新型多功能3D软体可穿戴传感器,可测量拉伸、扭曲和压力
2022-12-03 20:21:42 来源:麦姆斯咨询 评论:0 点击:
研究人员开发了一款微流控导向的新型3D结构电阻式软体传感器,该传感器基于凝胶设计,可拉伸性强。同时,该传感器功能多样,可用于测量拉伸、扭曲及压力,充分体现了3D结构的优势。
据麦姆斯咨询报道,伊朗德黑兰的谢里夫科技大学(Sharif University of Technology)、德黑兰大学(University of Tehran)及意大利技术研究所(Istituto Italiano di Tecnologia)的研究人员开发了一款微流控导向的新型3D结构电阻式软体传感器,该传感器基于凝胶设计,可拉伸性强。同时,该传感器功能多样,可用于测量拉伸、扭曲及压力,充分体现了3D结构的优势。与以前使用共晶镓铟合金(EGaIn)作为导电材料不同的是,研究人员使用了低成本、安全(生物相容)且常见的导电凝胶。
电阻传感器的基本特性使研究人员能够准确预测其对不同变化的反应。理论上,如果导电物体的形状发生变化,其电阻也会发生变化。而如果导电材料在所有轴类元件中具有可变的几何形状,则电阻会受到任一轴上的外部刺激影响。为了证明上述理论,首先,研究人员需要高度柔软的导电材料,其次,导电材料需具有三个可变轴类元件的3D结构。为此,研究人员开发出一种将3D微流控通道制作成高拉伸材料(如硅橡胶)的技术,以实现所有轴上的元件可变。假设研究人员用导电凝胶(称为活性部分)填充制作3D微通道。此时,他们将拥有一个具有稳定但可变形的3D结构的软体有源部件,作为高度可拉伸的软体传感器,它可以响应不同的刺激,例如拉伸、扭曲和压力。图1a展示了软体传感器(类型1)的特性,该软体传感器具有两个单独的有源部件(W传感器和L传感器),分别用于测量横向和纵向机械刺激。
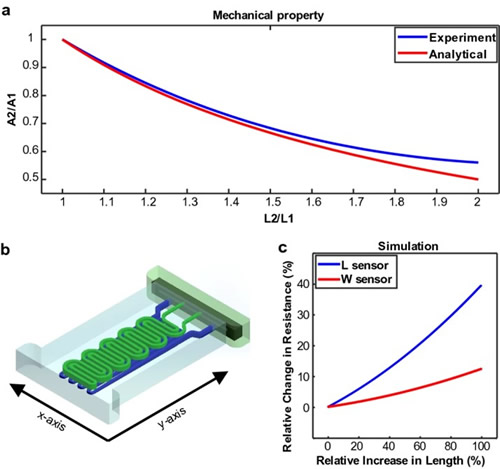
图1 传感器设计(类型2)和模拟结果
图2a展示了平面结构的1型传感器。图2b为双层结构的2型传感器,其中通道厚度呈相反方向线性变化,这意味着L型传感器最厚的部分是W型传感器最薄的部分,反之亦然。换句话说,2型传感器的侧视图呈梯形,旨在添加第三轴元件。之后的研究表明,梯形设计将使传感器能够测量Z轴上的刺激,或者压力。此外,如图2c所示,3型传感器完全采用3D设计,侧视图为梯形。图3为2型软体传感器的分解图。
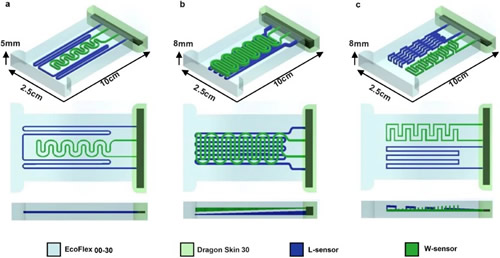
图2 三种用于不同测量目的的传感器设计:(a)平面结构的1型传感器;(b)双层结构的2型传感器;(c)全3D结构的3型传感器
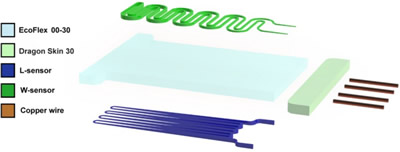
图3 2型传感器的分解图
