华盛顿大学利用量子效应开发更小、更经济的片上激光雷达
2023-07-11 18:21:12 来源:麦姆斯咨询 评论:0 点击:
华盛顿大学研究人员开发的新型片上激光雷达,利用表面传播的声波来操纵激光束,就像在某个区域来回照射的探照灯。由此,自动驾驶汽车就可以“看”到远处的行人、车辆等物体。
在现实世界中移动运行设备,需要利用传感器来感知周围的环境。激光雷达(LiDAR)便是热门的传感器之一,它有很多潜在应用,但往往由于其尺寸太大或成本太高而无法成为可行的选择。
3D激光雷达是一种已经存在半个多世纪的激光成像技术。与雷达(RADAR)一样(一种类似的基于无线电波的传感方式),激光雷达可以扫描整个区域,然后接收并解析反射信号。
一直以来,这些基于激光的传感系统通常需要用到运动部件,这会增加系统的重量、复杂性、耐久性以及成本。
据麦姆斯咨询报道,美国华盛顿大学(University of Washington)电气和计算机工程系的一支研究团队开发了一种尺寸更小、成本更低且没有运动部件的激光雷达,这一突破性技术有望很快为很多应用领域带来变革。该研究成果已经以“Frequency–angular resolving LiDAR using chip-scale acousto-optic beam steering”为题发表于Nature期刊。在这项研究中,研究人员利用量子效应在芯片上构建了激光雷达,这是一种不需要运动部件的轻量化方案。
领导这项研究的华盛顿大学物理学教授Mo Li说:“我们发明了一种全新类型的激光束操纵器件,它采用芯片集成方案,且不需要任何运动部件来执行扫描。这项新技术利用芯片表面传输的声音来引导扫描激光进入自由空间,它可以探测100米外的三维物体并对其进行成像。”
Mo Li教授是电气和计算机工程系研究部副主任,也是该论文的通讯作者。本研究的大部分实验工作由共同第一作者、博士后学者Bingzhao Li和研究生Qixuan Lin合作完成。两人都是Mo Li教授领导的华盛顿大学光子系统实验室的成员。
Mo Li教授把激光雷达形象地比作在某个区域来回照明的探照灯。他们开发的片上激光雷达的最大区别在于,其发射的激光束可以通过量子效应进行操纵。
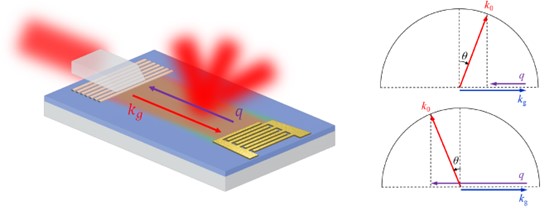
声光光束操纵(AOBS)运行原理
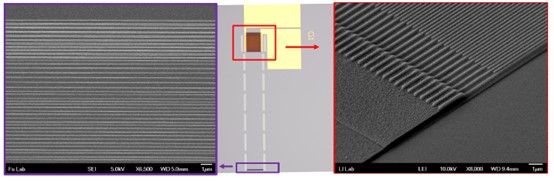
声光光束操纵器件结构
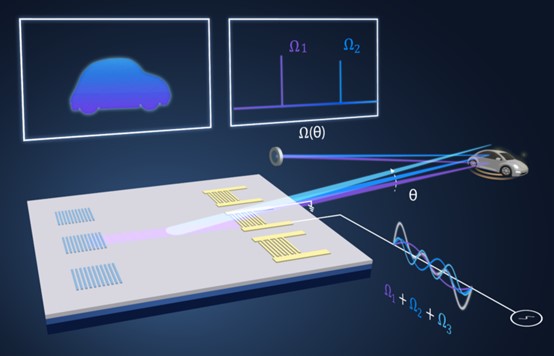
激光束仅略高于芯片表面上方通过,对眼睛来说是安全的。同时,该技术利用叉指换能器(IDT)在芯片上激发声波。所产生的振动根据其频率来回“操纵”激光束,其运动可以连续或步进式进行。
随后,激光束从环境中的物体反射回到激光雷达,并由探测器接收。然后通过软件解析反射光的信息,从而构建反射物体的3D图像。
华盛顿大学研究人员开发的新型片上激光雷达,利用表面传播的声波来操纵激光束,就像在某个区域来回照射的探照灯。由此,自动驾驶汽车就可以“看”到远处的行人、车辆等物体。
该芯片采用一种被研究小组称为“声光光束操纵(AOBS)”的技术,其芯片可以产生几个GHz的高频声音脉冲(远超人类可以听得见的范围)。这些振动会产生一种被称为声子的量子准粒子。这种声子可以改变组成光束的光子的偏转,使光束像通过棱镜一样发生偏转。
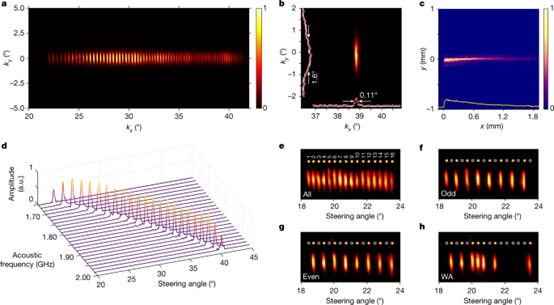
声光光束操纵(AOBS)和多光束生成的表征
光的散射大部分保留在芯片二维波导的平面内。因此,激光可以穿过由振动产生的量子级介质。声子能够根据频率改变光束的方向,从而使其扫过一定角度,形成大约20度的视场。
本质上说,这种振动产生了相当于衍射光栅的效果,声子改变了激光相干光的角度和波长。
这是该系统的另一个关键特征,因为波长的变化也对应于频率的变化。该现象源于一种众所周知的“布里渊散射”效应。正因为如此,光束角度的每一个微小差异实际上都会被有效“标记”,因为它具有不同频率的光子。
这使得可以利用单像素相机检测返回的光子。然后,通过软件处理这些信息,以快速构建包括扫描场景的图像。
“我们可以通过反射激光的‘颜色’来判断其方向,我们将这种方法命名为‘频率-角度解析’。”Qixuan Lin说,“我们的接收器只需要单个成像像素,而非完整的相机,就可以对远距离的物体进行成像。因此,它能够比当前常见的激光雷达接收器更小、更经济。”
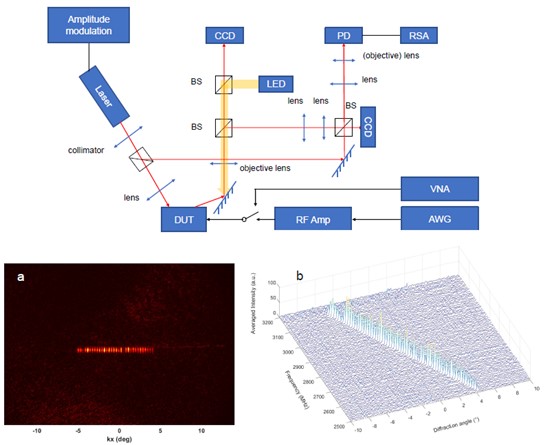
测量实验设置。a. 由位于k空间平面右侧CCD相机捕获的转向光束;b. 相对于声波频率的转向光束角。
该系统目前的探测距离约为110米。然而,在高速公路上正常行驶的自动驾驶汽车通常需要大约三倍的探测距离才能确保安全。目前的探测距离限制,主要源于该系统目前仅有约5%的效率。Mo Li教授认为,他们还需要经过一年的开发,才能达到300米探测所需要的50%效率。这种探测距离就可以使高速上行驶的车辆有足够的时间对其路径上的物体和情况做出恰当响应。
自动驾驶汽车是下一代激光雷达重要的商业应用之一。尽管特斯拉首席执行官Elon Musk至今还不这么认为,但是,成本足够低的激光雷达或许会令他改变想法。
此外,这种新方案还使系统的重量显著减轻,使其在无人机领域也有了广阔的应用前景。对于机器人领域,还可以在从仓储自动化到军用机器人等用例中应用这一新系统。更小的尺寸加上没有运动部件,也为医学成像应用提供了独特机遇。
Mo Li教授和Bingzhao Li计划成立一家创业公司,在两三年内将他们的这项技术商业化。并且,他们已经从华盛顿大学创业孵化器CoMotion和华盛顿研究基金会获得了种子资金。
Mo Li教授说:“两名研究生仅花了大约九个月的时间就开发出了这项技术,侧面反映了这项技术比较容易实践。从本质上讲,这款器件并不复杂。它是一个好创意的直接实现,而且很有效。”
延伸阅读: