集成远端MEMS扫描器的共聚焦激光内窥镜,用于实时组织病理学检查
2022-11-27 14:32:00 来源:麦姆斯咨询 评论:0 点击:
微机电系统(MEMS)是一项强大的技术,可用于设计和制造内窥镜远端的微型扫描机构。远端(相对于近端)为控制焦点位置提供了更大的灵活性。除了横向偏转,远端机构还可以执行轴向、物镜后和随机访问扫描。这些功能可以对上皮组织进行更全面的检查。
共聚焦激光内窥镜(Confocal laser endomicroscopy)是一种新兴的成像技术,作为一种常规医学内窥镜附件正在开发临床应用。这种柔性光纤耦合仪可以用于识别中空器官(如结肠)上皮细胞中的疾病。这些薄层组织具有高度代谢活性,是许多疾病过程的起源,如癌症、感染和炎症等。内窥镜可以实现亚细胞分辨率,实时提供具有“组织学”质量的体内图像,以指导医生做出临床决策。
组织的物理活检常常伴随出血和穿孔风险。通常,很难恰到好处的采集活检样本,要么太多要么又太少。每切除一个样本都会增加手术成本。此外,还需要几天的时间来处理样本以供病理学专家进行评估。在等待病理结果期间,患者时常会感到焦虑。相比之下,MRI、CT、PET、SPECT和超声等其他临床成像方法,又缺乏实时显示体内亚细胞分辨率上皮组织所需要的空间分辨率和速度。
微机电系统(MEMS)是一项强大的技术,可用于设计和制造内窥镜远端的微型扫描机构。远端(相对于近端)为控制焦点位置提供了更大的灵活性。除了横向偏转,远端机构还可以执行轴向、物镜后和随机访问扫描。这些功能可以对上皮组织进行更全面的检查,包括垂直截面成像、大视场(FOV)上的无像差扫描,以及在用户定义的子区域提供高性能。
MEMS解决了仪器远端封装扫描机构所提出的空间挑战。与体积庞大的检流计式扫描器相比,MEMS以小尺寸、高速率和低功耗提供了优异的性能。此外,其简单的制造工艺还能够以低成本实现大批量生产。
此前已有报道许多相关的MEMS设计。但尚未开发出足以通过医用内窥镜工作通道进行实时体内成像的MEMS设计,以实现广泛的临床转化。据麦姆斯咨询报道,美国密歇根大学的一支研究团队在内窥镜远端利用MEMS扫描器,实现在常规临床内窥镜检查中捕捉人体受试者的体内图像。
内窥镜设计
研究人员在内窥镜远端利用MEMS扫描器开发了一种光纤耦合仪,以捕捉体内具有类似组织学特征的实时荧光图像。研究人员将单模光纤(SMF)封装在柔性聚合物管中,并在λex = 488 nm进行激发。这种配置缩短了远端的末端长度,并能够向前通过标准医用内窥镜的工作通道。
其透镜设计可在轴上实现接近衍射极限的分辨率,数值孔径(NA)=0.41、工作距离=0 μm。还制作了精密衬垫以精确对准光学元件。MEMS扫描器被封装在内窥镜远端直径2.4 mm、长度10 mm的刚性末端中(如下图a所示)。这样的尺寸使其可以在内窥镜检查中作为附件实现临床应用。入射到组织上的最大激光功率为2 mW。
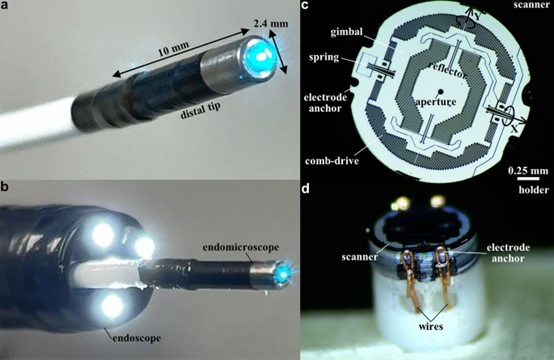
共聚焦激光内窥镜及其MEMS扫描器
该扫描机构包括一个安装在万向节上的反射器,万向节由一组正交梳状执行器驱动,以李萨茹模式横向(XY平面)偏转光束(如上图c所示)。其中心蚀刻有直径为50 μm的孔,以使激发光束通过。MEMS扫描器的驱动频率接近结构共振频率,并可以通过调整扭转弹簧的尺寸来调整。在器件周围蚀刻了电极锚,以提供电源和驱动信号连接(如上图d所示)。
成像系统
成像系统设计安装在一辆便携式推车上,可以推入手术室。研究人员开发了图形用户界面,以支持医生和护士等用户的使用,并可以手动检查扫描器的驱动频率、光束形状模式和图像视场。
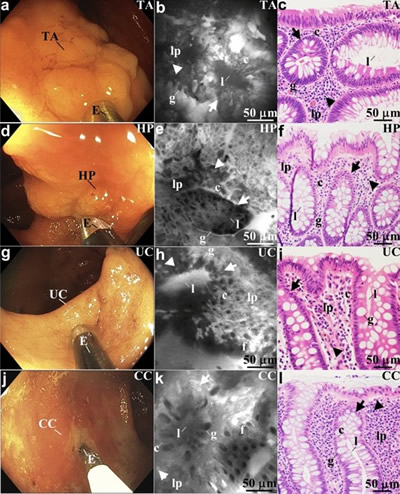
体内共聚焦图像样张
总结来说,研究人员展示了一种柔性光纤耦合共聚焦激光内窥镜的临床应用,利用远端MEMS扫描器采集体内图像。在共振频率下,使用高密度李萨如扫描模式实现了高达20 Hz的帧速率,有效减轻运动伪影。其中,折叠光路可以实现光束扩展和1.1 μm的横向分辨率。
在常规结肠镜检查中,可以从正常结肠粘膜、管状腺瘤、增生性息肉、溃疡性结肠炎和克罗恩氏结肠炎中采集具有类似组织学质量的荧光图像。能够识别单个细胞,包括结肠细胞、杯状细胞和炎性细胞;区分粘膜特征,例如隐窝结构、隐窝腔和固有层。
其精密元件经过微加工,以在直径为2.4 mm、长度为10 mm的器械内提供光学元件和机械部件的精确对准。其光学设计充分缩减了刚性远端末端的长度,以向前通过医用内窥镜中具有标准尺寸(3.2 mm直径)的工作通道。因此,这款医疗器械具有广阔的临床应用前景。
论文链接:https://doi.org/10.1038/s41598-022-24210-9
延伸阅读:
上一篇:紫外激光加工的可拉伸多模态传感器网络,用于软体机器人交互控制
下一篇:Seno Medical推出用于乳腺癌的光声成像系统Imagio