MIT:借助激光雷达和人工智能,摸清灾后道路状况
2020-04-23 10:40:03 来源:麦姆斯咨询 评论:0 点击:
麦姆斯咨询:利用激光雷达(LiDAR)和人工智能(AI)的自动化工具,可以帮助应急管理人员决策、规划路线、量化城市道路损坏情况。
麦姆斯咨询:利用激光雷达(LiDAR)和人工智能(AI)的自动化工具,可以帮助应急管理人员决策、规划路线、量化城市道路损坏情况。
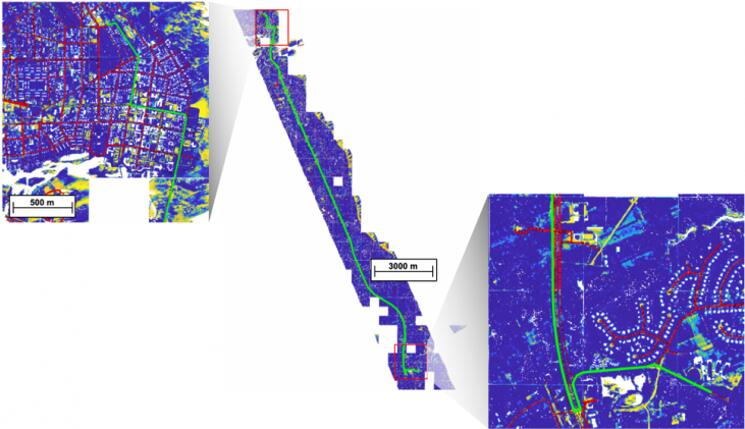
在上方的激光雷达地图中,人工智能算法识别出了道路(红色)。通过将此地图与OpenStreetMaps(简称OSM,是一个网上地图协作计划,目标是创造一个内容自由且能让所有人编辑的世界地图)匹配,用户可以在整个区域内,绕过被系统认为无法通行的道路规划路线,这里的覆盖范围可达约400平方英里。
想象一下在被飓风袭击后,倒塌的树木和房屋堵塞道路,桥梁被毁,部分道路被冲毁。应急管理人员很快就会面临一大堆问题:如何将物资运送到目标地区?疏散幸存者的最佳路线在哪里?哪些道路因损坏而无法通车?
由于没有关于公路交通网络状况的具体数据,应急管理人员往往不得不根据不完整的信息给出答复。据麦姆斯咨询报道,美国麻省理工学院(MIT)林肯实验室的人道主义援助和救灾系统小组希望利用其机载激光雷达平台,结合人工智能算法,填补这一信息空白。
“对于真正的大规模灾难,尽早了解整个交通系统的状况至关重要。”该小组研究人员Chad Council说,“通过利用我们的人工智能激光雷达方案,可以确定道路的状况是否可通行,制定最佳的路线规划,获得量化的道路损坏情况。只要放飞我们的机载激光雷达系统,然后运行它,就可以获知一切。”
自2017年飓风季以来,该小组一直在受灾城镇上空飞行其先进的激光雷达平台。其激光雷达的工作原理是在一定区域的上空自上向下发射激光脉冲,然后测量反射光子回到传感器所需要的时间。利用这些数据点绘制的三维“点云”地图,可以获得区域内每一条道路、树木、建筑精确到约一英尺的3D地图。
到目前为止,他们已经绘制了卡罗莱纳州、佛罗里达州、德克萨斯州和整个波多黎各的大片区域。在这些地区遭受飓风袭击后,研究小组立即对数据进行了人工筛选,以帮助联邦紧急事务管理局(FEMA)发现并量化道路的损坏情况,以及其它任务。该研究小组现在的重点是开发人工智能算法,使这些过程自动化,并能自动规划绕过损坏道路的路径。
检测路况
据Council称,灾后的交通网络信息常常会从各个来源以碎片化形式涌向应急管理人员,例如卫星图像、民航巡逻队拍摄的航空照片,以及经审查来源的众包信息。
“因为受灾情况复杂,这些获取数据的各种途径和努力都很重要。众包可能会是最快的信息渠道,有冗余也是好事。但当我们遇到像‘玛丽亚’飓风这样的大规模灾难时,这些不同的来源的信息可能会瞬间堵爆,并且不够完整,还很难融合。”他补充说。
这种时候,我们的激光雷达平台可以作为一种全方位的“眼睛”,提供一大片区域的完整地图,具备道路状况的详细信息。该实验室的激光雷达平台非常先进,因为它使用了对单光子敏感的盖革模式激光雷达。因此,当系统从上空飞过时,其传感器可以收集无数从树叶的间隙中穿过的光子。然后,可以将这些树叶从激光雷达地图中滤除,从而显示原本从空中看不到的道路。
为了提供交通网络的状态,需要首先利用神经网络来运算激光雷达地图。训练神经网络来发现和提取道路,并确定道路宽度。然后,利用人工智能算法搜索这些道路并标记道路无法通行的异常。例如,向上延伸并穿过道路的一组激光雷达点,很可能是一棵倒下的树木;路面高度的突然下降,很可能是道路上出现的坑洞或被冲毁的区域。
然后将提取的道路网络及其标记的异常,与该区域的OpenStreetMap开放路网合并。应急管理人员就可以使用这个系统来规划路线,或者在其他情况下,识别那些与道路网络断开的孤立社区。该系统可以为应急管理人员显示两个指定地点之间最佳的路线,并在无法通行的道路周围找到绕行路线。用户还可以设定道路偏好等级,根据设定,系统还可以提供穿过停车场或田野的特殊路线。
这一从提取道路到发现损坏再到规划路线的过程,可以应用于单个社区或整个城市范围内的数据。
速度和精确度如何?
