Cepton激光雷达运行机理揭秘,嵌入车灯助推自动驾驶
2018-08-02 12:39:51 来源:麦姆斯咨询 评论:0 点击:
据麦姆斯咨询报道,近日,美国专利商标局公开了一件Cepton申请的关于LiDAR系统扫描装置和方法的发明专利。我们可以从中大概了解Cepton扫描装置的结构和运行机理。

图1 Cepton最新推出的车用Vista LiDAR(左)和无人机应用的SORA 200 LiDAR(右)
Cepton“微动技术”一直很神秘
从本质上来说,LiDAR(激光雷达)最擅长的就是测距。因此,自动驾驶汽车制造商通常需要将其与摄像头和毫米波雷达配合使用,以更完整地把握车辆周围环境的三维信息。
LiDAR是一种主动传感器,而不是像摄像头那样依靠环境光的被动传感器。LiDAR通过发射激光束,再接收从远处物体反射回来的光束,通过测量光束的飞行时间而获得远处物体的距离信息。不过,激光束非常窄,并且它们不会发生散射(这是重点),因此单束LiDAR脉冲只能感知一个非常小的物体。也即它可能能够在50步开外探测一枚一角硬币,但无法探测一个高大的建筑物。
因此,为了实际应用,LiDAR传感器必须进行某种形式的“扫描”。这最终成为众多LiDAR制造商之间的一个差异化因素。大多数LiDAR传感器会连接到一个旋转它们的驱动马达,一旦激光发射与电机的运动同步,我们就可以知道激光指向的位置,并将前方环境的整体成像合成在一起。因此,LiDAR的视场完全取决于电机转动它的角度。目前,很多LiDAR制造商使用反射镜或MEMS微镜来偏转激光束或投射激光束,而位于美国硅谷的3D LiDAR解决方案供应商——Cepton拥有自己称之为MMT(micro-motion微动)的专利技术。
从Cepton最新公开的美国专利,管窥其“微动技术”

图2 Cepton首席执行官裴军
Cepton首席执行官Jun Pei(裴军)一直不愿分享太多有关其微动技术如何工作的细节,只是说它有点像扬声器中的扬声器纸盆(cone)。也就是说,Cepton的LiDAR阵列会运动,但没有使用反射镜或驱动马达。因此,Cepton的LiDAR传感器避免了反射镜不可避免的光损失,同时也消除了任何可能的机械磨损。裴军表示,这是一种无摩擦的系统,它可靠、成本经济且易于制造。
据麦姆斯咨询报道,近日,美国专利商标局公开了一件Cepton申请的关于LiDAR系统扫描装置和方法的发明专利。我们可以从中大概了解Cepton扫描装置的结构和运行机理。
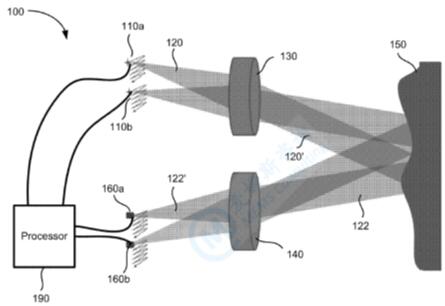
图3 Cepton用于3D成像的LiDAR传感器(100)基本结构
图3示意了3D成像LiDAR传感器(100)的基本结构。LiDAR传感器包括固定的发射透镜130和接收透镜140。以及基本上设置在发射透镜130后焦平面上的激光源110a~110b。激光源110a用于发射激光脉冲120。激光脉冲经发射透镜130准直并射向LiDAR传感器前方的物体150。
然后,从物体反射的激光脉冲122,射向接收透镜140。通过接收透镜140聚焦到相应的光电探测器160a~160b,光电探测器160a~160b基本上设置在接收透镜140的焦平面上。
最后,通过耦合到激光源110a和光电检测器160a的处理器190,确定激光脉冲120从发射到被探测的飞行时间(ToF),进而计算获得LiDAR传感器和物体之间的距离。
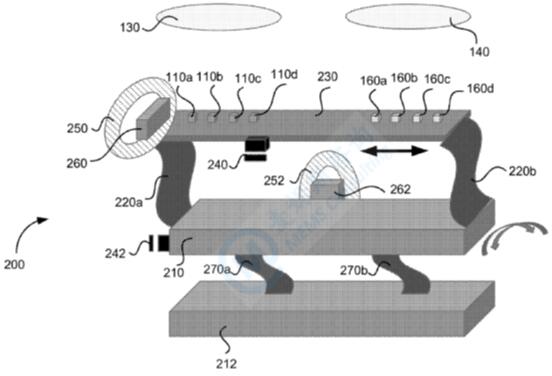
图4 用于实现LiDAR传感器二维扫描的挠曲机构(200)
图4示意了可用于图3所示LiDAR传感器中激光源(110a~110d)和光电探测器(160a~160d)二维扫描的挠曲机构(200)。如图4所示,四个激光源110a~110d和四个光电探测器160a~160d安装在同一刚性平台230上。刚性平台230通过两个挠曲元件220a和220b联接到第一基板210。挠曲元件220a和220b可以通过使用单个执行器向左或向右偏转(例如音圈250和永磁体260,或者通过压电执行器等方式)。第一基板210可以通过两个挠曲元件270a和270b联接到第二基板212。挠曲元件270a和270b可以通过使用单个执行器向前或向后偏转(例如音圈252和永磁体262,或者通过压电执行器等方式)。
因此,通过挠曲元件220a和220b的左右移动,以及挠曲元件270a和270b的前后运动,激光源110a~110d和光电探测器160a~160d可以分别在发射透镜130和接收透镜140的焦平面中进行二维扫描。
Cepton的完整LiDAR传感器包括激光发射器、光电探测器阵列、“神秘的微动系统”和相关支持电子设备,所有这一切都安装在一个2英寸的立方体中。只需要提供12V DC电源和以太网连接,这款LiDAR传感器便能提供完整的距离探测。
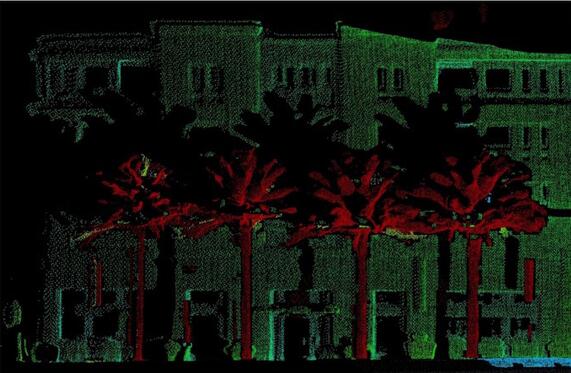
图5 Cepton的LiDAR传感器扫描点云图
如上图所示,LiDAR探测器的分辨率似乎很差,至少与手机中的摄像头相比,其成像像素(技术上准确来说是体素)与1080p相机图像相比至少低了一个数量级。而且,LiDAR也看不到颜色,不过,它可以检测反射率的差异。这一特征对车辆非常有用,因为涂漆的道路交通标志比沥青路面的反射率更大,同理,在LiDAR“眼中”交通标志比松鼠更亮。因此,即使分辨率相对较低,LiDAR也能轻松地以极高的保真度识别出行人、灯柱、植被和小物体。
Cepton的LiDAR模块将激光发射器的运动与反射信号的返回时间相关联,以产生通过以太网实时传输的“点云”图。此外,它还可以补偿汽车的运动,以及它探测到的物体潜在运动。

图 6 May Mobility自动驾驶车辆上装备了Cepton HR80W
兼顾美观和实用,Cepton将LiDAR嵌入车灯
理想情况下,一辆汽车最好能配备四个LiDAR模块:两个在前面,两个在后面。这样可以360°全面了解车辆前后方的道路状况。不过,即使只配备一个前向LiDAR传感器,也总比没有好。
Cepton的LiDAR模块尺寸很小,而且,由于LiDAR传感器需要向前(或向后)透明清晰的视野,因此,很理想的选择是能够方便地将它们集成进入前照灯和尾灯组件中,不易察觉的同时,也完全不影响LiDAR传感器的性能。毕竟,汽车上对激光透明的其他地方并不多。将它们隐藏在前照灯/尾灯中,避免了“耸立”在车顶或在车身其它位置单独开孔的尴尬,可帮助汽车制造商保持自动驾驶汽车流畅的造型设计。
Cepton的LiDAR模块在前照灯中的集成非常方便,据麦姆斯咨询此前报道,日本最大的车辆大灯制造商Koito Automotive(小糸制作所)近日宣布,将Cepton的LiDAR模块直接集成到其LED前照灯组件中。其LiDAR系统基本上可以完全隐藏在LED大灯中,这样一来,采购它的汽车制造商不必再研究如何将LiDAR传感器嵌入到他们的汽车设计中,现在,它已变身成为一款带有以太网接口的大灯。
905 nm硅激光器
将LiDAR模块集成在车灯中,也需要考量安全性问题。LiDAR发射的激光束会射向前方的所有物体,包括行人。如果好奇的人员盯着大灯,想一探究竟,LiDAR发射的激光是否会使人眼睛受伤?
Cepton当然也考虑到了这个问题。目前,许多LiDAR制造商采用了波长1550nm左右的铟镓砷(InGaAs)激光器。在合理的功率水平下,该波长的激光被认为是对人“眼睛安全的”。不过,该波段的激光束也会被LiDAR所要探测的很多物体吸收,因此LiDAR制造商需要在波长和功率之间取舍,以获得他们想要的探测距离和分辨率。
Cepton坚持采用工作波长在905 nm的硅激光器。因为硅激光器对制造商来说更便宜,但它们的激光辐射对哺乳动物的视网膜并不友好。为了弥补这一点,Cepton采用了低功率激光器,同时提高其探测器阵列的灵敏度。Cepton首席执行官裴军表示,结果是我们的LiDAR安全性更高,探测距离更远,制造成本更低。
延伸阅读: