斯坦福大学非视距成像“透视”技术取得突破进展
2019-08-17 16:13:40 来源:麦姆斯咨询 评论:0 点击:
据麦姆斯咨询报道,由美国斯坦福大学研究团队开发的转角相机系统,利用一种基于波的成像模型实现了非视距(NLOS)成像。这款转角相机系统基于该团队之前开发的转角相机,但能够从更多种类的表面捕获更多光线,比以前的版本看得更远。
据麦姆斯咨询报道,由美国斯坦福大学研究团队开发的转角相机系统,利用一种基于波的成像模型实现了非视距(NLOS)成像。这款转角相机系统基于该团队之前开发的转角相机,但能够从更多种类的表面捕获更多光线,比以前的版本看得更远,使其更加贴近实际应用。并且,它的响应速度足以监控视线外物体的移动。
对隐藏物体的非视距成像
为了捕捉转角外的图像,该系统使用强大的激光来扫描感兴趣场景对面的墙壁。激光从墙壁反射,射向感兴趣场景中的物体,然后反弹回墙壁,再反弹至相机传感器。当激光到达相机时,只剩下部分光斑,但其传感器能够捕捉每个光斑,然后再将它们发送至能够解译图像的高效算法。
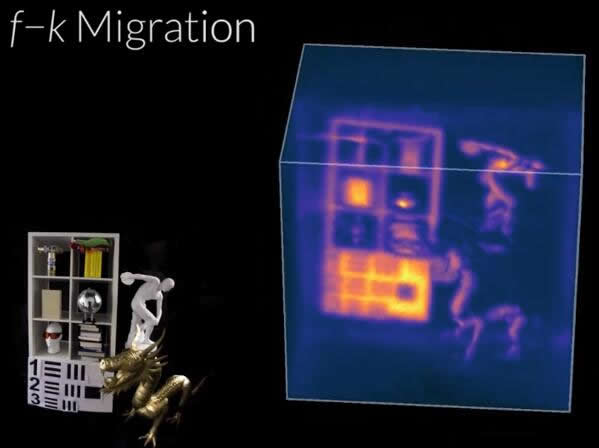
该算法也由该团队开发,它将反射光看作是从转角外隐藏物体所发出的波,类似于地震成像系统利用声波从地下层的反射以了解地表以下的情况。这种重配置算法启发自地震学中的反演方法,提高了转角相机系统对包含各种材料的大型场景的成像能力。
为了确保该系统的实用性,研究人员采用了成像类硬件,以及自动驾驶汽车视觉系统中常用的扫描和图像处理速度。
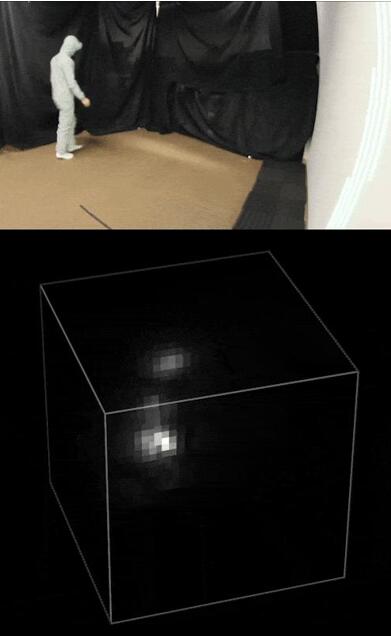
该系统可以实现每秒四帧扫描。它能够在具有图形处理单元的计算机上,以每秒60帧的速度重建场景。这种新的非视距成像系统能够在非阳光直射下捕捉房间大小的场景,并能以交互速率扫描穿反光服的人员。
研究人员希望这种“超人”视觉系统有一天可以帮助自动驾驶汽车和机器人比真人驾驶员更加安全地行驶。“目前业界讨论的是为自动驾驶汽车和机器人等应用,打造可以比拟人类的视觉系统,但我们的研究要远超人类的视觉能力,”Gordon Wetzstein教授说,“我们希望实现3D视觉,看到转角以外的环境,以及可见光以外的频段。”
能够利用非可见光实时看到转角以外的物体运动着实激动人心,但是真正应用于自动驾驶汽车或机器人的实用系统还需要进一步的改进。“目前的进展还很初级,”Wetzstein说,“目前可以观测的运动分辨率还很低,运动速度也很慢,但与我们去年最先进的成果相比,已经取得了重大进展。”
该团队希望在自动驾驶测试汽车上试验它们的系统,同时也在探寻其他可能的应用,例如透过生物组织的医学成像等。除了速度和分辨率等其他改进之外,研究人员还将致力于使他们的系统更加通用,以应对驾驶员遇到的具有挑战性的视觉条件,例如雾、雨、沙尘暴和雪等。
延伸阅读: