SPAD会成为未来激光雷达的光电探测标配吗?
2020-03-13 20:01:56 来源:麦姆斯咨询 评论:0 点击:
SPAD的结构与APD类似。两者都有PN结,在高电场区因为碰撞电离而发生载流子倍增或雪崩。将电子或空穴注入高电场区,可以触发雪崩。在注入之前,电子空穴对由光子吸收、热噪声或隧穿引发,后两者是暗计数的来源。
据麦姆斯咨询介绍,曾经出现在科幻电影中的无人驾驶汽车,目前已经在某些道路上测试。当这项科技的安全性发展到足以被大众接受,那就成为一种改变人类生活方式的颠覆性创新技术。
开车,尤其是在城市里开车,是一项复杂的任务,需要对周围环境不断收集感知信息。当驾驶员暂时失去意识或缺少相关信息输入时,可能会出现致命事故。
人类驾驶基本靠“本能”:不计算距离或速度,却能给出判断并执行。自动驾驶汽车和机器,是没有“本能”的,所有驾驶“决策”都是基于对感知信息(如距离、速度、颜色或形状)的实时计算。
这些信息输入必须通过车载传感系统获得。汽车获得周围环境的高分辨率三维空间视图,激光雷达(LiDAR)是可以提供此类最关键信息的系统。

图1:激光雷达工作原理示意图
光:汽车与周围环境的感知“桥梁”
激光雷达通过光去探测周围环境。一种称为扫描式飞行时间(ToF)激光雷达则是使用脉冲式激光(见图1)。激光发射的瞬间,电子时钟被激活。光束操纵单元将脉冲引导到所需方向。脉冲从目标反射回来,一部分被光电探测器所接收。
在响应中,与前端电子器件连接的光电探测器产生电信号,从而使时钟无效。通过测量飞行时间Δt,计算出与反射物体之间的距离d,计算式为d=12cΔt,其中c指光在介质中的速度。
脉冲持续时间及其峰值功率是两项关键参数。脉冲持续时间决定距离分辨率,峰值功率决定最远测量距离。简言之,ToF激光雷达要求持续时间短和峰值功率高。当前设计的持续时间约为5ns,峰值功率约为100W。探测此类脉冲要求探测器带宽与脉冲持续时间的倒数相当,即大约200MHz。
激光器发出的激光只有小部分能到达光电探测器。理想情况下,回到光电探测器的实际光子数取决于与目标的距离、目标的反射率和大气条件。此外,弱光信号会受无信息背景(阳光照射、路灯或汽车前灯)干扰。
在基本的模拟探测系统中(见图2),窄带光学带通滤光片会遮挡部分背景光。光电探测器,如雪崩光电二极管(APD)或硅光电倍增管(SiPM)能够响应入射光并输出电流脉冲。
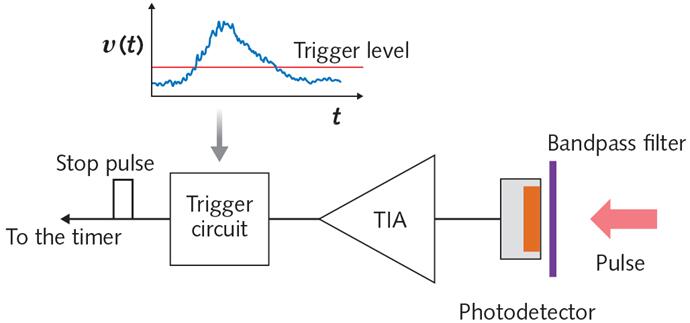
图2:当跨阻放大器的输出电压上升到特定电平时,触发电路将发出停止计时器的脉冲。
跨阻放大器将电流脉冲转换为电压脉冲。如果电压瞬时值超过某个特定水平,触发电路将停止计时器,并给出飞行时间。这看似很简单,那么为什么说ToF激光雷达对光的探测具有挑战性?