图4展示了2型软体传感器对拉伸、扭曲和压力的响应。通过施加拉伸刺激,L传感器的响应将增高,W传感器的响应会小得多(约为原来的一半)。通过扭转软体传感器,W传感器的响应将比L传感器更显著。最后,在软体传感器的不同位置施加不同于拉伸和扭曲的压力,传感器的响应完全不同。如果施加了其中一种刺激,则通过电信号可以看出刺激的类型。软体传感器之所以表现出多功能特性,是因为L传感器在纵向方向上有隔室,拉伸会导致L传感器的电阻增加。然而,W传感器在垂直方向上具有较长的隔室,因此,W传感器因拉伸而产生的电阻变化不会像L传感器那样大。此外,通过扭转软体传感器,W传感器的电阻变化将比L传感器更显著。此外,传感器在侧视图中呈梯形,因此通过施加压力,L和W传感器的电阻将发生不同的变化。这是设计3D多功能传感器的主要思路,通过实验,很明显得出,单个软体传感器可以用作拉伸、扭曲和压力传感器。
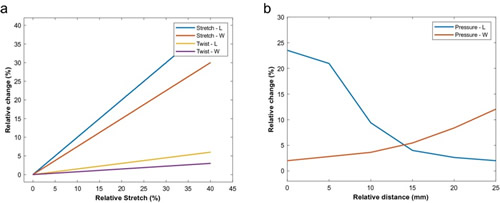
图4 2型传感器对(a)拉伸、扭转和(b)压力的响应
最后,为了测试制造的软体传感器的实际应用,研究人员进行了四个不同的实验。首先,一名女性受试者被要求将传感器(1型)贴合在膝盖上,并完成特定动作。结果如图5a和图5d1所示。然后使用相同的程序测试手臂肘部上的相同传感器(图5b和图5d2)。受试者肘部被要求做特定的动作,以证明这些传感器在物理治疗或性能测量中作为测量系统的另一种应用。最后,为了总结一组完整的动作,将相同的传感器放置在受试者的手腕上,并要求其跟随做一组包括扭转和弯曲的动作,结果如图5c所示。如图5a~c,该传感器可以充分测量膝盖、肘部和手腕等关节的运动。它还可以检测复杂的动作,如扭动手腕或颈部。
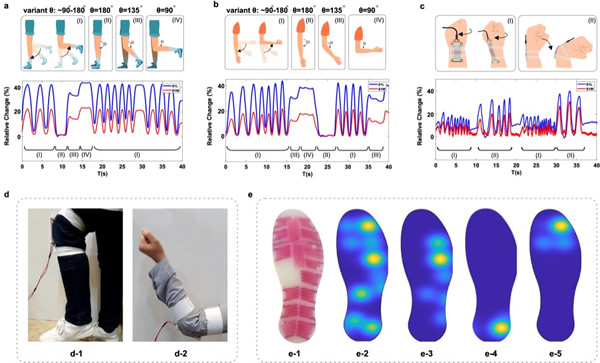
图5 软体传感器在实际应用中的效果
综上所述,该论文介绍了一种制作微流控导向、凝胶基、低成本的全3D电阻式软体传感器的新思路。通过该方法,研究人员可以制造各种传感器,该类传感器可以量化所有的拉伸、扭曲和压力。为了展示传感器的功能,研究人员首先研究了该电阻传感器背后的基本物理原理,使用有限元模型(FEM)对其中一个传感器进行了模拟。接着进行了一组实验测试。结果表明,当使用正弦、斜坡、脉冲和PRBS等机械信号进行测试时,传感器是线性且准确的。该传感器显示出对拉伸、扭曲和压力的多功能响应。然而,为了区分和测量同时施加的所有拉伸、扭曲和压力,需要更复杂的数据分析,如机器学习和深度学习算法,这将在未来进行深入研究。
此外,研究人员通过4小时的实验,证明了新型软体传感器的耐用性。最后,传感器在女性测试对象的膝盖、肘部和手腕上进行了测试。为了评估传感器的压力功能,研究人员还制作了一个完整的3D有源鞋垫,并进行了测试。利用足部梯度图显示结果。这些结果证明,新型传感器有足够的潜力用于现实世界的应用,如医疗康复、可穿戴设备、软体机器人、智能服装、步态分析、运动捕捉、虚拟现实(VR)和增强现实(AR)等。
论文链接:https://www.nature.com/articles/s41598-022-25048-x
延伸阅读: