新型可编程材料,使软体机器人可以“由内而外”地感知自我运动
2022-08-23 17:08:06 来源:麦姆斯咨询 评论:0 点击:
麻省理工学院(MIT)的研究人员开发了一种具有可调机械性能的3D打印方法,使材料可以感知自身如何移动以及如何与环境相互作用。研究人员仅使用一种材料,并在3D打印机上一次运行即可构建这种具有传感能力的结构。
据麦姆斯咨询介绍,麻省理工学院(MIT)的研究人员开发了一种具有可调机械性能的3D打印方法,使材料可以感知自身如何移动以及如何与环境相互作用。研究人员仅使用一种材料,并在3D打印机上一次运行即可构建这种具有传感能力的结构。
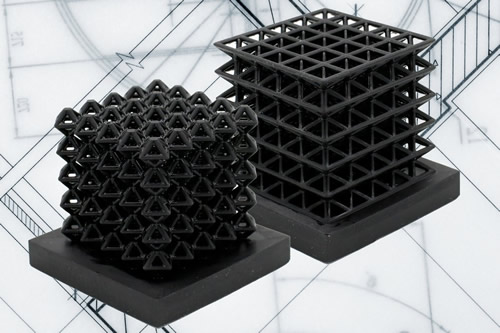
为了实现这一目标,研究人员从3D打印晶格材料着手,并在打印过程中将充气通道网络整合到结构中。当结构被挤压、弯曲或拉伸时,通过测量这些通道内的压力变化,便可以收集有关材料如何运动的反馈。
该方法为在结构化材料(Architected Materials)中嵌入传感器提供了可能。这类结构化材料的机械性能可以通过形状和组成进行编程。控制结构化材料中特征的几何结构可以改变其刚度或韧性等机械性能。例如,在研究人员打印的晶胞结构中,密度更高的晶胞网络可使结构变得更硬。
这项技术未来有望用于制造具有嵌入式传感器的软体机器人,使机器人能够感知自己的姿态和动作。它还可以用于生产可穿戴智能设备,提供关于用户如何运动或与其环境交互的反馈。
“我们的想法是可以采用任何可以3D打印的材料,并通过一种简单的方法在其中布置通道,这样我们就可以通过结构实现感知。如果采用更复杂的材料,就可以将运动、感知和结构融为一体。”该论文共同第一作者、麻省理工学院计算机科学和人工智能实验室(CSAIL)的研究生Lillian Chin说。
该论文共同第一作者还有Ryan Truby,他是前CSAIL博士后,现在已是美国西北大学的助理教授;以及通讯作者Daniela Rus,他是CSAIL主任和MIT电气工程和计算机科学Andrew and Erna Viterbi教授。这项研究成果已发表于近期的Science Advances期刊。
结构化材料
研究人员重点研究了晶格,一类结构化材料,该材料仅凭借几何结构就可以展示出可定制的机械性能。例如,改变晶格中晶胞的大小或形状就可以使材料具有一定的柔性。
虽然结构化材料可以表现出独特的特性,但鉴于其稀疏、复杂的形状,在其中集成传感器具有挑战性。在材料外部安置传感器,通常比将传感器嵌入材料内更简单。然而,当传感器安置在外部时,它们可能无法完整反馈材料的形变或移动。
研究人员利用3D打印技术将充满空气的通道直接整合到形成晶格的支柱中。当结构移动或受到挤压时,这些通道会发生形变,内部的空气量也会发生变化。研究人员可以使用现成的压力传感器测量相应的压力变化,从而提供材料形变的反馈。
由于这些“流体传感器”被直接整合到材料中,因此,相比传统传感器材料更具优势。
传感结构
研究人员利用数字光处理3D打印将传感通道整合到结构中。具体来说,其结构从树脂池中拉出,然后利用投影光固化成精确的形状。图像可以被投影到未固化的树脂上,光照射的区域完成固化。
他们利用这种方法构建了几个晶格结构,并演示了当结构受到挤压和弯曲时,充气通道如何产生清晰的反馈。
在这些结果的基础上,研究人员还将这种传感器整合到了为软体机器人机械手开发的一类新材料结构中(手性剪切拉胀结构,HAS)。(注:拉胀材料也称为负泊松比材料,是泊松比为负值的结构或材料。一般材料在拉伸时,垂直于拉伸方向的部分会收缩。但拉胀材料在拉伸时,垂直拉伸方向的部分会膨胀,这是因为其特殊内部构造,以及在单轴施力下的形变方式有关。)HSA可以同时扭曲和拉伸,这使得它们能够有效的用作软体机器人执行器。但由于它们的形状复杂,因而很难使它们自身具有传感能力,亦即“传感化”。

手性剪切拉胀结构(HAS)
研究人员通过3D打印制作了一个HSA软体机器人,能够进行弯曲、扭转和拉伸等多种运动。他们让机器人进行了超过18个小时的一系列运动,以利用传感器数据进行神经网络训练,从而能够准确预测机器人的运动。
实验结果令人欣喜,这种流体传感器的预测非常精确,以至于很难区分发送到电机的信号和传感器返回的数据。
“材料科学家一直在努力优化结构化材料的功能。我们的研究可以说是一种简单但非常强大的创新,可以将材料科学家所做的工作与感知功能关联起来。一旦可以为材料添加传感功能,像我这样的机器人专家就有福了,我们可以将其作为一种主动材料,而不仅仅是被动材料。”她说。
“用连续的皮肤传感器使软体机器人具有感知能力,一直是该领域的一个公开挑战。我们开发的这种新方案,为软体机器人提供了准确的本体感知能力,并为它们通过触摸探索世界打开了大门。”Rus表示。
未来,研究人员期待为这项技术寻找新的应用,例如构建新颖的人机界面,或是内部结构中具有传感能力的其它软体设备。Chin还对利用机器学习来扩展机器人的触觉能力很感兴趣。
康奈尔大学西布利机械与航空航天工程学院副教授Robert Shepherd尽管没有参与这项研究工作,但他表示:“利用增材制造直接制造机器人很有吸引力,它可以实现通常自适应系统所要求的复杂性。MIT的研究成果通过使用相同的3D打印过程来构建形状、机构和传感阵列,将大大有助于研究人员更简便地构建复杂机器人。”
延伸阅读:
上一篇:基于集成纳米结构的可穿戴设备实时记录生理参数,可用于远程医疗
下一篇:利用智能手机摄像头可快速筛查颈部动脉变窄,即时诊断潜在的中风