噪声带来的困扰
最简短的答案就是噪声。弱光信号的固有噪声(光子散粒噪声),还需要与多种来源的噪声竞争,如未经滤波的背景噪声、光电探测器和放大器的暗电流和增益偏差。测量距离不确定度可以用下面的公式表达:
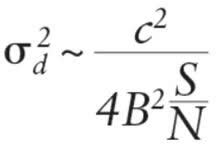
对于给定的探测带宽B(由脉冲持续时间设置),随着探测光信号的信噪比(S / N)的增加,信号噪声得到改善。
信噪比必须大于1才能探测到有用信息,并且值越大,距离测量越精确。我们面临的挑战是令信噪比最大化。对于给定的输入光,这样做有利于让光电探测器的光谱感光灵敏度高、本征增益高且噪声特性恶化(过剩噪声系数)小,暗电流小,结电容小。
其它理想特性还包括最小的时间抖动和高动态范围。但是,满足上述所有要求的光电探测器是不存在的,在实际工程设计时会采取折衷方式处理。
讨论这些复杂的折衷处理方式已经超出了本文范围。我们将聚焦于一种最近才用于ToF激光雷达的新型光电探测器——单光子雪崩光电二极管(SPAD)。
SPAD的结构与APD类似。两者都有PN结,在高电场区因为碰撞电离而发生载流子倍增或雪崩。将电子或空穴注入高电场区,可以触发雪崩。在注入之前,电子空穴对由光子吸收、热噪声或隧穿引发,后两者是暗计数的来源。
雪崩机制
APD和SPAD的主要区别在于雪崩或放电特性。SPAD的反向偏置电压VBIAS超过击穿电压VBD。时就会引发盖革模式。一旦触发,施加在SPAD的VBIAS不变,雪崩持续进行,产生无限的增益,即一个光子引起连续的电流。相比之下,施加于线性模式APD的VBIAS低于VBD。放电一旦开始,就会迅速自淬灭,从而产生有限的电流,因此,APD的增益是有限的。
如上所述,单个入射光子可以激活SPAD,从而产生持续的电流。实际上,光子已将SPAD从截止状态切换为开启状态,或者说是从光敏状态切换为对光不敏感的状态(正在进行放电的SPAD不再对光敏感)。这时相当于光开关,但未来要探测到下一个入射光子,有必要通过增加电阻实现猝灭,再次将SPAD重新设置为截止或光敏状态(见图3)。
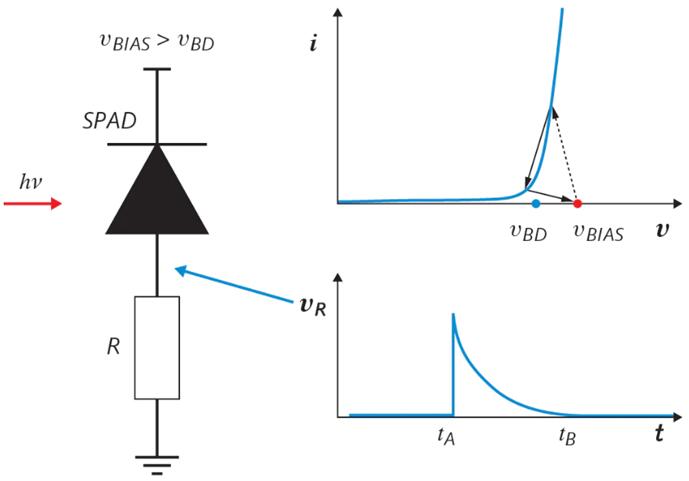
图3:左图为SPAD与猝灭电阻串联的偏置电路。右上图是IV特性图,解释了SPAD的工作原理,右下图显示了电阻的电压随时间的变化情况。
图3的左图显示了与电阻R串联的反向偏置SPAD。SPAD处于截止状态:没有电流流过,SPAD两端的电压为VBIAS。SPAD处于亚稳定的光敏状态。IV特性曲线(右上图)上的红点表示此状态。由于没有电流流过,所以电阻上的电压VR = 0。
假设SPAD吸收了一个光子,并在tA触发了盖革模式的放电(见图3的右下图)。电子开始流动,电流迅速增加。根据基尔霍夫电压定律,随着电流增加,电阻两端的电压也增加,而SPAD两端的电压会下降。
一旦SPAD电压下降至0~VBD,PN结上的电场不再持续激发碰撞电离,雪崩停止。当VR达到峰值时发生猝灭。随后,SPAD进入恢复阶段:电流减小,SPAD上的电压增加到VBIAS;SPAD再次恢复光敏状态。
图3右下图中的电压波形实际上是对单个光子(或暗事件)的相应输出。波形不对称,其特点是上升时间非常短(约1-2ns),下降时间相对较长(约数十至数百纳秒)。
结电容
下降时间会影响恢复时间,这取决于SPAD的结电容CJ和猝灭电阻R。恢复期间,SPAD对光不敏感*,恢复的持续时间称为SPAD的死区时间。曲线下的面积(用电子表示)是增益。令人惊讶的是,增益不取决于R,而与CJ(VBIAS - VBD)成线性关系,其中括号中的数值称为过电压。
*此陈述并非完全正确。在恢复期间,随着SPAD上的电压增加并高于VBD,盖革放电的可能性并非为零。在恢复阶段可能会发生增益较小的雪崩。残留脉冲现象就是证据。
SPAD的关键光电特性有光子探测效率、增益和暗计数率。SPAD可以由单个光子激活,但是该光子可能是背景的一部分,而不是信号的一部分,那么该器件是如何为ToF激光雷达实现距离测量呢?
在最简单的设置中,激光向目标的给定点发射一系列短时间脉冲,时间间隔为T。这意味着目标会被反复照亮。对于光电探测器,在每个周期T,测量脉冲发射时间点与SPAD触发时间点之间的时间间隔Δt。尽管可以通过暗事件、背景光子或信号光子来触发SPAD,但如果进行了数十、数百次或数千次测量,则触发时间的直方图的峰值将出现在Δt处,由于暗事件和背景光子会在随机时间触发SPAD,而信号只能在特定时间(往返时间)触发。
如果没有暗事件和背景干扰时,触发时间的直方图将由往返时间的事件组成,分布宽度主要受脉冲持续时间和SPAD时间抖动影响。存在暗事件和背景光时,分布宽度会变宽,所有事件都会受到上述问题的影响。
无限背景
在无限背景的范围内,直方图是平坦的,不包含任何信息。汽车激光雷达在任何光照条件下都能正常工作,即使在阳光明媚的日子里。但是,在这里,直方图变宽、变平的可能性是真实存在的。
为了减少背景影响,可以将测量技术改变为空间和时间相关性。为此,不采用单个SPAD,而采用四个SPAD组成一个光电探测单元(见图4)。
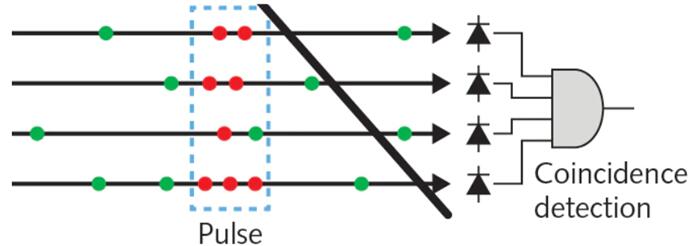
图4:四个SPAD组成光电测量单元的基本概念,绿点代表背景光子,而红点代表信号光子。
红点和绿点分别代表信号光子和背景光子。背景光子随机到达SPAD阵列,四个SPAD不太可能在短暂的时间窗口内激活。因为没有空间相干性(激活的SPAD数量少于四个)并且没有时间相干性(SPAD不会同时激活),所以可以消除背景光子引起的触发。
但是,信号光子会组成“团队”,因此当它们撞击SPAD时,可能会同时触发。该事件将被计数在直方图中。基于空间和时间相干性的探测可以减少对背景和某些类型的噪声测量(例如增益变化和放大器噪声)的敏感度。
但是,在工程设计中要得到改进总是要付出一定的代价。在这种方法中,缺点是更长的数据获取时间和更复杂的数据处理。优点足以弥补缺点吗?只有时间会给出答案。
延伸阅读:
相关热词搜索:激光雷达 LiDAR 光电探测器 APD SPAD
上一篇:豪威科技发布Nyxel 2技术,显著提升近红外图像传感器性能
下一篇:南京大学开发出多功能平面太赫兹光子元件,应对太赫兹通信挑战