSEL能量集中在单个光束中,来克服环境光和其它Flash方案的问题,不过,它们很难将尺寸做得非常小。而Flash方案可以缩减到小尺寸和低功耗,但它们难以解决环境光、分辨率以及其它精度问题。相比之下,采用传统液晶技术的物理光学应用可以帮助我们摆脱上述困境,其核心是一种固态器件——一种无需运动组件的光束控制CMOS芯片。
这种架构的核心是Lumotive称之为液晶超表面(LCM)的芯片。设想一颗小型CMOS集成电路,上面覆盖着一层非常薄的微型液晶单元阵列,这些液晶单元小到能够以1/4波长的间距隔开。在这种尺寸下,液晶单元可以像巨大的微型光学天线阵列一样,根据施加到液晶单元上电压信号确定的角度反射入射光束。通过这种方式,固定的LCM芯片能够通过软件控制在视场中扫描光束。
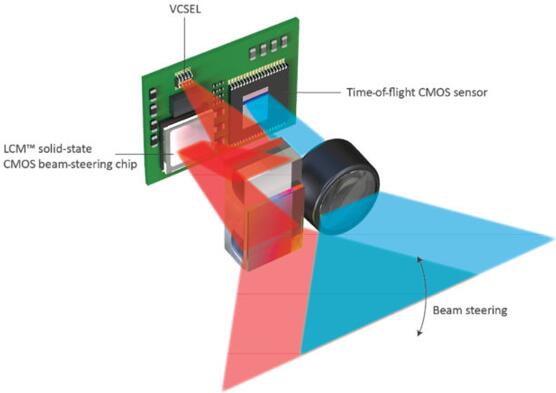
在Lumotive激光雷达模块中,LCM芯片通过耦合棱镜利用VCSEL阵列的反射光(以红色显示)扫描视场。场景反射光(以蓝色显示)再通过透镜聚焦到一颗飞行时间(ToF)传感器上。通过将视场中的行照明与来自ToF传感器的行读出同步,系统可以通过类似卷帘快门的过程,高效创建场景的高性能3D图像。
这种方案具有显著的优势。由于视场中的每个点都能从VCSEL行照明中获得相对很高的能量,因此相比Flash方案需要的激光功率,LCM激光雷达方案可以将激光器的功率降低约10倍,或者LCM激光雷达可以在相同环境光照条件下提供两到三倍的有效探测距离。这种情况下,系统的分辨率主要由ToF传感器而非照明限制,能够为场景中的表面提供更精确的形状测绘,并成功捕捉尺寸更小的物体。
由于在任何时刻都只有一条VCSEL行照明视场,因此显著减少了多路径和干扰问题。另一个关键优势是,由于LCM光束转向没有任何机械惯性,因此光束可以在整个视场中由软件控制以任何顺序转向。例如,可以从对整个视场的均匀扫描切换到对有限区域的更窄、更快的扫描,以收集感兴趣区域的更丰富数据。
同样重要的是,从系统供应商的角度来看,LCM激光雷达方案所使用的材料和工艺已经很成熟,事实上,所有基础技术都已经在智能手机中有应用。因此,Lumotive可以将激光雷达缩小到高尔夫球大小,甚至小到智能手机摄像头模组的尺寸。
业界已经注意到,小尺寸、低功耗的经济型激光雷达有望为充满前景的应用开辟新机遇。然而,包含运动组件的反射镜光束控制方案很难微型化,去除运动反射镜的Flash方案又面临着巨大的性能挑战。Lumotive基于其专有的固态光束控制LCM芯片,提供了一种可扩展的激光雷达架构,打破了上述困境,为很多潜在应用打开了大门。
作者简介:

Lumotive联合创始人、首席技术官Gleb Akselrod
Gleb Akselrod在光子学和光电子领域拥有超过10年的经验。在加入Lumotive之前,他曾担任华盛顿Bellevue Intelligent Ventures的光学技术总监,在那里他领导了一个光学超材料和纳米光子技术商业化项目。他于2013年在麻省理工学院获得博士学位,后在杜克大学超材料和集成等离子体电子中心做博士后研究,当时的研究方向是等离子体纳米天线和超表面。
Lumotive成立于2018年,是全硅固态激光雷达系统的领导者,致力于为消费电子、工业自动化、机器人和汽车应用开发高性能激光雷达解决方案。Lumotive基于其液晶超表面专利的革命性光束操纵技术,提供了前所未有的探测范围、分辨率及帧速率的高性能组合,并已经为大规模应用做好了准备(成本、可靠性及尺寸)。Lumotive的随机存取光束控制芯片,使业界首款软件定义激光雷达具备了寻址扫描、目标跟踪和高级感知能力。Lumotive的投资方包括比尔·盖茨基金和Quan基金。
延伸阅读:
《新兴图像传感器技术、应用及市场-2021版》
上一篇:“地球观测计划”将为地球科学带来新见解
下一篇:近视老花不用愁,AR智能眼镜可定制