基于微悬臂梁的MEMS探针中与倾斜相关定位误差的量化和校正
2023-05-16 08:37:41 来源:麦姆斯咨询 评论:0 点击:
该论文提出了基于微悬臂梁的MEMS探针中与倾斜相关定位误差的量化和校正方法。作者希望这篇论文提出的思路和发现,对测试工程师和自动探测MEMS探针设计师有一定的启发作用。
据麦姆斯咨询报道,法国里尔大学(University of Lille)的研究科学家Steve Arscott近日在Journal of Micromechanics and Microengineering(JMM)期刊上发表了题为“Quantifying and correcting tilt-related positioning errors in microcantilever-based microelectromechanical systems probes”的论文,提出了基于微悬臂梁的MEMS探针中与倾斜相关定位误差的量化和校正方法。作者希望这篇论文提出的思路和发现,对测试工程师和自动探测MEMS探针设计师有一定的启发作用。
电气测试探针已经有相当长的开发历史。自20世纪70年代以来,业界就开发出了射频(RF)探针用于对微电子革命“成果”(包括模拟和数字器件及系统)进行晶圆级表征。事实上,随着微电子技术的微型化和工作频率的发展演进,电气探针也在不断改进以保持表征性能,这包括了其自身的微型化。
随着晶圆上的探针和目标接触焊盘越来越小,探针的放置变得越来越有挑战性。更小探针的制造也变得更加迫切,传统基于组装的制造可能很快需要被微米/纳米制造所取代。在这一重要背景下,很多学者已经研究了各种位置误差对高频电气探针性能的影响。这些研究大多涉及宏观的商用探针的放置,还没有考量探针潜在的机械柔韧性。
就微型探针而言,已经研究了避免误差的自动定位技术。量化并控制倾斜误差,对于利用微悬臂梁优化自动化探针测试至关重要。然而,后者的研究还没有考量潜在的微型MEMS探针的机械柔韧性。微悬臂梁可用于制造各种微型电气探针,包括射频探针。
微悬臂梁利用MEMS技术制造,这使得探针能够微型化,具有机械柔韧性,并且在制造阶段与微电子材料和器件的结合兼容。然而,为了实现最佳探测和电接触,需要考虑微悬臂梁固有的机械柔韧性。
事实上,针尖滑动本身可以被视为一种定位误差,原则上可以利用滑动补偿来消除这种误差。这种探针的超行程/滑动/接触力的关系已经得到了充分研究和分析。这些分析产生了一套基本且易于使用的建模工具。不过,这些分析忽略了潜在的倾斜相关几何位置误差对此类探针针尖表面接触的影响,而这在实践中很常见。
对于微型射频探针,通常需要三个电触点:即两个接地触点及其包围的信号触点,这对于共面波导(CPW)和微带配置都是如此。中心信号触点与相邻接地触点之间的距离由微波设计定义,这种分离意味着探针针尖具有有限的顶点长度。
为了获得最佳的电接触,这三个触点必须同时与下面的测试特征紧密接触,通常是由光刻工艺定义的金属接触焊盘。还必须存在足够的接触力以实现低电阻电接触。鉴于这种基于微悬臂梁的探针配置,Steve Arscott考量了放置误差的来源,并对其进行了量化。
