用于移动机器人触觉传感的仿生、多功能、主动“胡须”传感器
2022-07-30 15:52:19 来源:麦姆斯咨询 评论:0 点击:
最近的研究表明,老鼠的触觉胡须作为主动系统具有高灵敏度、特异性和短响应时间等优点,并且可以通过主动摆动面部胡须来检测形状、位置、方向、表面纹理和径向距离等多种特征。受老鼠FSC传感机制的启发,人们为机器人设计了许多主动人造胡须传感器以提取重要的环境信息。
一些动物(如老鼠和猫)的胡须,可以主动感知周围环境的刺激。这种能力对智能移动机器人具有很大的吸引力。然而,具有类似能力的人造胡须——以便机器人以主动方式(如老鼠)获取周围环境信息,尚未完全开发。
据麦姆斯咨询报道,近日,一支由北京理工大学和美国凯斯西储大学(Case Western Reserve University)的研究人员组成的科研团队在IEEE Robotics and Automation Letters期刊上发表了题为“Bioinspired, Multifunctional, Active Whisker Sensors for Tactile Sensing of Mobile Robots”的最新论文,该论文的研究为移动机器人应用的多功能、主动触觉传感系统的开发提供了新的设计和方法。
感知能力对于移动机器人感知其周围环境以执行有效和准确的控制和响应至关重要。几十年来,人们开发了各种功能性传感器以提高机器人的感知能力。近年来,柔性触觉传感器由于其紧凑、柔顺的接触力反馈系统,使机器人能够执行精细的任务。然而,这些类型的表皮触觉传感器很难通过主动传感提供触觉,从而限制了其在移动机器人反应性避障中的应用。
众所周知,自然界中某些夜间活动的动物,如大鼠和鲸鱼,已经进化出有效的生物触觉系统,它们能够主动感知复杂的刺激并对其产生即时反应。例如,老鼠可以在黑暗的环境中快速奔跑以感知周围环境,或通过摆动它们的面部胡须(或触须)来寻找食物。它们的胡须是由位于面部皮肤下方的毛囊窦复合体(FSC)独立移动的。最近的研究表明,老鼠的触觉胡须作为主动系统具有高灵敏度、特异性和短响应时间等优点,并且可以通过主动摆动面部胡须来检测形状、位置、方向、表面纹理和径向距离等多种特征。
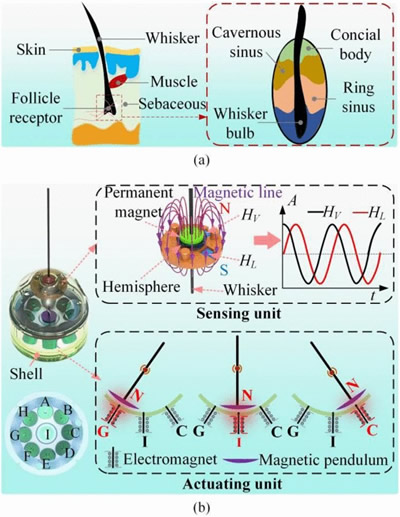
图1 仿生、多功能、主动“胡须”传感器(MAWS)
受老鼠FSC传感机制(图1(a))的启发,人们为机器人设计了许多主动人造胡须传感器以提取重要的环境信息。与传统的被动传感胡须传感器相比,主动胡须传感器能够通过摆动胡须扩大感知区域来提高对未知环境的检测效率。然而,大多数报道的设计都使用电机或机器人作为执行器,导致结构庞大而沉重。虽然压电式主动传感器可以保持紧凑的结构,但它所需的高电压、固有磁滞和有限的摆动幅度阻碍了其在移动机器人中的广泛应用。
