集成可拉伸气动应变计,可应用于无电子软体机器人
2022-07-02 17:22:18 来源:麦姆斯咨询 评论:0 点击:
与电阻传感器相比,气动应变传感器具有更小的迟滞和漂移。气动应变传感器与软体气动执行器的气动原理相同,因此只需要一个动力系统。未来,文中所提出的气动应变传感器有望在全气动、无电子元件的软体机器人器件中拥有更多的实际应用。
据麦姆斯咨询报道,近日,一支来自芬兰坦佩雷大学(Tampere University)的研究团队在Communications Engineering期刊上发表了应用于无电子软体机器人的集成可拉伸气动应变计的最新论文,这项研究工作有助于具有感知功能的无电子、全气动软体机器人的开发。
机器人的四个关键组件是传感器、执行器、逻辑器件和动力源。在经典机器人中,这些组件通常是基于电学的。然而,在软体机器人(由软材料制成的机器人)中,与其他类型的执行器(例如形状记忆合金和线驱动的执行器)相比,流体执行器具有以下几个优点:它们可以获得高抓取力,可快速执行,并可实现大变形。软体气动执行器的突破也启发了流体技术在其他软体机器人组件中的应用。其中气动回路已被用于控制软体机器人,化学反应产生的气体已被用作气动动力源。这些进展表明,软体机器人中的传感器也可以是完全流体的。然而,与其他软体机器人组件相比,软体流体传感器受到的关注较少。
应变传感器是机器人中最重要的一种传感器类型,它在不同的配置中可以测量外部感知信息(例如,力、压力)或本体感知信息(例如,姿态、曲率)。目前,软体机器人中使用的大多数应变传感器都会输出电信号。人们已经提出了许多不同类型的传感器,包括电阻、电容、摩擦电和光学传感器等。电阻应变计是最简单的一种电学传感器。电阻应变计由蜿蜒曲折的电阻路径构成,其中电阻随应变而变化。由于软体机器人的应变可能很大(例如,高达1000%),因此人们提出了替代传统金属箔应变计的方法,例如液态金属、印刷电子和不同的离子导体等。
将这些类型的传感器添加到软体机器人中往往会增加其复杂性:(1)机器人材料和传感器材料之间的界面是典型的失效点(分层、液态合金中的气泡等);(2)传感器材料采用不同的工艺制造,在机器人制造工艺中增加了多个步骤(填充液态合金通道、印刷金属导体等);(3)需要单独的执行和传感的控制和动力系统;和(4)需要利用换能器将信号从一个能量域转移到另一个能量域。
使用与机器人其余部分相同的材料制造的软体流体传感器可以解决上述所有问题。人们提出了几种基于测量密封空气腔室内压力的流体传感器。当腔室的形状因伸长、压缩或弯曲而发生改变时,其体积也会改变,从而导致腔室内部的压力发生改变。例如,Yang等人提出将气动腔室集成到夹持器中以测量接触力和曲率,Choi等人提出了基于三个径向对称气动腔室的三轴力传感器,Tawk等人提出了应用于人机界面的气动传感腔室。与这些想法相关,Agaoglu等人提出了一种具有两个腔室的解决方案,一个充满液体,另一个充满空气,中间有一个通道。当液体腔室变形时,水-空气界面发生位移,这可以通过基于图像的测量技术进行测量。
该论文的作者们认为,基于在封闭有机硅腔室内密封流体的方法对于长期测量而言本质上是不稳定的,因为任何泄漏都会改变传感器的输出。泄漏不仅会在连接故障时发生,还会在裂纹和破裂时发生。有机硅弹性体对气体和许多油具有渗透性,这会导致流体在长时间内缓慢扩散进出腔室。
考虑到机器人技术研究人员和开发人员对电路分析的熟悉程度,许多软体机器人都具有其等效电路:容器类似于电容,气阀类似于晶体管,窄通道类似于电阻。Kusuda等人在基于单个气动微通道的u形弯曲传感器中使用了电阻的电流体(electrofluidic)模拟。他们能够通过测量微通道中流速的变化来测量执行器的弯曲度。
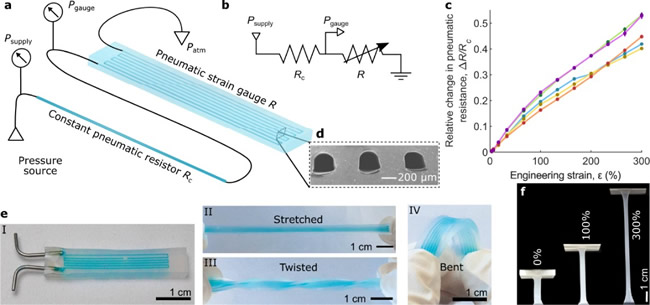
图1 可拉伸气动应变计
在本论文中,作者们报道了极软材料中蜿蜒曲折的气动微通道可用作气动电阻应变计(图1a),类似于电阻应变计。他们使用电流体模拟(图1b)将微通道内的测量压力转换为流体阻力,并表明当通道伸长时,流体阻力会增加(图1c)。气动应变计(图1d,e)中的微通道是通过将弹性体浇铸到3D打印或光刻的模具中来制造的。实验结果表明,提出的气动应变计在长期加载期间是稳定的,没有迟滞现象,并且能够承受高达300%的工程应变(图1f)。他们将这种气动应变传感器集成到一个软体机器人夹持器中,并表明它们可用于测量本体感知和外部感知信息:该气动应变传感器可用于检测每个夹持器手指的曲率,并可用作触觉压力传感器,以检测夹持器何时接触到物体。此外,通过将外部感知传感器的输出直接连接到软体流体执行器的驱动压力中,他们实现了一种在与物体接触时可自动闭合的夹持器,完全不需要任何电子元件。
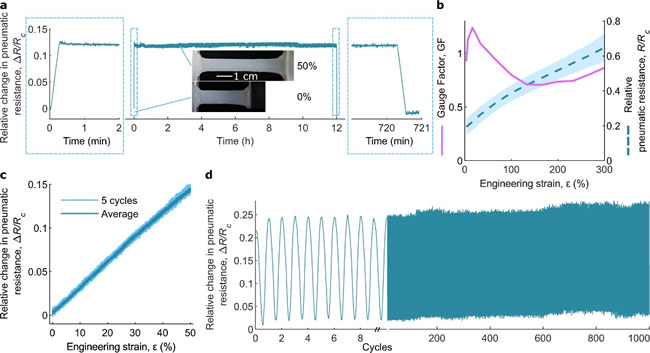
图2 软体气动应变计的稳定性和灵敏度
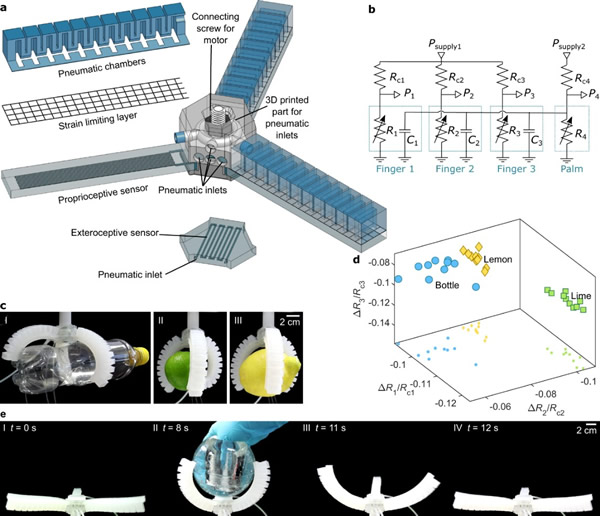
图3 具有感知功能的全气动软体机器人
综上所述,该论文中所提出的软体气动应变计提供了一种将本体感知和外部感知传感集成到气动软体机器人中的方法。与经过充分研究的基于液态合金的电阻传感器相比,提出的气动应变传感器的制造步骤更少,虽然这两种传感器都需要微流控通道,但气动应变传感器不需要在通道中填充空气以外的任何物质。与电阻传感器相比,气动应变传感器具有更小的迟滞和漂移。气动应变传感器与软体气动执行器的气动原理相同,因此只需要一个动力系统。未来,文中所提出的气动应变传感器有望在全气动、无电子元件的软体机器人器件中拥有更多的实际应用。
论文信息:
Koivikko, A., Lampinen, V., Pihlajamäki, M. et al. Integrated stretchable pneumatic strain gauges for electronics-free soft robots. Commun Eng 1, 14 (2022).
https://doi.org/10.1038/s44172-022-00015-6
延伸阅读:
上一篇:高密度表面肌电信号数据集,可用于解析手指运动“密码”
下一篇:基于微纳光纤的高灵敏度超声传感器用于光声层析成像系统