探寻iPad Pro激光雷达原理,解读dToF传感技术
2020-05-12 07:23:30 来源:飞芯科技 评论:0 点击:
苹果新款iPad Pro激光雷达的dToF传感技术分为两种工作模式,分别为“正常工作模式”和“省电模式”。“正常工作模式”,投射出的激光红外点阵共计576个;“省电模式”,投射出的激光红外点阵仅有144个点。这款激光雷达的发射端采用了“VCSEL+DOE”的搭配。

图1 苹果官网展示的新款iPad Pro激光雷达扫描仪(以下简称:激光雷达)
导读:2020年苹果(Apple)公司发布了新款iPad Pro,其中,基于dToF技术的激光雷达(LiDAR)是这款平板电脑的亮点,一时间引起了3D成像和传感行业内外激烈的探讨。此前,麦姆斯咨询已经发布了《索尼dToF传感器将SPAD推上风口,消费类激光雷达迎来重大机遇》、《一睹真容:iPad Pro激光雷达扫描仪ToF传感器》等文章来揭开这款激光雷达的神秘面纱。本文由飞芯科技撰写,对dToF传感技术原理进行解读。

图2 拆解苹果新款iPad Pro,获得后置摄像头模组,右侧为苹果新款iPad Pro激光雷达
首先回顾一下苹果官方宣传稿:“特制的激光雷达扫描仪利用直接飞行时间(dToF)技术,测量室内或室外环境中从最远五米处反射回来的光。它可从光子层面进行探测,并能以纳秒速度运行,为增强现实(AR)及更广泛的3D传感应用领域开启无尽可能”。
dToF,全名“Direct Time-of-Flight”(直接飞行时间法),是3D传感方案之一。dToF投射整个面,根据反射时间计算深度信息,具有测距范围远、功耗低、速度快等特点。优势在于针对需要较远距离测绘的应用,如人体的动作识别、建筑物识别、场景识别建模等。
苹果新款iPad Pro搭载的这款激光雷达的视角角约为60°×48°。发射光在一个较大视场角的情况下会随距离迅速衰减,为了保证一定的探测距离,苹果采用DOE(衍射光学元件)实现红外激光点阵发射,每个点覆盖约1°×1°的角度范围。

图3 苹果新款iPad Pro激光雷达采用DOE
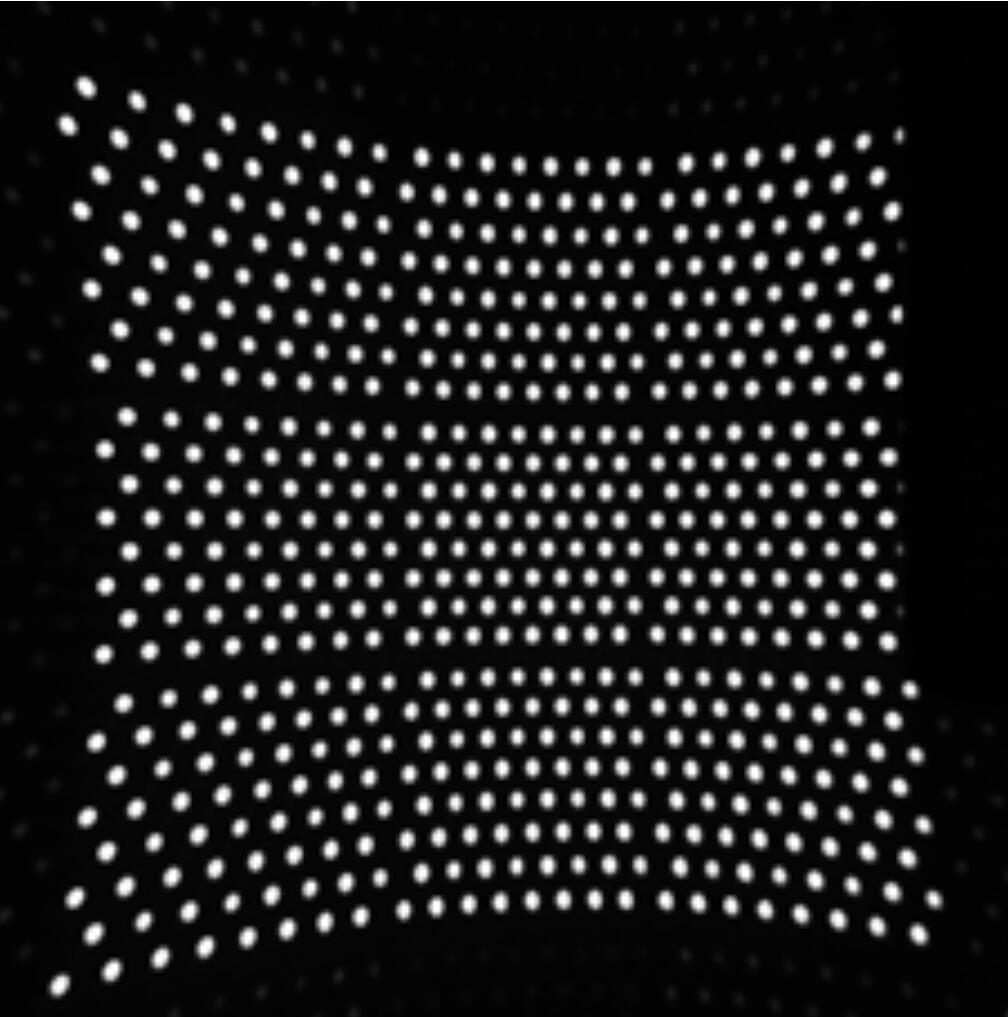
(a)“正常工作模式”
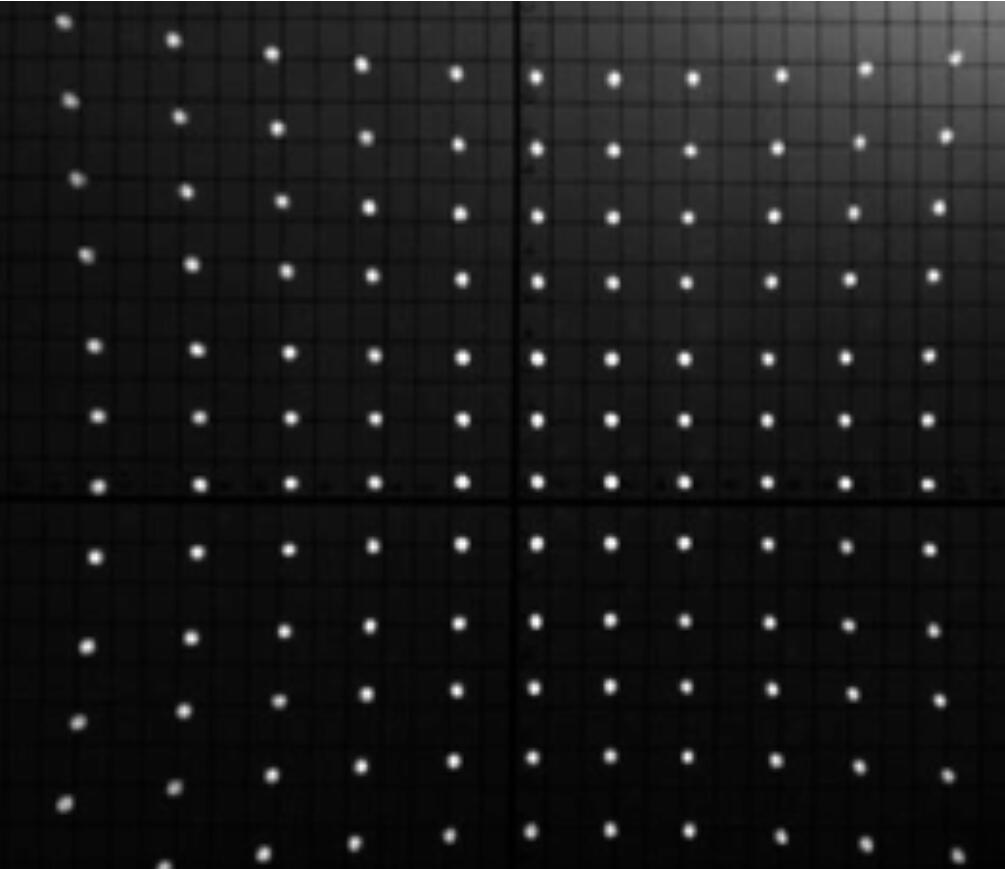
(b)“省电模式”
图4 苹果新款iPad Pro激光雷达发射的激光红外点阵
苹果新款iPad Pro激光雷达的dToF传感技术分为两种工作模式,分别为“正常工作模式”和“省电模式”,图4(a)为“正常工作模式”,投射出的激光红外点阵共计576个,而图4(b)为“省电模式”,投射出的激光红外点阵仅有144个点。另外需要指出的是,上述激光红外点阵中的点并不是同时都发光的,使用高速相机(近红外敏感)拍摄时,投射出的激光红外点阵中的点会交替发光,如图5所示。
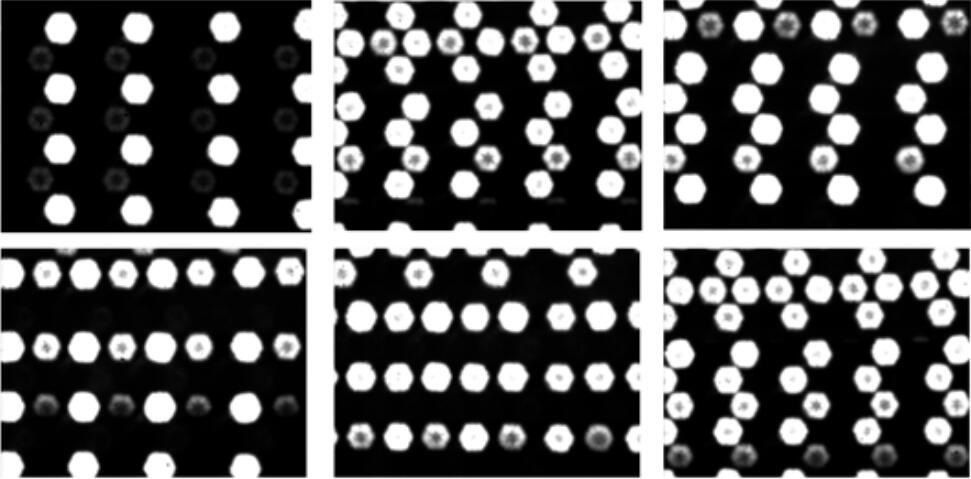
图5 使用高速相机拍摄苹果新款iPad Pro激光雷达投射出的激光红外点阵(瞬时图)
经过仔细测试苹果新款iPad Pro激光雷达的“正常工作模式”,发现投射出的激光红外点阵分为四组,轮流发光。如果取图4(a)中的一块单元区域为例,则发光顺序如图6所示。
