基于反射镜和棱镜的多视角ToF激光测距装置
2022-07-24 09:59:49 来源:麦姆斯咨询 评论:0 点击:
这项研究使用定制的基于过阈时间法(TOT)行走误差补偿的直接飞行时间(dToF)测距装置来评估FOV重定向光学元件对测距准确性和精确性的影响。
据麦姆斯咨询报道,近期,卢布尔雅那大学(University of Ljubljana)研究了利用固定反射镜和棱镜重定向基于光的飞行时间(time-of-flight,ToF)测距装置(通常称为脉冲激光雷达)视场(field of view,FOV)的可行性,以备将来在机器人中使用。这项研究使用定制的基于过阈时间法(time-over-threshold,TOT)行走误差补偿的直接飞行时间(dToF)测距装置来评估FOV重定向光学元件对测距准确性和精确性的影响。
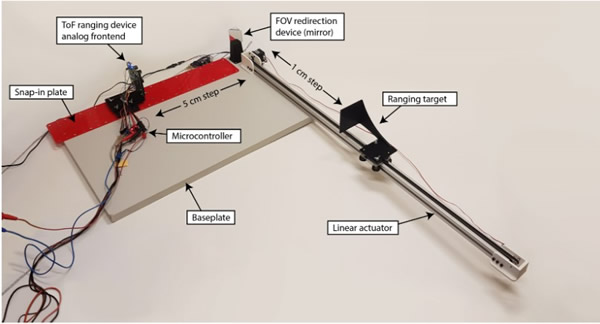
研究人员使用的测距装置
近年来,机器人在工业领域的使用方式发生了变化。机器人和人类的工作空间开始重叠,这是通过引入协作机器人实现的,协作机器人的设计使其不会伤害人类。固有安全性主要源于监测作用在机器人上的力,并在测量值超过计算出的预期值时停止运动。除了使用设计成不会伤害人类的机器人外,还可以使用速度和分离监测(speed and separation monitoring,SSM)技术。这种方法正变得越来越普遍。SSM最简单的形式是使用工业2D激光雷达扫描仪来监测机器人的周围环境。通过使用深度相机监测机器人的环境,可以实现进一步的改进。这样,不仅可以确定操作员站在哪里,还可以确定操作员是否朝着机器人的方向移动,从而实现更精细的SSM。从单一视场观察机器人周围环境的一个问题是遮挡。为了更好地测绘机器人的周围环境,可以使用放置在不同位置的多个深度相机。另一种可用于解决遮挡的方法是在机器人上安装互补深度相机或激光ToF接近传感器。类似的安全系统可以通过在机器人上分布独立的接近传感器来实现,而无需使用外部深度相机。为了充分利用这种配置的优势,必须考虑传感器的位置和方向,以实现最大的数据吞吐量,同时最大限度地减少盲点,因为当其视场重叠时,传感器可能会相互干扰。传感器的读出可用于实现连续的SSM响应(在检测到障碍物时减速或停止),或实现高级防撞算法。
目前使用ToF接近传感器的相关研究都依赖于将其安装在机器人上,从而可能在机器人周围引入了无法检测到目标的巨大盲区。卢布尔雅那大学的研究人员认为,模拟在机器人上分布多个独立的ToF传感器的效果是一种很有前途的方法。这可以通过在机器人的末端安装一个具有多个视场的集中式测距仪,并通过反射镜或棱镜将其视场分布在关节上来实现。使用集中式多视角测距装置可以实现更好的性能或更低的系统成本,因为一些通用组件可以被所有通道重复使用。
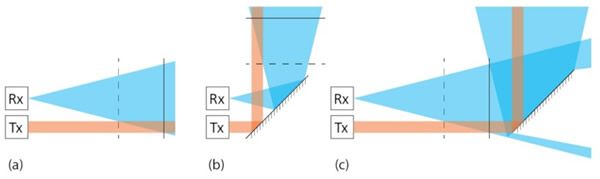
基于光的ToF测距装置的不同运行区域图
在现代激光雷达扫描仪中,使用位于盲区内的反射镜重定向激光雷达的FOV是一种常见做法。但是目前对于重定向元件可能位于测距装置视场内任何位置的研究要少得多。值得注意的例外是,使用反射镜扩大扫描激光雷达视场的研究,以及通过反射部分深度相机的FOV来实现三维物体捕捉的模拟多深度相机装置的研究。这些研究证明,反射镜可以用于重定向基于光的ToF测距装置的FOV,但没有详细说明反射镜是如何影响测量特性的。为了探索为机器人配备具有重定向FOV的多视角光ToF测距装置的方向,卢布尔雅那大学电气工程学院的研究人员分析了在预期真实条件下的反射镜和棱镜在距离测距装置不同距离处,对其测距性能的影响。研究人员选择了基于TOT的行走误差补偿的dToF测量方法,因为它不需要很长的积分时间,因此具有更高的测量速率,并且仅引入可忽略的运动模糊。
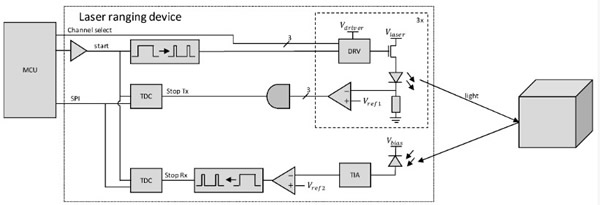
激光ToF测距装置框图
在这项研究中,研究团队探讨了前表面反射镜(front surface mirror/first surface mirror)、常规反射镜以及减反射膜棱镜对具有基于TOT的行走误差补偿的光ToF测距装置性能的影响。在目标以1厘米的增量移动的情况下,对反射镜或棱镜进行了11个距离的测量。结果表明,直接测量与FOV中有干净反射镜的测量之间没有显著差异。此外,前表面反射镜和常规反射镜之间也没有显著差异。当对反射镜进行除尘后,只要反射面在部分盲区内或更近,测量结果基本上与直接测量相同。除此之外,灰尘反射的光会引入负测量误差,当目标更远时,这种误差会更加明显;当反射镜更靠近测距装置时,这种影响也更为明显。在重定向光学器件和测距装置之间超过一定距离后,灰尘对测量的影响变得无法检测。未来可能会探索一种检测和补偿反射镜上灰尘反射的方法,以确定使用反射镜重定向FOV是否具有在工业环境中应用的潜力。
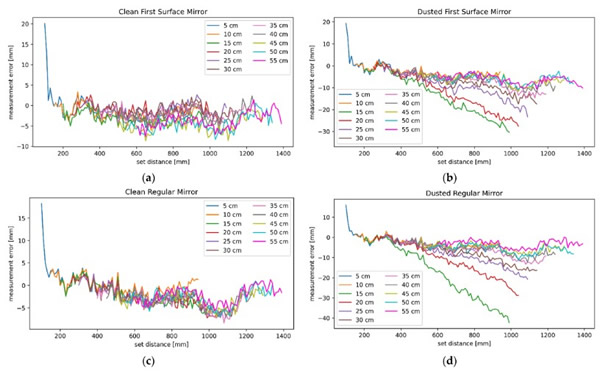
在前表面反射镜和常规反射镜上测量的测量误差
这项研究还测验了棱镜用于重定向dToF测距装置的FOV的可用性。只要整个棱镜在测距装置的部分盲区内或更近,就可以观察到设定距离和测量距离之间的强相关性,即使寄生反射对测量有一定影响。在棱镜放置更远的情况下,当目标移动时,寄生反射会迅速超过目标反射的强度,此时测量值趋于平稳。这是在棱镜最佳状态下观察到的,即带有减反射膜的干净棱镜。这项研究结果表明,除非发射和接收光路可以完全分离,否则棱镜通常不是实现既定目标的可行选择。
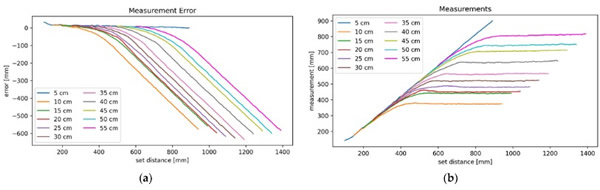
减反射膜棱镜的测量结果
论文信息:https://doi.org/10.3390/app12147121
延伸阅读:
上一篇:双光子干涉激光雷达,将深度分辨率提升至微米级
下一篇:VIDAS开发套件:用于ADAS和自动驾驶的可扩展3D感知