全3D打印柔性、保形、多向触觉传感器,采用仿生互锁和负泊松比结构
2023-11-19 21:18:11 来源:麦姆斯咨询 评论:0 点击:
本研究开发了一种基于仿生互锁和负泊松比结构的全3D打印柔性触觉传感器,用于感知接触压力和环境温度。通过使用定制的3D打印机,研究人员将石墨烯、CNT、硅橡胶和涂有银粉的硅树脂复合材料直接打印在工作表面上,以高效经济的方式制造触觉传感器。
触觉传感器在仿生机器人假肢的开发中发挥着至关重要的作用,特别是在提供触觉反馈方面。然而,现有的传感技术在高压下的灵敏度和对非平坦工作表面的适应性方面仍然存在不足。此外,触觉传感器的制造通常需要复杂且昂贵的制造工艺,限制了其广泛应用。
据麦姆斯咨询报道,近日,英国曼彻斯特大学(The University of Manchester)、牛津大学(University of Oxford)、索尔福德大学(University of Salford)和中国吉林大学的研究人员组成的团队在Communications Engineering期刊上发表了题为“Fully 3D printed flexible, conformal and multi-directional tactile sensor with integrated biomimetic and auxetic structure”的论文,介绍了一种使用自主研发的3D打印系统制造的具有改进传感性能的保形触觉传感器。该传感器通过集成仿生互锁和负泊松比(auxetic)结构来检测剪切刺激。这种设计可扩展传感范围(从0.1至0.26 MPa),并在法向和剪切方向上实现高灵敏度,其值分别为0.63 KPa⁻¹和0.92 N⁻¹。
此外,该触觉传感器能够检测40−90°C范围内的温度变化。为了验证所提出方法的可行性,研究人员将触觉传感器直接打印到仿生机器人手的指尖、近端股骨和腰椎上。研究结果表明,所提出的方法有望在人工上肢中实现感觉运动控制和温度传感,并能监测软骨磨损出现的骨摩骨(bone-on-bone)负载。
由121个传感元件组成的柔性触觉传感器阵列的结构和工作原理如图1所示。该结构包含上下乳突—负泊松比(papilla-auxetic)传感层,并夹在两个柔性电极层之间。触觉元件的传感面积和分布密度与慢适应I型和快适应I型机械感受器相当,以确保所提出的传感器的传感能力与人类受试者的传感能力相匹配。
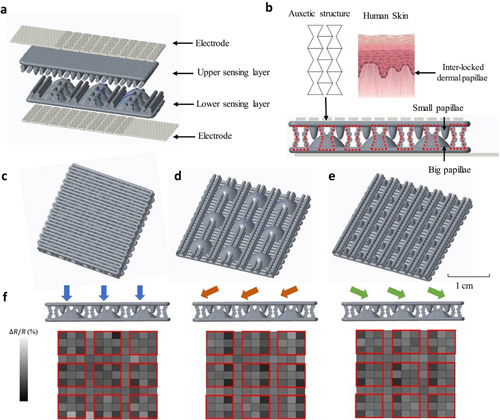
图1 触觉传感器的结构和工作原理
一种石墨烯/碳纳米管(CNT)/硅橡胶复合材料被用作打印材料以制造所提出的触觉传感器。该传感器是利用自主开发的基于熔融沉积建模概念的3D打印平台制造的。材料的制备和3D打印制造工艺如图2所示。