为了了解这个系统的工作速度,在最近的一次测试中,该团队利用这款激光雷达平台,飞行探测了250平方英里的区域(面积大约相当于伊利诺伊州芝加哥市),然后处理数据,在36小时内得到了基于人工智能的分析结果。
当然,精确度和速度同样重要。“随着我们将人工智能技术引入决策支持,现在我们正在开发衡量算法性能的指标。”Council说。
为了规划道路,该算法需要确定激光雷达点云中的某个具体点是“道路”还是“非道路”。研究小组基于50000平方米的郊区探测数据对该算法进行了性能评估,结果显示,当前算法提供了87%的真实准确率(即正确标记了某个点为“道路”)。误报通常来自几何形状看上去像道路,但实际不是道路的区域。
负责算法测试工作的Dieter Schuldt说:“由于我们可以利用另一个用于识别道路一般位置的数据源OpenStreetMaps,因此可以排除这些误报,从而获得道路网络的高精度3D点云图。”
对于检测道路损坏的算法,团队正在进一步汇总地面真实数据以评估其性能。与此同时,初步结果来看是有希望的。最近,他们的道路破损发现算法对马萨诸塞州贝德福德的一条可能堵塞的道路进行了标记,道路显示出一个10 m x 7 m x 1 m的坑。该镇的公共工程部门以及实地考察证实,确实是因为施工堵塞了道路。
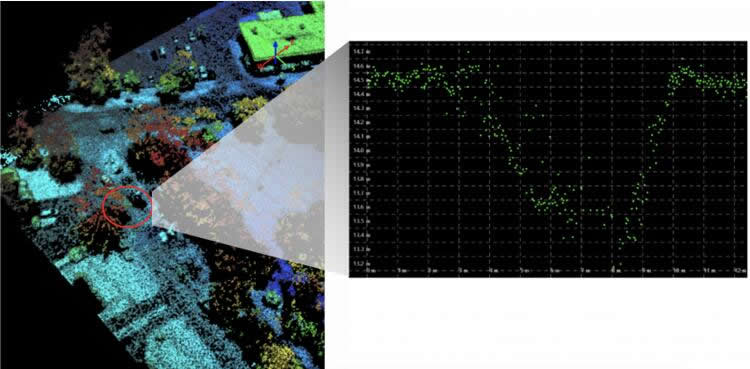
左图中,人工智能算法标记了激光雷达地图中的道路异常。查看标记区域的横截面,可以看到一个尺寸为10 m x 7 m x 1 m的坑。该地区的地面实况证实了激光雷达地图的异常标记。
“我们实际上并没有预料到这次测试能够捕捉到堵塞道路的例子,这是一个有趣的发现。”对这项研究有贡献的Bhavani Ananthabhotla说,“通过附加的道路实际注释,我们希望不仅能够评估并改善算法性能,而且能够更好地根据区域应急管理需要调整未来的模型,包括告知路线规划和维修成本估算。”
该团队正在继续测试、训练和调整他们的算法,以提高准确性。他们希望这些技术能够很快被应用以帮助解决灾后恢复的重要问题。
Council说:“我们把激光雷达想象成一个3D信息框架,其他数据可以信赖地叠加在上面。其可信赖度越高,应急管理人员以及社区就越有可能利用它来做出最佳决策。”
延伸阅读: