基于事件的自动驾驶传感系统,有力补充激光雷达,奔驰已率先尝试
2021-01-26 09:44:49 来源:麦姆斯咨询 评论:0 点击:
基于事件的传感器由分布在车辆中的三个事件型图像传感器和一个位于中心位置的连续激光扫描仪组成,该扫描仪可以提供更密集的3D地图,大大降低了处理延时,以满足自动驾驶系统的实时响应需求。
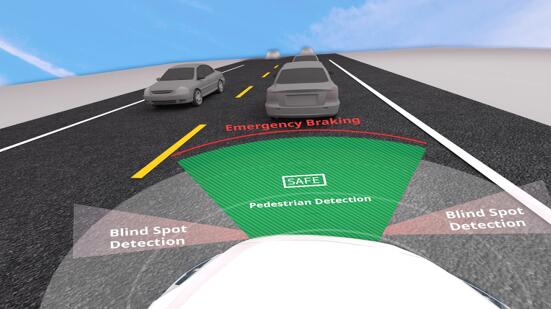
据麦姆斯咨询介绍,当前领先的自动驾驶(AV)开发商在环境感知方面,大多依赖基于帧(frame-based)的视觉传感器,例如近期火热的激光雷达(LiDAR)传感器。然而,这类技术一直在努力更快速且可靠地检测、跟踪及分类物体,以防止很多近距离的拐角碰撞,比如行人突然从停着的车辆后面出现的“鬼探头”情况。
基于帧的环境感知系统在自动驾驶的发展进程中无疑扮演着关键角色。但数据统计令人痛心,80%的撞车事故和65%的近距离撞车事故都与驾驶员在撞车前最后3秒内的注意力不集中有关,因此业界需要朝着更快、更可靠的驾驶辅助系统努力,以解决近距离有可能发生碰撞的安全问题。
基于帧的环境感知系统有它的重要作用,但在自动驾驶的舞台上,它不应该一个人独舞。基于事件(event-based)的传感器,为自动驾驶系统开发提供了一种先进的互补解决方案,在激光雷达不足的情况下为车辆提供增强的安全性能。
激光雷达有什么不足?
激光雷达是自动驾驶领域最突出的基于帧的传感技术。它采用非可见光束扫描车辆周围的物体。相对于人眼,激光雷达扫描和探测物体的速度非常快。然而,对于涉及人员生死的自动驾驶而言,采用先进感知处理算法和最先进传感技术的激光雷达系统,在30~40米以外的距离它们能够提供足够的感知性能,而对于司机最有可能撞车的30~40米以内的情况,它们的探测速度还不够快。
一般来说,汽车摄像头大约以每秒30帧(fps)的速度工作,每帧的处理延迟约为33毫秒。为了准确检测行人并预测其路径,需要多帧处理。这意味着相关系统可能需要数百毫秒才能实现有效探测,而对于一辆以60公里每小时的速度行驶的车辆来说,仅200毫秒的时间就能行驶3.4米。在人员密集的城市环境中,这样的延时会加剧事故风险。
激光雷达,以及目前基于摄像头的计算机视觉和人工智能导航系统,都受到这种基于帧的的感知速度限制,简单来说,这种基于帧的方案还是太慢了!