为了实现与周围环境的近距离交互,距离估计在机器人的反应性避障和导航中起着关键作用。在过去几年中,激光测距仪或双目视觉已被机器人广泛采用,以提供与环境的远程交互能力。然而,对于机器人来说,实现与周围环境的近距离交互仍然是一个挑战,尤其是在黑暗环境中。有趣的是,即使在黑暗环境中,老鼠等自然动物也可以通过面部胡须与周围环境密切交互。因此,用于计算距离的仿生胡须传感器得到了广泛的研究,并取得了很大的进展。
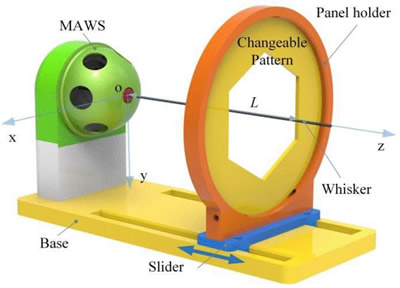
图2 MAWS表征系统的原型
在本论文的研究工作中,作者们开发了一种新型、多功能、主动“胡须”传感器(MAWS),该传感器可以通过打印制造,可用于构建机器人触觉传感系统(图1(b))。它是第一个高度集成的人造胡须传感器,能够以主动方式同时感知形状、距离、大小和方向信息。MAWS能够实现老鼠FSC系统的关键功能。它集成了两个正交分布的线性霍尔传感器来模拟大鼠的毛囊受体,以获取胡须的实时空间运动信息。他们使用九个电磁线圈来驱动主动胡须,以产生有节奏的运动,类似于FSC中的肌肉。通过调节电磁线圈的激励电流和相序,他们设计并实现了两种基本的主动胡须摆动模式(即圆锥摆模式和双向摆动模式)。此外,他们还设计了一个内部表征系统并制作了原型,以评估MAWS在表征环境的形状、距离、大小和方向方面的性能。最后,他们将MAWS集成到自主地面车辆(AGV)中,以测试其在反应性避障中的性能。在MAWS的帮助下,AGV成功地避免了碰撞,证明了所提出的MAWS在机器人领域的有效性和适用性。
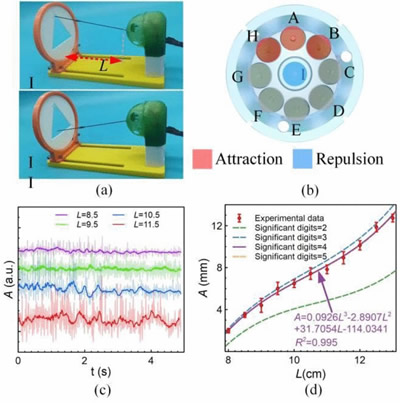
图3 MAWS的距离感知性能
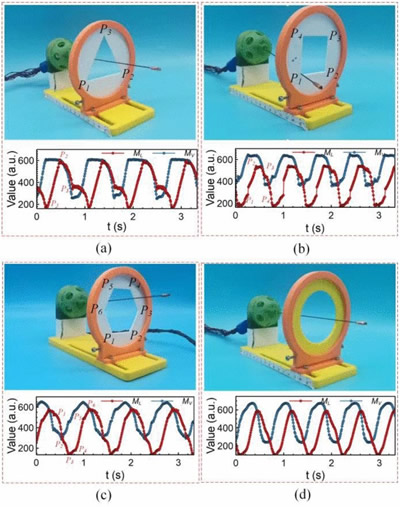
图4 MAWS的形状表征实验
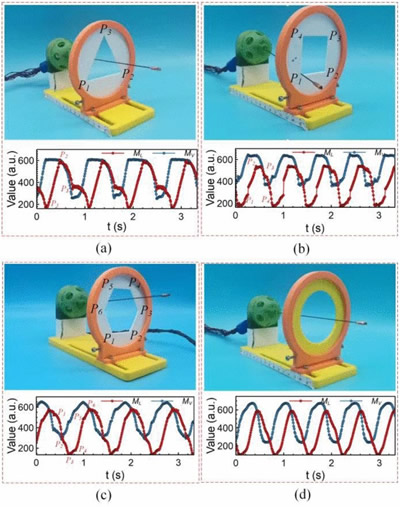
图5 基于安装在AGV机器人上的MAWS的反应性避障实验
论文信息:
Z. Yu et al., "Bioinspired, Multifunctional, Active Whisker Sensors for Tactile Sensing of Mobile Robots," in IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9565-9572, Oct. 2022.
DOI: 10.1109/LRA.2022.3191172
延伸阅读:
相关热词搜索:触觉传感器