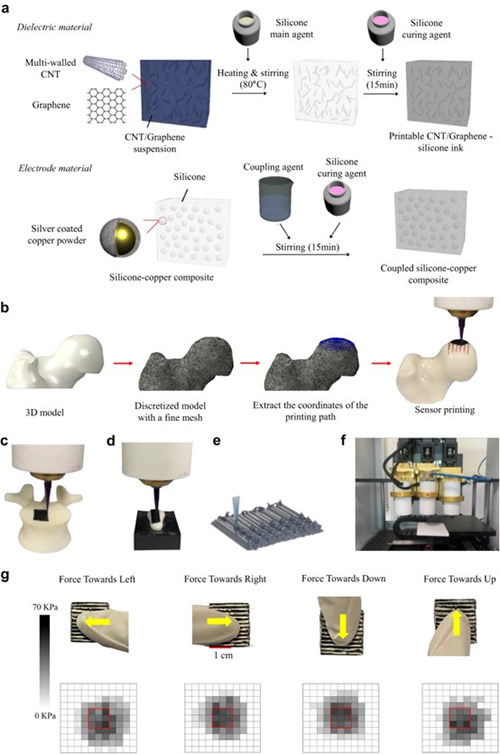
图2 材料制备和3D打印制造工艺
研究人员将其余文献中已报道的触觉传感器的性能与本论文所提出的触觉传感器作了对比,结果如图3所示。他们还利用标准样品传感器评估了所提出的触觉传感器的信噪比(SNR)。由于优化了材料成分和结构设计,SNR约为18.7 dB,高于/媲美其余文献中的压阻式压力传感器。
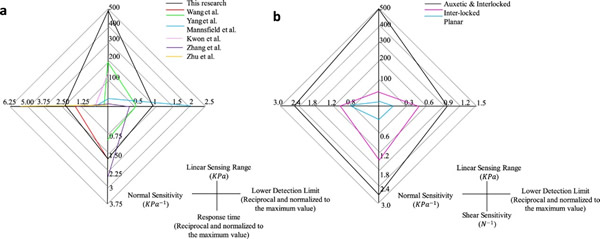
图3 不同触觉传感器的传感性能对比
为了展示触觉传感器阵列检测外部刺激大小和方向的能力,研究人员将传感器直接打印在人体椎骨模型的平台上,并使用它来监测骨摩骨的接触,如图4所示。
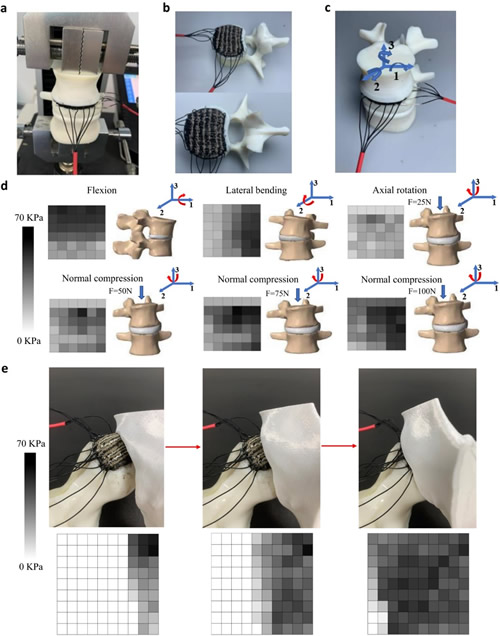
图4 触觉传感器在骨摩骨负载监测中的应用
该触觉传感器的尺寸和形状可分别根据传感区域(从毫米到厘米)和工作表面进行定制。为了展示传感器的可扩展性和适应性,研究人员在仿生机器人手的食指远端指骨上打印了一个18 mm × 10 mm的触觉传感器,如图5a-5c所示。图5d、5e分别展示了仿生手在有和无触觉反馈情况下的反应控制。实验结果表明,触觉传感器能够感知拉动物体(即球)引起的剪切刺激,并启动感觉运动控制以保持稳定的抓握。
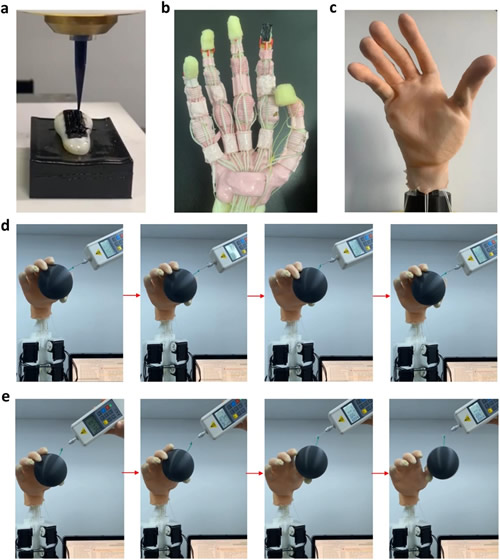
图5 食指指尖打印有触觉传感器的仿生手的抓握性能
研究人员对触觉传感器在温度传感方面的性能作了表征,如图6所示。
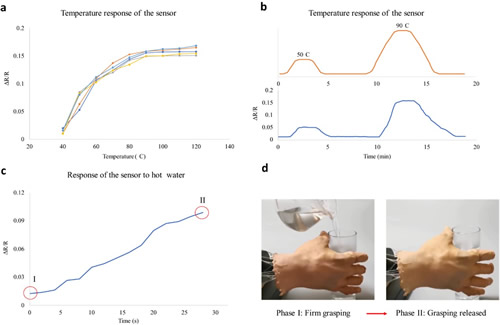
图6 触觉传感器在温度传感方面的性能表征
综上所述,本研究开发了一种基于仿生互锁和负泊松比结构的全3D打印柔性触觉传感器,用于感知接触压力和环境温度。通过使用定制的3D打印机,研究人员将石墨烯/CNT/硅橡胶和涂有银粉的硅树脂复合材料直接打印在工作表面上,以高效经济的方式制造触觉传感器。在灵敏度、传感范围和线性度方面,其性能与大多数已发布的高性能触觉传感器相似。仿生和负泊松比结构的集成是实现压力和力传感的高灵敏度和大线性传感范围的关键因素。复合材料中CNT和石墨烯的优化重量比确保了良好的温度传感性能。负泊松比结构的使用提供了独特的机械性能,可以有效地融入触觉传感器的设计中。这种传感器可以被快速制造到各种工作表面上,包括远端指骨、人体椎骨和远端股骨等,从而实现对复杂生物力学接触的监测。所提出的触觉传感器还能为仿生机器人手提供触觉和温度反馈,实现出色的感觉运动性能。
论文链接:https://doi.org/10.1038/s44172-023-00131-x
延伸阅读:
上一篇:基于石墨烯气凝胶电极的超高灵敏度压力传感器
下一篇:具有高灵敏度、宽量程的光学压力传感器,可用于变压器油箱压力监测