事实上,现在很多环境感知系统所使用的摄像头和传感器并不比苹果iPhone的标准配置强多少,而iPhone的FaceID每帧也只能产生33000个光点。如果我们想要显著降低处理延时,更可靠地支持“下游”算法处理,用于路径预测、目标分类和威胁评估等,则需要更快的传感器方案,需要一种互补、目标性能提升10倍的新型传感器系统,能够在1毫秒而不是几十毫秒内生成精确的3D深度图。
除了反应速度不够快的局限性外,激光雷达系统的成本相对来说还非常高昂。从开始的数万美元到现在的数千美元不等,这些成本往往最终还是转嫁到用户身上。此外,由于技术不断发展和更新,新的激光雷达传感器还会以新的高价推向市场。
另外,由于高级自动驾驶系统往往率先应用于高端豪华汽车,激光雷达系统装配的美学影响也是一个主要问题。因为,它们需要安装在可以无遮挡探测前方的某个位置,因此很多设计是将其安装在车顶的盒子中。这种设计对于一辆拉风的豪华轿跑车来说,很是不搭。

人眼 vs. VoxelFlow vs. iPhone
成本和美观无疑是激光雷达系统的缺点,但归根结底,根本问题是这些系统的分辨率有限,探测速度相对仍较慢,无法区分固定的灯柱和奔跑的儿童。自动驾驶系统需要能够提供更密集点云的感知系统,事实上,点云密度应该需要达到千万量级。
基于事件的传感器,驱动未来的自动驾驶
激光雷达头疼的30~40米范围,对于基于事件的传感器来说正是用武之地。Terranet公司目前正在开发的基于事件的传感技术VoxelFlow,能够凭借很低的算力,以极低的延时对动态移动物体进行分类。VoxelFlow技术每秒可以生成1000万个3D点云,远超33000个,其结果是提供没有运动模糊的快速边缘检测。基于事件的传感器的超低延时性能,能够确保车辆及时应对“鬼探头”问题,采取紧急制动、加速或绕过突然出现在车辆后方的物体以避免碰撞事故。
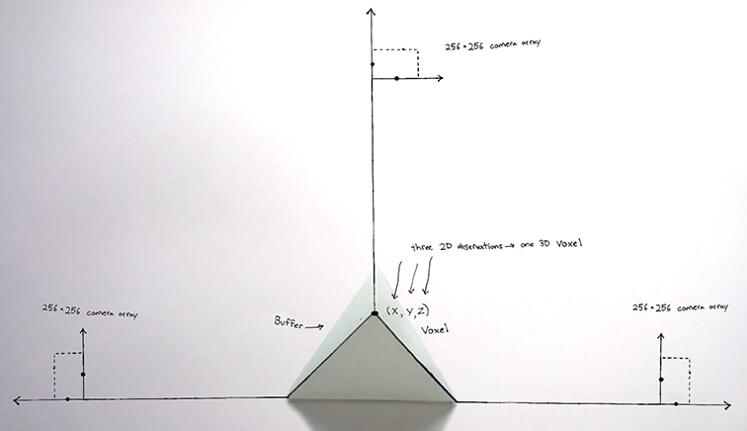
Voxelflow是一种新型的计算机视觉解决方案,它由三个基于事件的摄像头和一个激光扫描仪组成。Voxelflow用主动照明技术通过3D三角测量,创建带时间戳的点云(x、y、z)光栅图像。
基于事件的传感器将是实现下一代Level 1-3级高级驾驶辅助系统(ADAS)的关键技术,同时,驱动实现真正自主的Level 4-5级自动驾驶系统。基于事件的传感器由分布在车辆中的三个事件型图像传感器和一个位于中心位置的连续激光扫描仪组成,该扫描仪可以提供更密集的3D地图,大大降低了处理延时,以满足自动驾驶系统的实时响应需求。
基于事件的传感器系统会自动进行连续校准,以应对冲击、振动抑制模糊,同时还可以提供ADAS和自动驾驶系统所需要的角度和距离分辨率。与激光雷达系统相比,基于事件的传感器系统在大雨、大雪和大雾中的表现也更好。
激光雷达已成为自动驾驶行业标准,并且已经证明在40米以外的范围具有卓越的探测性能,当然,目前激光雷达的成本仍相对较高。基于事件的传感器可以成为激光雷达以及其他雷达和摄像头系统的良好补充。可以将来自这些传感器的原始传感器数据与基于事件的传感器的3D网格图进行有效融合,大大提高环境感知能力,从而提高车辆行驶安全性,减少碰撞几率。
Terranet斩获首笔Voxelflow原型采购订单,还是来自产业巨头“奔驰”
据麦姆斯咨询此前报道,今年1月初,Terranet宣布斩获了首笔来自汽车产业巨头戴姆勒梅赛德斯奔驰的Voxelflow原型采购订单,订单价值31000欧元。
这笔采购订单是Terranet和戴姆勒于2020年10月签署的谅解备忘录(MoU)的延续,双方的谅解备忘录涉及ADAS和防撞解决方案的原型验证、产品开发和产业化。下一步是将VoxelFlow集成到奔驰的测试车辆中。
预计明年我们就可以在车辆上看到基于事件的传感器原型。之后,还需要推动这类基于事件的传感系统产业化,并进一步缩小其尺寸,这样才能满足当今自动驾驶行业的严苛要求。毫无疑问,基于事件的传感器将很快成为自动驾驶系统的必要组成部分。
延伸阅读:
上一篇:英国研究人员展示3D成像简化方法:LED光源搭配智能手机
下一篇:从AEB出发,本土车载雷达企业行易道的产品规模化之路