苹果公司利用“置信度”算法,加速自动驾驶传感器数据处理
2019-05-09 08:01:08 来源:麦姆斯咨询 评论:0 点击:
据麦姆斯咨询报道,苹果公司(Apple)自动驾驶“泰坦计划(Project Titan)”的专利显示,自动驾驶车辆可以使用一种“置信度”算法,使自动驾驶车辆仅从传感器获取满足需要的数据,从而降低障碍物识别和道路感知的数据处理量。
据麦姆斯咨询报道,苹果公司(Apple)自动驾驶“泰坦计划(Project Titan)”的专利显示,自动驾驶车辆可以使用一种“置信度”算法,使自动驾驶车辆仅从传感器获取满足需要的数据,从而降低障碍物识别和道路感知的数据处理量。
“泰坦计划”是苹果公司的自动驾驶项目,主要围绕基于车辆的计算机视觉和传输。起初,该项目被认为将开发一辆苹果品牌的汽车,但多年以后,它已经将重点转向了自动驾驶车辆系统。目前,苹果公司正在通过位于加利福尼亚的自动驾驶车队进行系统测试。

苹果公司“泰坦计划”自动驾驶汽车顶部传感器平台
目前的自动驾驶系统通常需要依赖大量的数据处理。自动驾驶车辆上安装有多种传感器,这些传感器收集的数据能够提供道路的完整视图,但是车辆不仅要理解数据,还要从中确定可能值得更多关注的物体,以及道路状况的变化,这在计算量上是非常惊人的。
解决问题的一种方法,是简单粗暴地将更多的处理能力加入系统,但由于所需硬件以及功耗的增加,这是一条成本高昂的路线。另一种方法,是使自动驾驶系统在资源紧张的情况下具有选择性,有目的地降低某些区域的资源分配,将剩余的计算能力交给更重要的部分。
在美国专利商标局本周二公布的苹果公司一件题为“深度感知传感器数据处理”的专利中,介绍了系统如何对传感器数据进行选择性处理。
车辆获取“被动式传感器”数据,然后将其与其他传感器数据进行比较以改善精度
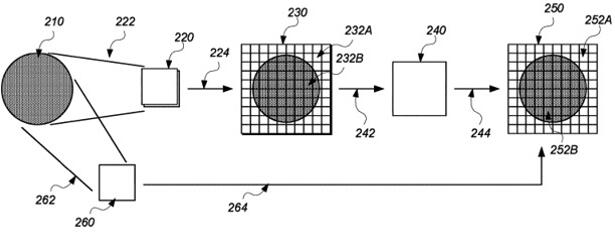
根据该专利,传感器数据处理系统从车辆传感器接收数据,并生成环境的深度数据表示。该系统能够利用摄像头等一个或多个被动式传感器,为整个环境生成整体地图,包括图像数据和深度数据,从而使系统对即时区域、初始模型有基本的理解。
然后,由一个或多个主动式传感设备,如激光雷达(LiDAR)等数据更密集的硬件,生成第二组数据,并将其与初始模型进行比较。然后,利用更多主动式传感器数据迭代调整模型,直到模型的“置信度”足够准确,以提供给自动驾驶系统的其他部件。
该专利将“置信度水平”定义为基于“每次调整迭代对算法的修正量”。简而言之,它将持续利用传感器数据调整模型,直到这种调整可以忽略不计。
这种方案可以为自动驾驶系统节省资源并降低训练成本,同时,也提供了性能优势。通过更快地为道路创建模型,使系统可以更早地识别对象和元素,从而带来响应更快且更安全的系统。
苹果公司的专利提出,还可以利用机器学习或深度学习算法,来更好地改进模型细化和对象识别过程。此外,该专利还提出,可以利用多个车辆的传感器系统,从而提供更广阔的环境监控区域,扩展车辆的有效“视野”。
尽管,苹果公司每周都会向美国专利商标局提交大量的专利申请,但并不意味着这些概念都会进入商业产品或服务,但它们确实表明了苹果公司感兴趣的研发方向。
在本周公布的苹果公司另一件传感器专利中,描述了一种使用激光雷达(LiDAR)和接近传感器自动捕捉驾驶员兴趣点的可能性,例如位置照片或环境扫描。这对于旅行者来说可能有用,可以帮助他们获取想要的路边图像,而且,它同样也可以用于捕捉事故现场,保险公司或执法部门可能会对此感兴趣。
此外,苹果公司还提出了如何使用车辆下方的传感器来监控地面相对于车辆运动的速度和角度,以提示自动驾驶系统,车辆可能在预定方向上发生了打滑。
其他相关专利,包括使用手势控制来移动车辆;使用增强现实(AR)技术在挡风玻璃上显示前方的道路;与其他自动驾驶系统的车辆间通信;以及使用iPhone或类似移动设备召唤无人驾驶出租车,并完成支付等。
延伸阅读:
上一篇:助力麦格纳4D高清雷达,首款数字片上雷达芯片破局而来
下一篇:Waymo顶级科学家回应Elon Musk,无激光雷达方案“风险很大”