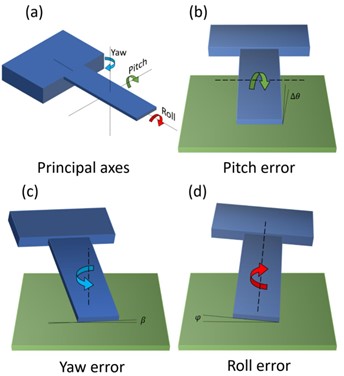
基于微悬臂梁的MEMS探针中俯仰(Pitch)、偏航(Yaw)和滚转(Roll)误差的定义(来源:JMM)
在这项研究中,Steve Arscott尝试量化了基于柔性悬臂量的MEMS探针的滚转误差,以预测滚转误差对此类探针超行程/滑动/接触力关系的影响。由此,探针设计者可以通过建模工具来量化并预测滚转误差角的影响,并且对于高价值MEMS探针,有望在测试过程中避免可能具有破坏性的实际试验和误差方法。
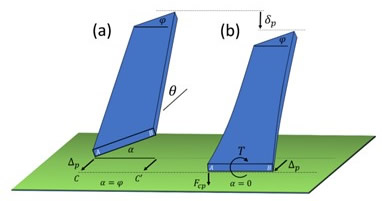
基于具有柔韧性的微悬臂梁的MEMS探针中滚转误差角示意图(来源:JMM)
致密聚苯乙烯的弹性模量在<110>方向上比结晶硅的弹性模量小约100倍,那么厘米级尺寸的聚苯乙烯悬臂梁的刚度与微米级硅悬臂梁就处于同一数量级。因此,Steve Arscott采用致密聚苯乙烯悬臂梁进行了宏观实验,其结果可用于测试该力学模型,还有助于深入了解采用硅基微悬臂梁预期的力学行为。实验结果证明了模型与实验之间的良好一致性。
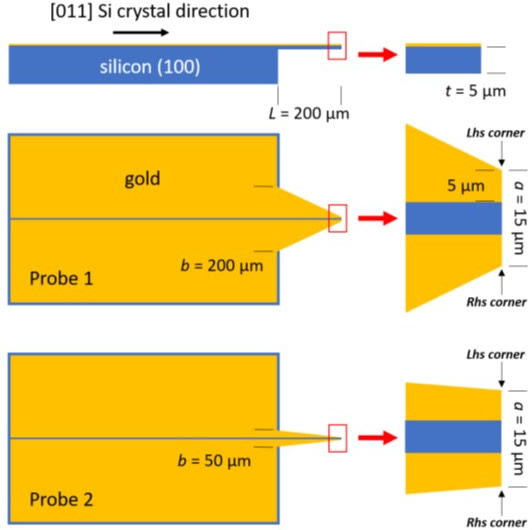
两个基于具有柔韧性的梯形硅微悬臂梁的MEMS双触点探针(来源:JMM)
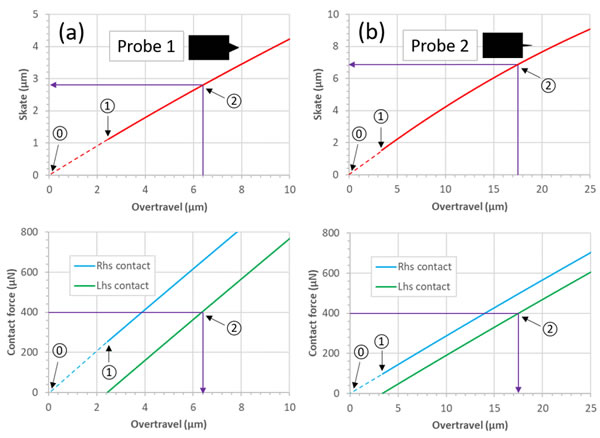
两个基于微悬臂梁的MEMS探针的建模结果(来源:JMM)
总结来说,分析建模可以描述具有两个或多个电接触焊盘的MEMS探针中的滚转角位置误差。通过考量给定悬臂的弯曲、扭转、针尖滑动和接触力,推导出了与尖端平面度所需超行程相关的方程。有趣的是,这些方程只涉及悬臂材料的泊松比,而不涉及弹性模量或剪切模量的绝对值。
对于给定的滚转误差角,该模型可以预测实现探针尖端平面度所需的超行程。该模型还可以预测每个接触焊盘上的接触力,并且原则上可以用于预测滚转误差角对电接触测试质量的影响。该模型可以采用厘米级尺寸的悬臂进行测试。这种方法相比微型悬臂梁更具挑战性的表征要容易。
测量和建模的方法学能够评估材料的机械性能(弹性模量、剪切模量和泊松比)。该模型的预测与实验结果相当吻合。由于该模型是可扩展的,因此至少在原理上,它大致可以近似了解基于硅微悬臂梁的MEMS探针中的滚转角定位误差。
这些研究发现可以提出基于具有柔韧性的微悬臂梁的探针中滚转误差的补偿和校正方案。具有柔韧性的微悬臂梁可以对滚转误差角进行扭转补偿,还可以校正滚转误差角。探针尖端的特定几何形状和实验设置将决定哪种方法最适合。
作者简介:
Steve Arscott是法国里尔大学电子、微电子和纳米技术研究所(IEMN)的CNRS研究科学家。自1994年在英国曼彻斯特大学获得博士学位以来,他的主要研究方向包括微纳制造及其众多应用,例如在IEMN开发的微型硅基MEMS探针的持续创新和研究,可用于微电子电路的高频表征及晶圆级电气表征。
论文链接:DOI 10.1088/1361-6439/acd25e
上一篇:基于空心微针的等离子体传感器,检测真皮间质液中的生物标志物
下一篇:利用双光子激光直写实现基于柔性衬底的3D电极阵列,可用于小动物神经记录