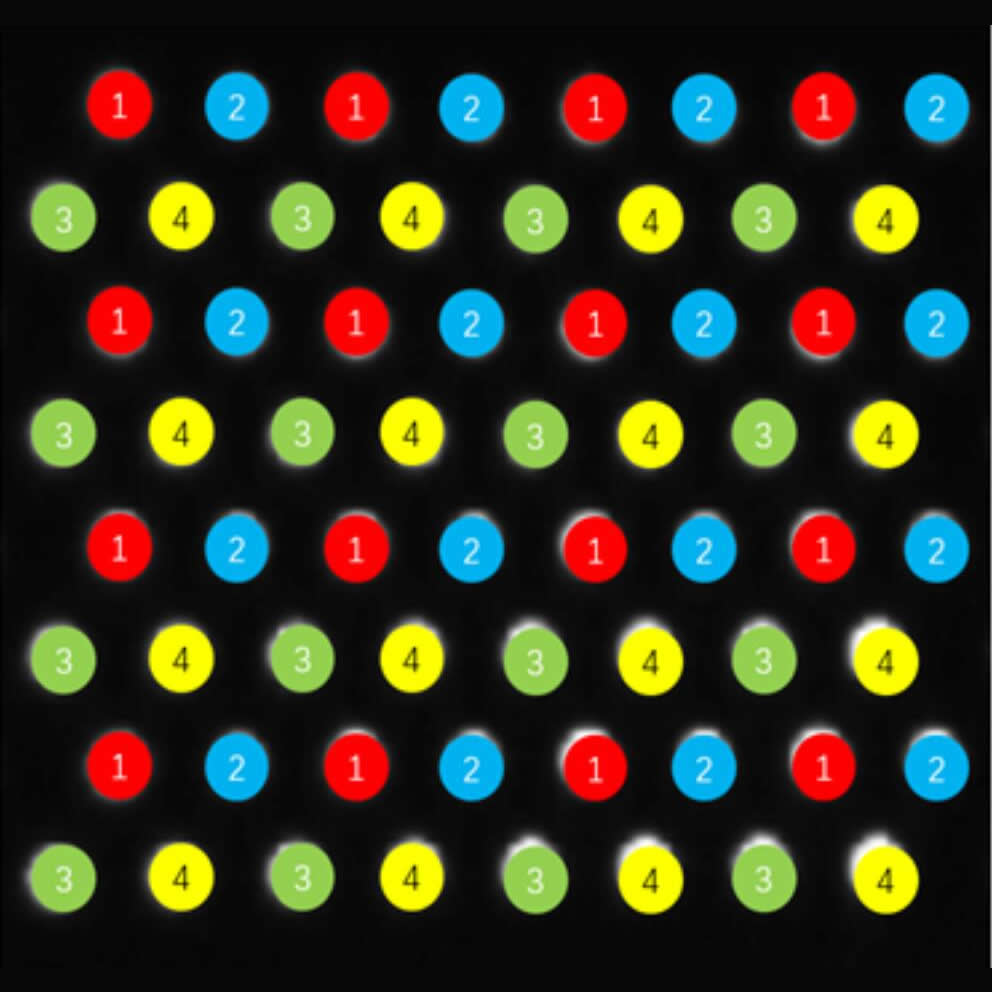
图6 苹果新款iPad Pro激光雷达投射出的激光红外点阵(部分)工作顺序图
在图6中,我们采用不同的颜色标记了激光红外点阵的发光顺序,可以看到在每一行,发光的顺序为“1-2-1-2”重复或者“3-4-3-4”重复。这也是源自于特殊的VCSEL设计。据悉,这款VCSEL是由Lumentum提供,整个VCSEL采用共负极设计,正极有四个区域,驱动信号可以分别控制正极四个区域中的一个。VCSEL部分的结构图如图7所示。
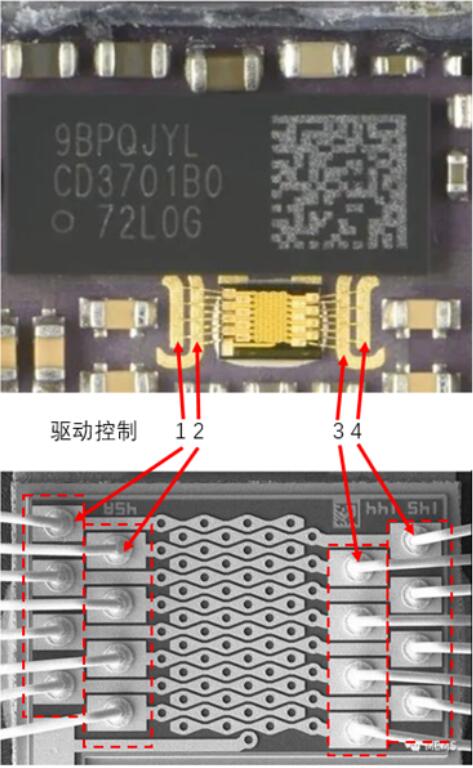
图7 苹果新款iPad Pro激光雷达中的VCSEL及驱动控制示意
由图7可以看到VCSEL:(1)每一行有4个发光点,共计16行;(2)根据正极区域分四组,每组16个发光点。因此,VCSEL共计64个发光点。然而激光雷达在“正常工作模式”时,实际投射出的激光红外点阵却是576个点。为什么呢?
这是因为在发射端采用了“VCSEL+DOE”的搭配,从而在上、下、对角线三个方向分别产生了±1级的衍射,将VCSEL的一个发光点扩展为了9个。从图8可以看到,除了红色方框内为原本的0级、±1级衍射之外,其余的光点均为DOE衍射产生。
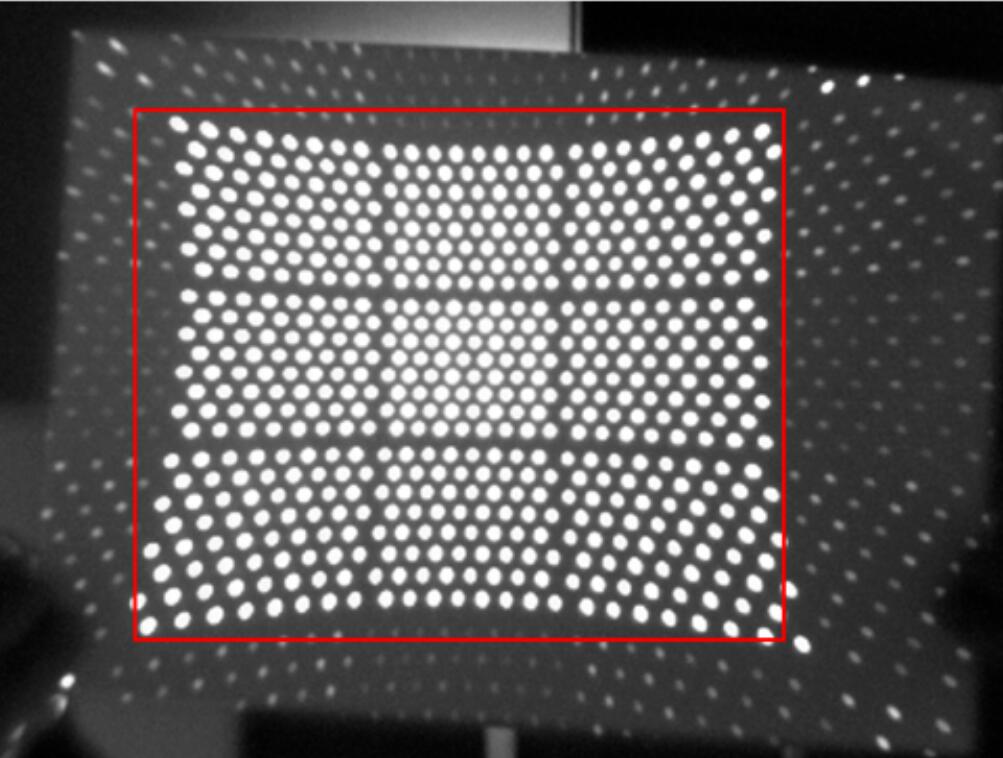
图8 苹果新款iPad Pro激光雷达投射出的激光红外点阵及衍射情况
对于苹果新款iPad Pro激光雷达的dToF测距技术,最重要的是使用多个脉冲产生直方图,其原理可用图9解释。
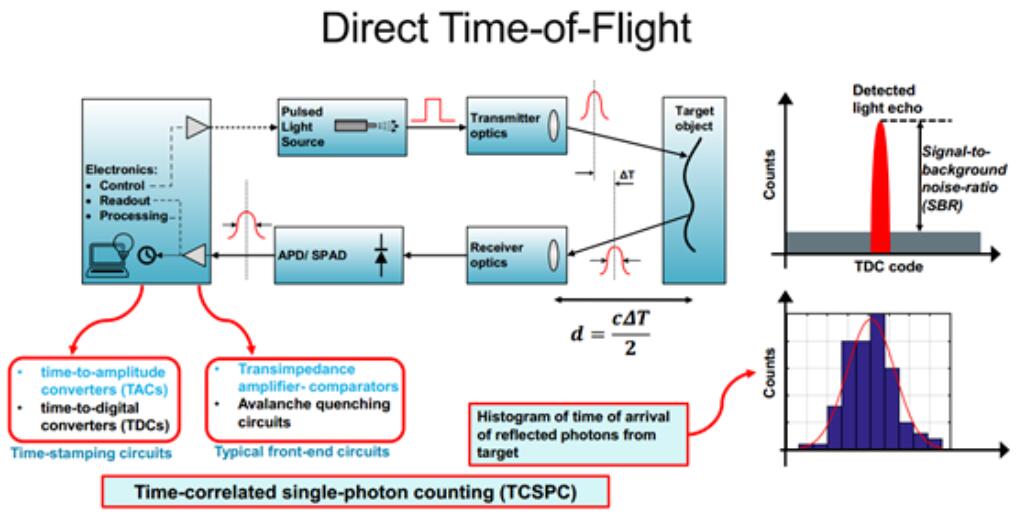
图9 dToF测距工作原理
dToF测距技术的核心为生成光子计数的直方图,而直方图的粗细程度则直接决定了测距的精度。当激光脉冲功率较大的时候,产生的直方图需要少量的激光脉冲即可,但是直方图与原始的光强度包络相差较大。而当激光脉冲功率较小的时候,虽然产生一张直方图所需要的激光脉冲数量较多,但是直方图描绘的包络与光强本身的包络曲线符合度较好。
在苹果新款iPad Pro激光雷达中的索尼(Sony)dToF图像传感器方面,全局帧频为30fps,每一帧包含8个子帧。按照前面的四组VCSEL发光点,每组发光点负责两个子帧。在每个子帧内,VCSEL发光点产生很多个脉宽约2~3ns的激光脉冲。由于每个子帧大约包含80,000个激光脉冲,那么VCSEL每组发光点每秒会产生约480万个激光脉冲。
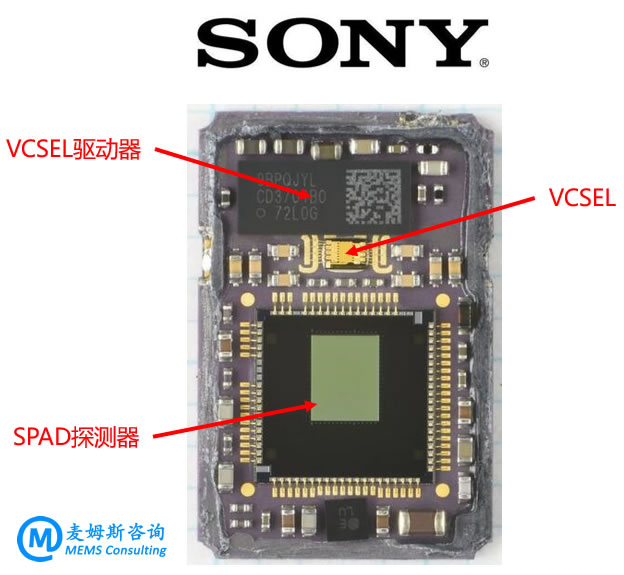
图10 苹果新款iPad Pro激光雷达中的SPAD探测器、VCSEL及其驱动芯片
这里对于索尼所选择的激光脉冲数量和功率还是很有争议的。对于SPAD阵列来说,每个激光脉冲内的信号光子数应该尽量多,才能保证每个激光脉冲有更大的概率被探测到(特别是在远距离的时候)。不过,激光脉冲数量越多,储存直方图所消耗的内存、传输直方图消耗的带宽都会成比例增加。这也对探测芯片内部的数据存储和传输带来了极大压力。据小编估算,当前需要超过10Gbit/s的数据传输速率才能将所有的信号完整传输出来。既然苹果和索尼做出这样的选择,想必他们对于自己的dToF传感技术大有信心。
延伸阅读:
《激光雷达(LiDAR)技术及市场趋势-2019版》相关热词搜索:激光雷达 ToF传感器 LiDAR VCSEL DOE
上一篇:通用汽车与FLIR达成合作,将在其工厂部署体温筛查热像仪
下一篇:惠尔智能携手Ouster打造独有的自动驾驶解决方案